1-4.
c oo
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором по вектору скорости | 1989 |
|
SU1705803A1 |
| Устройство для графической регистрации характеристик объекта при вибрационных испытаниях | 1972 |
|
SU478199A1 |
| Телеизмерительная система | 1977 |
|
SU682936A1 |
| Многофункциональный преобразователь | 1985 |
|
SU1267443A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для преобразования координат | 1984 |
|
SU1236466A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1120378A1 |
| Телевизионное устройство для поиска и слежения за двумя источниками излучения | 1981 |
|
SU985973A2 |
| Векторкардиограф | 1978 |
|
SU938930A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1985 |
|
SU1316027A1 |
И ioopemine опнникя к pooo ioi t MIIIKI и может быть И H(J ib онаш) ч икмчмч г )авюния nidi ающими тр икпорпн (ми 1.11 i. (.тнами moopt нния ян гж. i я i пны nit ние на н /мкк ги и очш i и (. ш и мм пр а ык/Kt iiponunm ( -IKUII i щии ( и i. гс ма t к i ои i и i и н, i праь и ыя i iaK)iiuio idioEidHHbit iidp, i ры рапм ы б ЮКОН (И(7СМ1.1 б 10k I IlplH Н НИЯ КОМ I, i апис и пран тюте i о комм 1апиеи и м н i им к чсированис м н с им с MI о пжа uicpi io)on iJ)O)MH)VK)iu i о прообразы траектории каж юи по и аппара i а о юк i никинм npi xi i DC nib VII , , н М v u i i I И OKI KI li1 ItI III ( 00 i I t JO )I I i ) ill H Оii 4 |i НЯЮ1 tI i illi llltpi M1 IHli i i к i a N и i i к i i i i II IX i I i Ii i И I М г И IH III I 1 I h IIi I il M IKI, И|И I- 1 v Vl1 ИI 111 14 I ( I III I H li i Ult I1 П vi1 I t I l I ИИ I I a t t H Mc Ml I H) I lit I s l )OIч in illI M 1 H Hf if )(l Hi 41It ipt О i I (M HI H) ht ) II ItI I Ь 1 И l I I ll Ml iI ) i и vi и i 1ЧИ iiin1 К ) I opoc i I it f I I и 1 l . v г i i HI и К i i чi i i at Hi oo t i i i i i н i ,) ЧИ 11ЫХ i|dfM Vl (HII t II Hi И 1ИО I I HO i I I i H HI iti iHi I 1 1 I , V
iltofjpCKHIR (JIHOCHU/i У |)ОГ)О I ОМ Ч ЧИКС
и мо/кс г быть ис поль (она но а системах vi ран 1СНИЯ mai ак)1чими ip.uiLiiopi ными i pc i с i нами
Цель июбрскнин ионыпкнш на к /к иск г и и точности сиисмы иран юния t же MipoiiunHt ее SKLII ыции
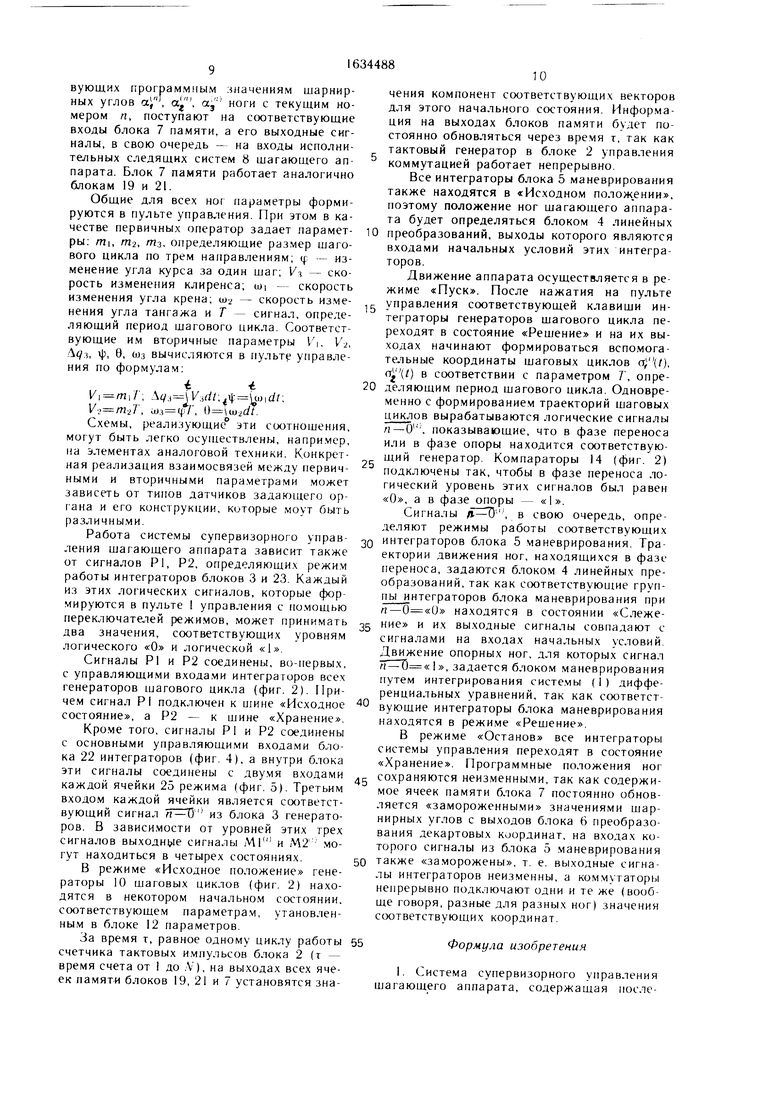
На фш 1 nioopaAtiia )н нкниоп, схема сискмы с упс рви topnoi о пра1мения
на фш
iXiMa оюка ICHC
pd горок на фи i TO/KI б юк i .инсичых
II ЧООр 1 (OHaill H И ) 1чК I I l i Ъ
Н J pill 4i Xl M i ( l IK ill
фи i с xi ма я н ики , м i н i. i
Р I I I M tlI I К V i Ii
мя i и па фш /t м ч1 i ч| ч i MI
