1
(21; 4255908/07
(2) 13.04.87
(46) 07.03.91. Чюл. V 9
(71)Новосибирский лектротехнпчес- кии институт и Специальное ьонсгрук- горско-технолох ическое бюро авю- матизации тяжелого металлорежущего оборудования
(72)Л.В.Ьогдашсв, Ь.М.Боченков, И. З.Кан, M.C.Fanny, В.С.лкои, С.Л.Рояк и Л.В.Смоляр
(53)621.313.13.014.2.621.382 (088.8)
(56)Авторское свидетельство СССР № 1619372, кл. Н 02 Р 6/00, 1986.
Трахтенберг P.M. Импульсные астатические системы электропр:шода с дискретным управлением. И.: г)псрго атомиздат, 1982, 14 с, риг-, 2.
(54)УСТРОЙСТВО ДЛЯ РГЛ УЛИ ОЬАННЯ ЧЛСЛОТЫ ВРАЩЕНИЯ ЗПЕК АТЫЯ
(57)Ичобретенис относится к -злеь- тротехнике и можег быть испольгю- вано к металлорежущих станках ими
в моделирующих стендах. Цс :ью HI обретения является улучшение регулировочных характеристик ryiet .овь ше- ния добротности и качес 11 Г| р v од-
ных процессои. С этой целью устройство лпя регулирования частоты вращения снабжено ключами 9, 10 с блоком 11 управления, делителями 7, 8 частоты, входы которых подключены к выходу генератора 6 импульсов. Вход блока 11 управления соединен с выходом блока 2 вычисления гармонических Функций. Вход блока 2 соединен с выходом реверсивного счетчика 1, а выход - с входом преобразователя 3 аналог-импульс, подключенного к силовому преобразователю 4 -электродвигателя 5. На валу электродвигателя 5 установлен индуктивный датчик 12 положения ротора. Синусный и косинусный выходы датчика 12 соединены с информационными входами бпока 2. Между выходом оогветствую-цего делителя частоты и одним из входов реверсивного счетчика установлен один из ключей 9, 10. В устройстве обеспечивается принцип астатического регулирования с преобразованием в блоке 2 триго- неметрической функции sin(( -К) sin cosft- . 2 ил.
(Л
О5
со со
Јь
оэ
Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано в приводах металлорежущих станков или моделирующих стендов.
Цель изобретения - улучшение регулировочных характеристик, путем повышения добротности и качества переходных процессов.
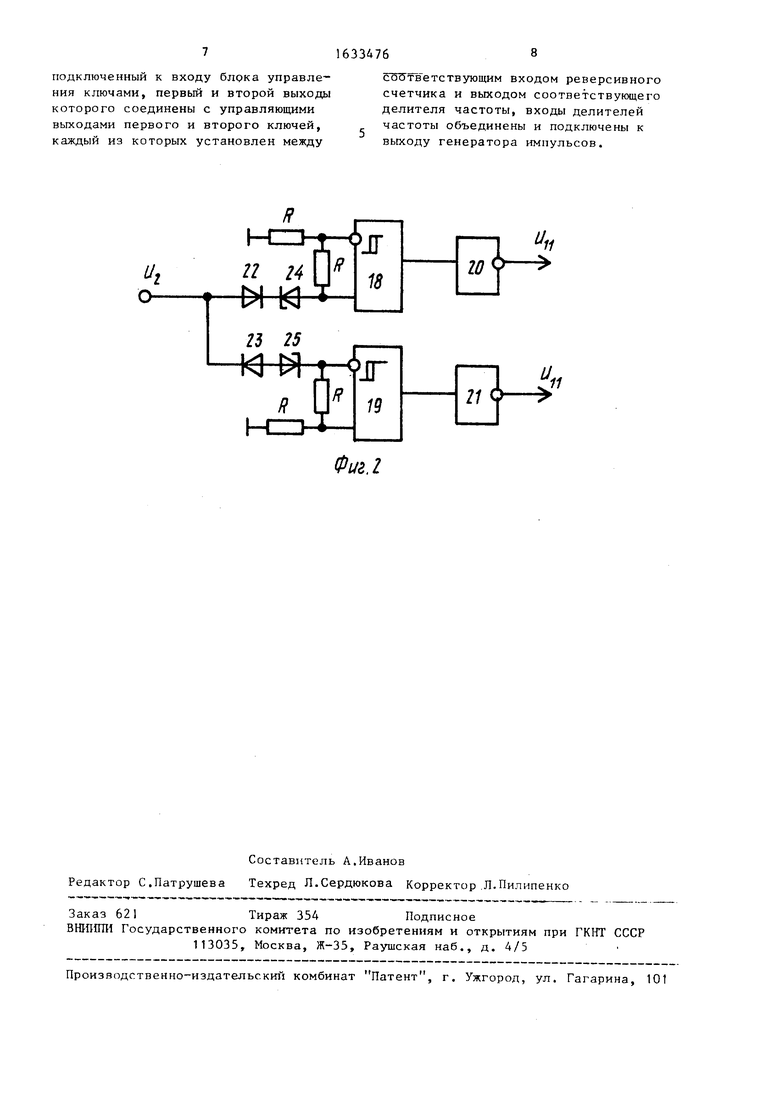
На фиг.1 изображена функциональн схема устройства для регулирования частоты вращения электродвигателя; на фиг.2 - схема блока управления ключами.