0юка на фш s о MI i ( v iи пряных час 11 и икр {ч it н i1 i i i i
1И И H, фИГ ЧI 4.1 У i tl IOC i J l 1 I
( l I 1 I11 h.i II
I | III 1 J I ( l Г lit Г (н
I КО IU Ы I I ч l I
;
E JK,
coi ласоианные параметры работы блоков системы, блока 2 управления коммутацией, управляющего коммутацией и мультиплексированием в системе; блока 3 генераторов, формирующего прообразы траекторий шаговых циклов каждой ноги аппарата; блока 4 линейных преобразований и блока 5 маневрирования, формирующих декартовы координаты конца ноги; блока 6 преобразования декартовых координат, вычисляющего шарнирные углы, соответствующие заданным декартовым координатам конца ноги; блока 7 памяти, сохраняющего вычисленные шачения шарнирных углов каждой из ног на промежутке цикла мультиплексирования; исполнительных следящих систем 8 шагающего аппарата, датчиков 9 контакта ног с опорной поверхностью.
Блок 2 управления коммутацией состоит и последовательно включенных задающего iактового генератора и счетчика импульсов. Двоичный выход счетчика служит выходом мока управлении коммутацией и задает (екущий номер HOI и п Выход, блока 2 управления коммутацией соединен с дополнительным управляющим входом блока 3 генера- тров, блока 4 линейных преобразований, :лока о маневрирования и управляющим входом блока 7 памяти.
Блок 3 генераторов (фиг. 2) включает к себя А идентичных генераторов 10 шаговых циклов ( - число ног шагающего аппарата), два коммутатора 11 на V каналов каждый, блок 12 параметров. Кроме того, первый выход каждого генератора К) соединен с цепочкой последовательно соединенных дифференциатора 13 и компаратора 14.
Входами в блок i енераторов служат: сигнал 7. определяющий период шаговых циклов, два управляющих сигнала режима PI, P2 с выходов пульта 1 управления, задающих режимы б.чока 3 енераторов, код екушего номера ноги п с выхода блока 2 правления коммутацией, а также сигналы F датчиков 9 контакта каждой ноги с опорной поверхностью. Первый и второй выходные сш налы каждою генератора 10 о;1 и о 1Н) на соогвекч в ющие информационные входы двух коммутаторов 11, на чравлнющие входы которых одновременно носi пает код текущею номера ноги. Выходами блока 3 генераторов являются выходные сигналы коммутаторов И, соответ- С1вуюш.ие вспомогательным координатам и at шагового цикла ноги с номером п,
ч
логические сигналы
FF-О
U)
которые формируются на выходах компараторов 14 из производных о, первых выходных сигналов каждого генератора. Вторые входы всех компараторов 14 соединены с общей шиной.
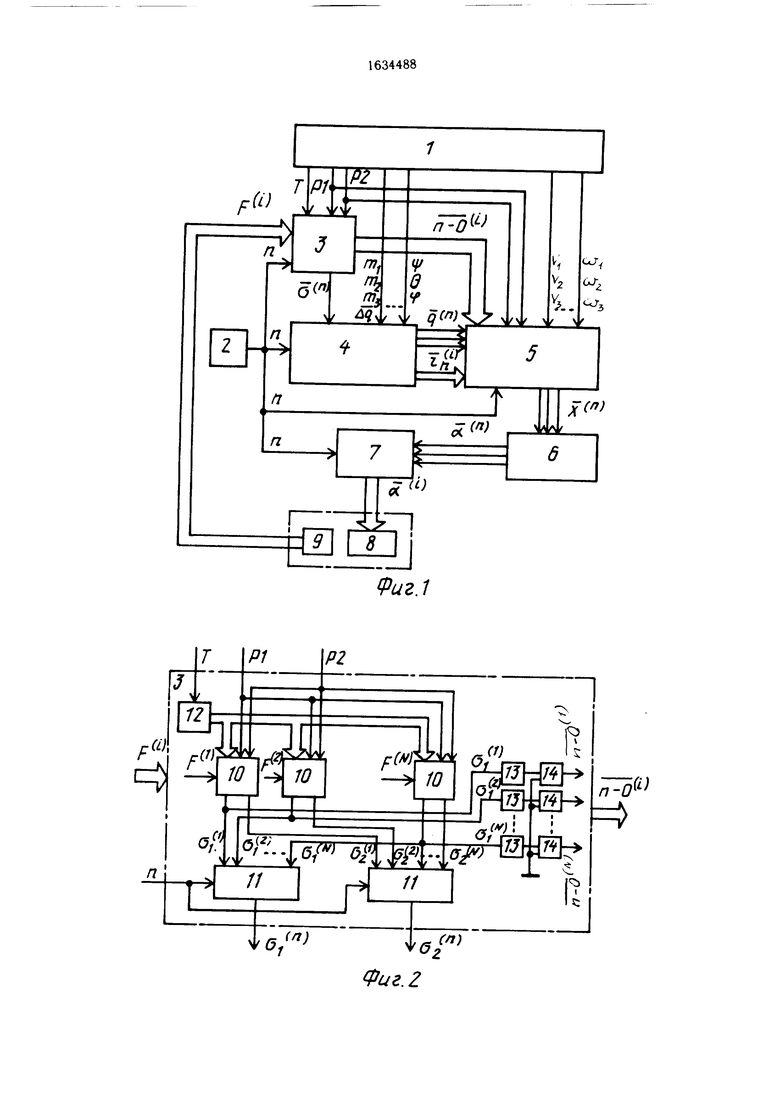
Блок 4 линейных преобразований (фиг. 3) содержит элок 15 кинематических параметров, блок 16 коммутаторов, состоящий из трех коммутаторов (фиг. 9), вычислительный блок 17, блок 18 поворота координат и блок 19 памяти. Выходы блока параметров, задающие компоненты векторов индивидуального смещения шаговых циклов, соединены с соответствующими входами коммутаторов блока 16.
Входами блока линейных преобразований являются вспомогательные координаты
шагового цикла , , из блока 3 генераторов поступающие на первую групггу входов блока 17, компоненты вектора q общего смещения шаговых циклов и сигналы, задающие масштабные коэффициенты т(, т2, т-л и углы поворота г), 9, ф, поступающие с выходов пульта 1 у иравления. Причем сигналы т, гп, т. Ад - входы блока 17, а компоненты вектора /У | с выходов коммутаторов блока 16 - входы второй руппы вычислительного бло0 ка 17, три выхода которого вместе с сигналами г|:, 0, qi составляют входы блока 18 поворота координат. Каждый из трех выходов блока 18 соединен с соответствующим входом блока 19 памяти, выходы которого.являются основными выходами блока 4 линей5 ных преобразований. Его дополнительными являются выходы коммутаторов
5
параметров
. #.