Устройство для регулирования частоты вращения электродвигателя содержит последовательно соединенные реверсивный счетчик 1, блок 2 вычисления гармонических функций, преобр
зователь 3 лнллог - импульс, силово преобразователь 4, выход которого подключен к электродвигателю 5, и генератор 6 импульсов. Кроме того, устройство содержит два делителя 7 и 8 частоты, два управляемых ключа 9 и 10, блок 11 управления ключами, индуктивный датчик 12 положения ро- тора с синусным и косинусным выходами. Датчик 12 механически связан с электродвигателем. Блок 2 вычисления включает в себя формирователь 1 синусоидальной функции и формирователь 14 синусоидальной функции, каждый из которых выполнен в виде постоянно запоминающего устройства (ПЗУ). Входы ПЗУ 13 и 14 объединены и образуют вход блока 2 вычисления. Выходы первого 13 и второго 14 ПЗУ подключены к первым входам блоков 15 и 16 умножения соответственно. Блоки 15 и 16 умножения представляю собой цифроансшогиьые преобразовате (ЦАП), выходы которых подключены соответственно к прямому и инверсно входам усилителя 17.
Выход усилителя 17 является выходом вычислительного блока 2, втор (опорные) входы ЦАП 16 и 15 являютс соответственно первым и вторым инфомационными входами блока вычисления которые подключены соответственно к синусному и косинусному выходам датчика 12 положения ротора.
Входы делителей 7 и 8 частоты объединены и подключены к выходу генератора 6 импульсов, а их выходы через коммутируемые выводы ключей 9 и 10 подключены соответственно к
суммирующему и вычитающему входам реверсивного счетчика 1. Управляющие входы ключей 9 и 10 подключены к выходам блока 11 управления ключами, вход которого подключен к выходу вычислительного блока 2.
Блок 11 управления ключами состоит из двух триггеров 18 и 19 Шмидта (фиг.2), снабженных входными диодно- резистивными цепями и выходными инверторами 20 и 21. Суммарное падение напряжения на диоде 22 (23) и стабилитроне 24 (25) определяет ширину
МРТ значение нуля
зоны нечувствительности U
А
При
I Ia
IU6)(/ L U 1 выходные напряжения имеют значение логической единицы. В противном случае одно из выходных на пряжений в зависимости от знака при5
0
5
Устройство работает следующим образом.
На вход ПЗУ 13 и ПЗУ 14 поступают двоичные адресные коды, каждому из кот фых соответствует выходной код значения предварительно затабулиро- ванной синусоидальной и косинусо- идальной тригонометрической функции. На опорные входы ЦАП 15 и 16 поступают напряжения с датчика 12, пропорциональные соответственно косинусу и синусу угла поворота ротора электродвигателя 5.
Таким образом, входные напряжения суммирующего усилителя 17 имеют вид
(О
(2)
Um sin03cos6p; ulb Um cos0lSin9p,
где
0
Q заданный угол поворота ротора;
С; р - реальный угол поворота ротора.
На выходе усилителя 17 формируется напряжение, пропорциональное разности напряжений (1) и (2)
45
U
7 kl r sin(0,-0p),
(3)
где k -коэффициент передачи усилителя 1 7 .
Дня повышения линейности регулировочной характеристики устройства необходимо использовать участок, где справедливо соотношение sin с 0 При этом усилитель 17 работает в режиме усилителя - ограничителя, г.е. выходное напряжение имеет трапецеидальную форму. Па линейном участке ус плите т), формирует напряпордиональное угловому россогла о- ванию, поступает на преобразователь 3, где вырабатываются импу ьсы управления преобразователем 4, выходной ток которого формирует грсбусмып момент на валу элсктр. г ,1-,ч гг. г с 5.
При /U2 / Сд или
дин
Л,
з апирае г с /:
из ключей У или 10, и код yi n,i «-- начинаем изменяться . nfui (ч .-rpte, либо медтеннее , ч1 о поз;н ЛЯ1 г ус : pc/i i - ству быстрее и с мены(м перерегули - рованием вернуться г- состояние, при котором /U2 С д.