выходами блока 16.
0
5
0
5
0
5
Входами в блок 5 маневрирования являются сигналы 7), V-2, V,), задающие компоненты вектора V линейной скорости корпуса njaiaroiuero аппарата, и сигналы ш, ш2, соэ, задающие компоненты вектора его абсолютной угловой скорости, из пульта 1 управления, все выходы блока 4 линейных преобразований, код текущего номера ноги п из блока 2 управления коммутацией, логические сигналы п -О (, 2, ..., N) из блока 3 генераторов и управляющие сигналы режима PI, P2 из пульта 1 управления.
Блок 5 маневрирования (фиг. 3) содержит блок 20 вычислений правых частей дифференциальных уравнений, блок 21 памяти, блок 22 интеграторов, блок 23 коммутаторов (аналогичный блоку 16, фиг. 9) и блок 24 вычитания. Первую группу входов блока 20 составляют сигналы V, V, Vj,, и, u)2, шз. Каждый из трех выходов блока 20 соединен с соответствующим входом блока 21 памяти, выходы которого связаны с основными входами соответствующих интеграторов блока 22.
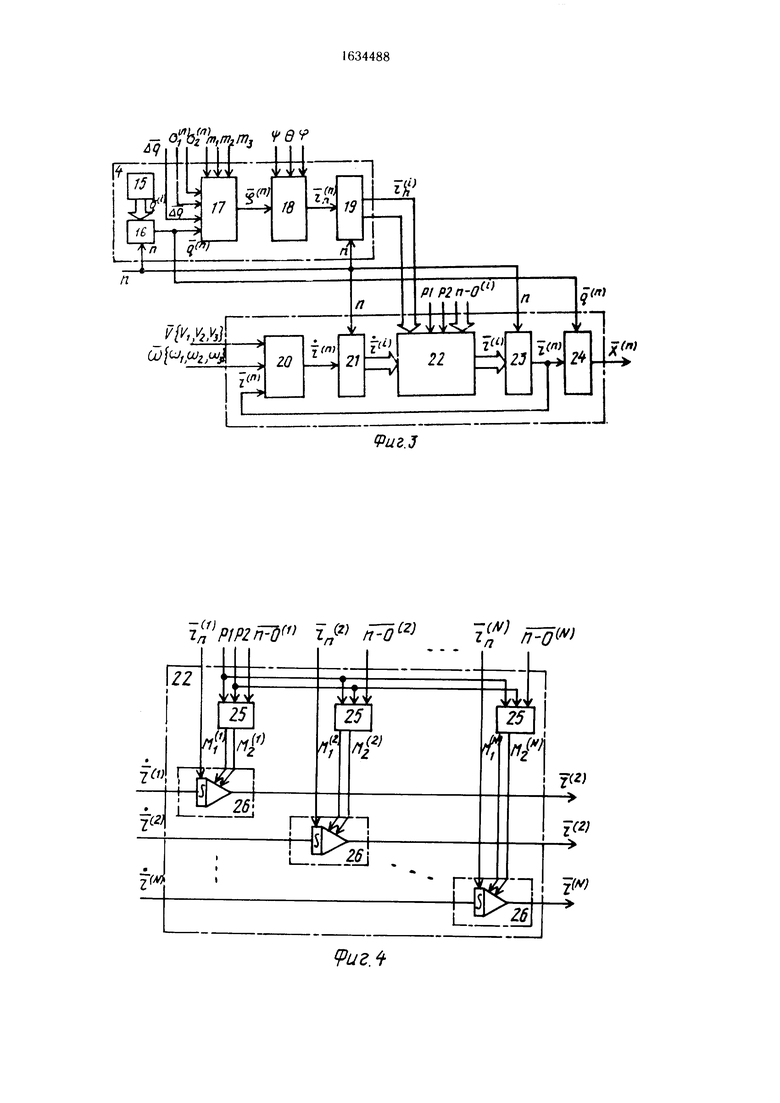
Блок 22 состоит, в свою очередь, из 3 Л идентичных интеграторов и схемы управления режимом их работы (фиг. 4). Вход начальных условий каждого из интеграторов блока 22 соединен с соответствующим основным выходом блока линейных преобразований, а выходы интеграторов блока 22 соединены с соответствующими входами трех коммутаторов блока 23 (фиг. 9), на управляющие входы которых поступает код теку5
1МЧО I I
1
(it i - s прав
HU IO llOMl |) i 401 И
лен и я комм . i tin и i и
Выхоты rOMMVi 1го)ов 11хминены одно временно с сеюгвет1тв югними входами вто рои труппы вхо iOii б i жа 20 вычис 1ении и первыми мя вхо ыми б юк-t 24 вычила ния, три вторых которого соединены с соотвегстнчюшими вы«от.ами ров б чжа 4 линеши ipeoonaсований Б шь вычитания выпо шеи в ни ie трех знаковых элементов вычитания
Выходы 6 юка 2 вычитания ян жющие ся выходами блока 5 маневрирования и июг ветствующис компонентам , век тора декартовых KOI тина г конца п и но и, соединены с соответствующими вхо ыми блока 6 преобразования ,к кар юных коор 1ина (фи 1 ;
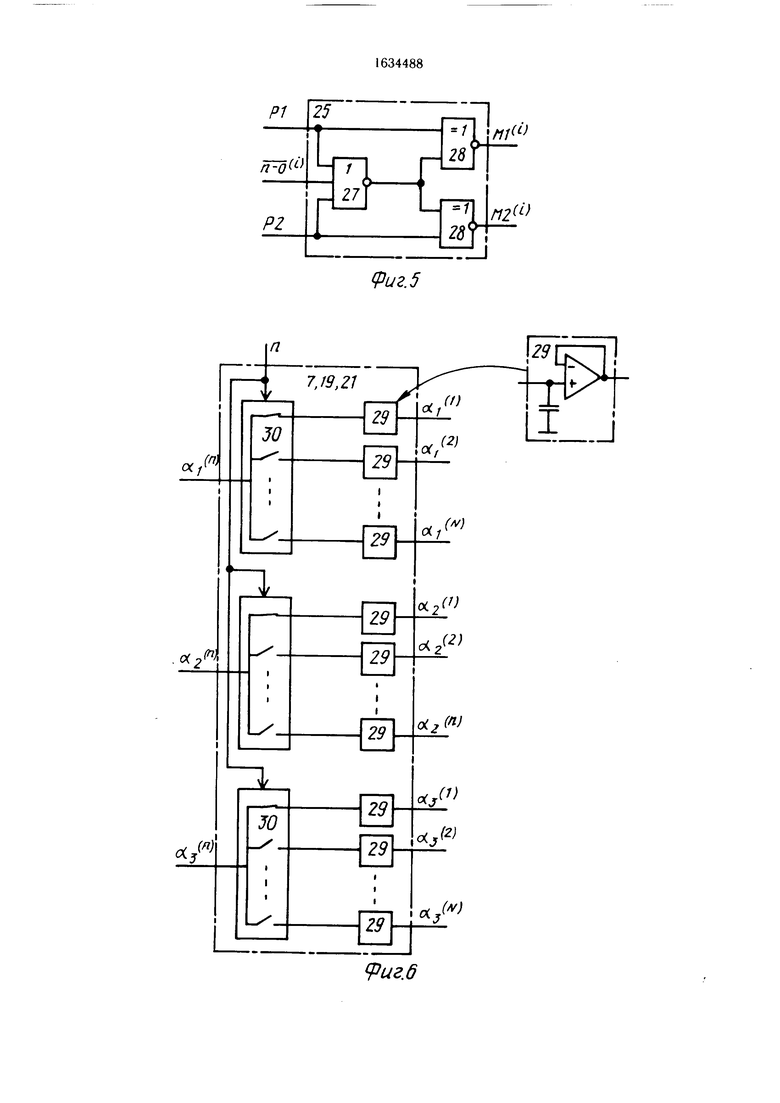
( XCMJ управ 1ени режим (м ра( ин теграгоров блока 22 и оит гн о ншако вых ячеек 25 ре-кима (фиг 41) It нрав ляющими входами яв тякт ч оеногные vn равляющие е и г на чы режима Ч, V 2 и га 1 управпения и точотните тьн h юги ie с кие i и гнали л-() е i оответству кч IHX вы хо юн блока i ( енера i op MI ( пма мыав it ния режимом нреопра i .er -л и t и, на i .1 в и налы VI I М2 hpiB имя винами 2i гппе ра оров б жа 22 ipvnna 2b . пержнт три oimuiMmiix интирпрра
Один гП )ари1нюк ящики 2 режима
(фиг ) ( ч At рЖШ (МИ J К 41 Hi И 111 Н J7
i гремя чходами и ,tn it иен 1 a 11 лЛК) ЧАЮЩГГ ИЛИ 28 . IB мя i ми к..ж U.IH Основные , пр в 1яющи( вхо in IJ и Р2 i. и е шнены v вхо а ми ) к нш 1 ИЛИ HI и первыми B oiavn toor в п.тве не i,e)Boi() и второю леменюч 2 Н горьк БХОТ.Ы тих 1ементов соешчены с вых мом юмеш i 27
ДОПОЛНИ Tt 1ЬЧЫМ KJAUJH ЯЧ1ИКИ 2)
режима является tooi н к ш Ю1 иы v in на i п - О и 5 блока i i пера юрон 1)н no IK поча. i tfl к TpeitjOMV iv к MI HI а ИЛИ HI 2 Выходные сигнгмы шрвою и в фото -не ментов 24 Н1 и юотвш т IK н но сен in няются t мграв 1ЯЮШИМИ (оонкт сгвчющеи группы 2Ь итог раюров (ipni t)