Пусть dl угол I onopoj i некоторого вала, катающегося с ад, скоростью, (Ур - угол noHojio га реального ват. Задачу с i абн шза пш частоты вращения t-. считать решен- пой при 0;,- бр cons (Ci), г ди значение const неваАно. Условие (6)
алия Qр n i , ь роп гя perv
i-Ч 1ППГ1М- - Доп/
)0 I :5-J ГСТВует максимальному длит еть:-1ом - моменту JACK тролвигат еля 5. При оюм снижается перерегулирование в пере::одлирование
73
нил сь углов не 0 Q Р ( & 5 °- :vie величина () доп
35
пг
Г1
40
хсдных процессов, введены два делителя частоты, два управляемых ключа, блок управления ключами, индуктивный датчик положения ротора электродвигателя с синусным и косинусным выходами, а блок вычисления гармоничес- iих функций составлен из формиров толя синусоидальной функции, формирователя косинусоидальной функции, входы которых обт.единены и образуют вход блока вычисления, двух блоков умножения и усилителя, первые входы блоков умножения подключены соответ- огненно к выходам первого и второго формирователей, вторые входы блоков умножения образуют соответственно первый и второй информационные входы блока вычисления гармонических функции, при DTOM первый информа-- 5Q пионный вход блока вычисления под- кмгочен к синусному выходу датчика положения ротора, косинусный выход которого соединен с вторым информационным входом блока вычисления, выходы блоков умножения соединены соответственно е прямым и инверсным входами усилителя, выход которого обра1уот выход блока вычисления гармонических функции, дополнительно
45
55
подключенный к входу блока управления ключами, первый и второй выходы которого соединены с управляющими выходами первого и второго ключей, каждый из которых установлен между
соответствующим входом реверсивного счетчика и выходом соответствующего делителя частоты, входы делителей частоты объединены и подключены к выходу генератора импульсов.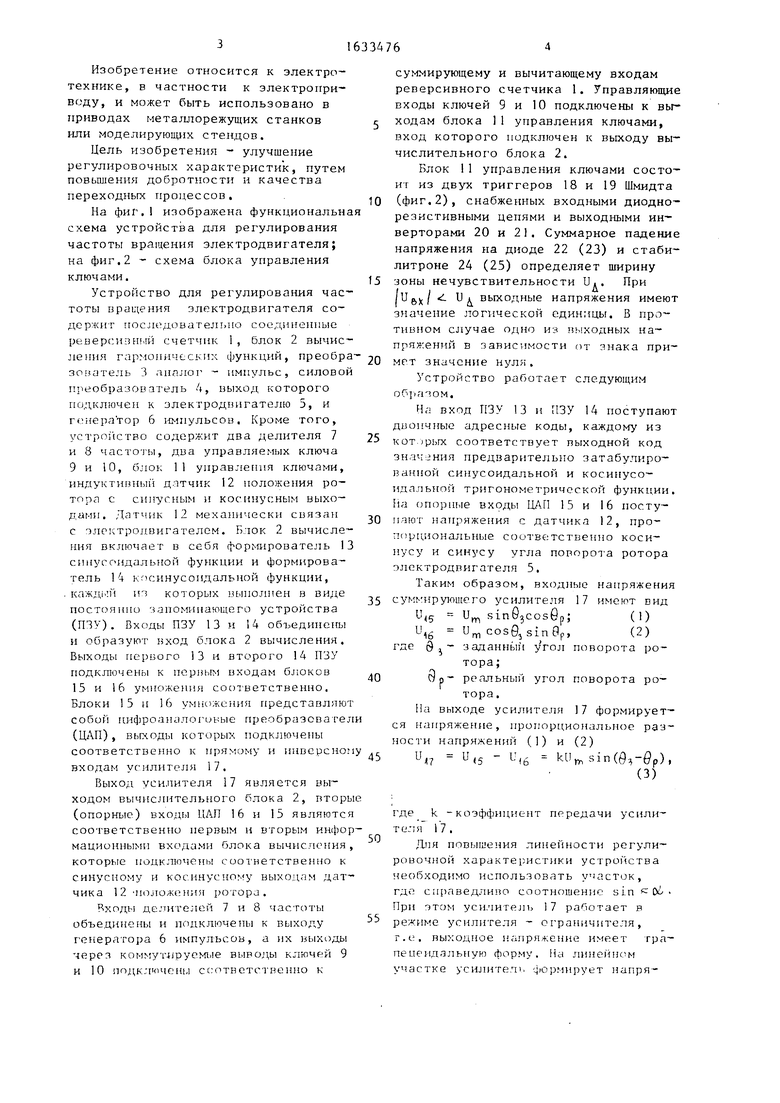

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электродвигателем | 1987 |
|
SU1633475A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Преобразователь угол-код | 1986 |
|
SU1336242A1 |
| Устройство для дискретного преобразования Фурье | 1984 |
|
SU1188751A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1711635C |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
и,
22 24 W3
23 25
«-Й
Фиг. 2
А
7}
и.
11