Основной вход oiit ibnoio nnrtipnopa каж ion ipvmibi 2hioeuiHtM выхо юм Bert гвуюгдеи яч1ИК|( б i ка 21 памяти а вм i начальных условий t выммом кхмвег1Т ячейки б юка 19 памяти Вычсмы первого второго и третьего интегра (:н)в каждой rpvnnbi 2) еое1ин ны i toonn ит в ющими вхо гами первого ВТО|)(УЮ и греп его комм тагор(ш б юка 21 1фи| Ч |
Как уже говори not ь выше три нымиа блока 5 маневриров гния t, г э i о in пены t cooTBeTtTBVKiiunMn вхо1ами б юка h преобраювания декартовых координат ко горый вычисляет n,ioi раммные значения шарнирных млов a.i а.г а, ноги . TIK гцим номером п Эти выхо пше turna гы б ю ка f) t (к ди пены t кю м г т в кнцими вхо 1ами б гока 7 памяти
15
0
25
35
6
Ьлоки 7 14 Ч п 1мяти IDJH и них (.отержиг V
i u ш h i/- ячеек 24 памяти
Устройств выборки хранения) or KOIU ip Пии которых зависит схемное peuumii iu t i блока Если в каче1тве ячейки 2() п (мят in повторитель . sanoviiMi IKM in конде атор(1Ч на его вхо и (чтры кыи конденсатора подич/чен к o6i, i i MI , i блок памяти может быть выпо in i t 11- i 1ано на фиг 6 К ячейкам 20 п IMHMI i б п 10 ляются три KovMvraropa 0 ь м , каждый Причем каж ши и г pi x m bop ционных вхоюв блока памяти HOIK поч к ог к входам соответ. i BV кнцих ячеек i IMM .I черьч соответствующие кан.мы KIMVUI i ров 30 правляюгпин вхот б юка п i лоторыи notTMiaei ко i R к пи i о HOMI p i HD i п и блока 2 правл1 ния м га i гч ч «. г и m и i прав 1ЯКп1ыии ixo lit рои () На (рш ( )мкн. i MI i
MvraiopiiB cot) r
Вьгхо Ы ячеек гмч яги i i
i в %о ыми i oo i в i TV i в с аи t rt s ii,i аюиц in 11 iip i i ,i, i i ,
I h ты 1 Иран ч г ня и о HH 2 , i коммутацией ыокп napiviipu i i
patXIlbl () О ОКОЬ ill c i
lopnoi о прав к чия га i KI ai о i 11 11 г to и ржн i , i i i к i in oj i ii
ii p в ни u и и ои и i tio c t p к i i ь iiiam « out рат HBtibn ii|ti i ч ii i ,4 ii1 i 2Q hoptu i a in a i акмгч о arm i i п i i пеням i вобо ibi сю HKHIU i Ь |i , n ты хправ гения i о u рж ит i i MOM KinptHta rtvna ни/м нгя i i к i ю ч а г i i и ре ж и мои p 160 г ь о . ми MI прав1ения и шат анмии i iina|)ai i
( и с i tMa i перни -f )рном) s м i ннч , oof 4i i leiVKMUUM oopauiM
Hot il ВКЛЮЧ1 НГ Я lie I 041 M i
начинам работать гакговын к е i t I прав те ния комм ч формирм i непрерг 1вн ю по 40 имп hi ов нос гупаюпи т о на вхо i i. i- пи и vii v ibt ов на V е ое гоянии
11Я П11.ТИНО1ОЮ ill.il 1К)ПК I О и И -)ТО I 41 ТЧИК НО МО1 IK) ) Hti ВЫХО Те г i i | ч
ьо u гежатсльно vt i и паи i и в ii 11 ч in i i ло I п 000 001 Din ill 1 III) 11 i .м HMO процесс повто м i я
В оотвектьии с этим мп н i o i i xoiax комм l аторов II о 101 i 11 HI no 041 pt in tranan iiBiKiun на 1Ы каждой) i Htpaiop.i niaioB о Чисто информанионнь х вхо IM HI t x к га i )ioB HI no ID u e vi x н мк к t ния ощнаково и (anmni 01 4iu м i т ающе г о аппара i a
В i вою onipeib la выхо i i м
BV К/ПГИХ ЯЧС1 К б lOK.t Г1 I I |Я I И 0 I
55 ценных преобра швании i in HIM intnaibi tcxiTBt Tv. г iu toiiim 4.111 IMV ченаям компонмч нк орщ, lr цир i чис 1ЯЮТ1 я в б IOKI пик ии npioip н
45
50
(1)
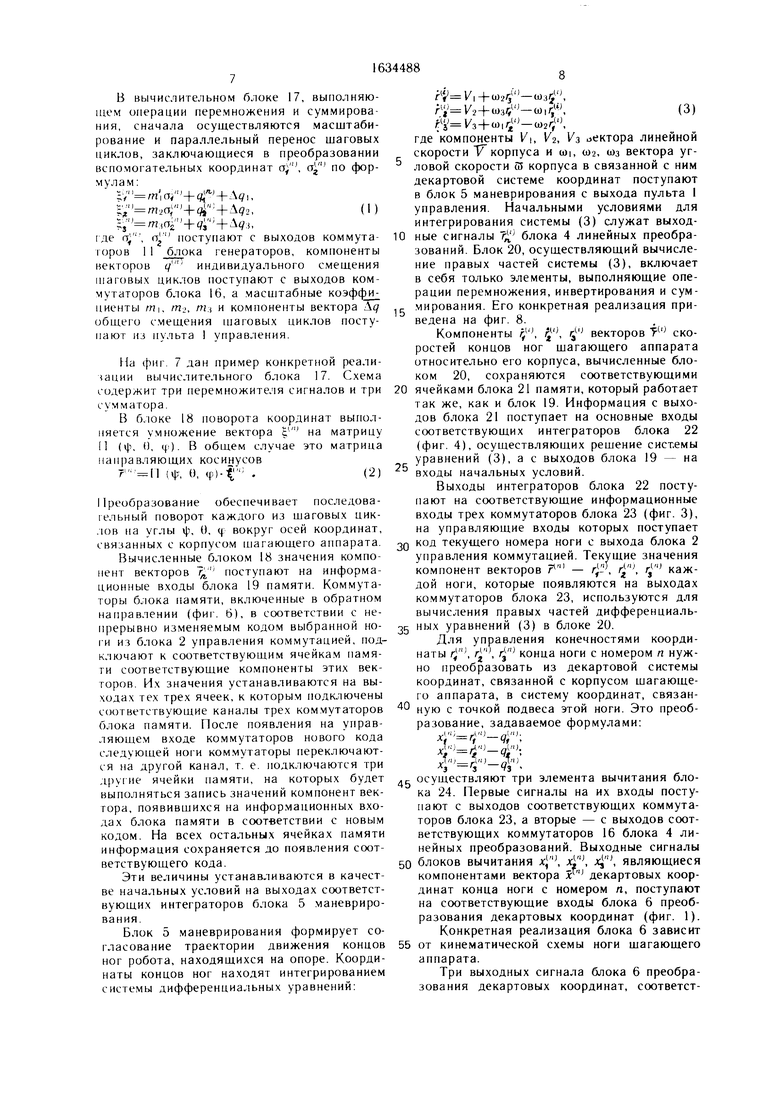
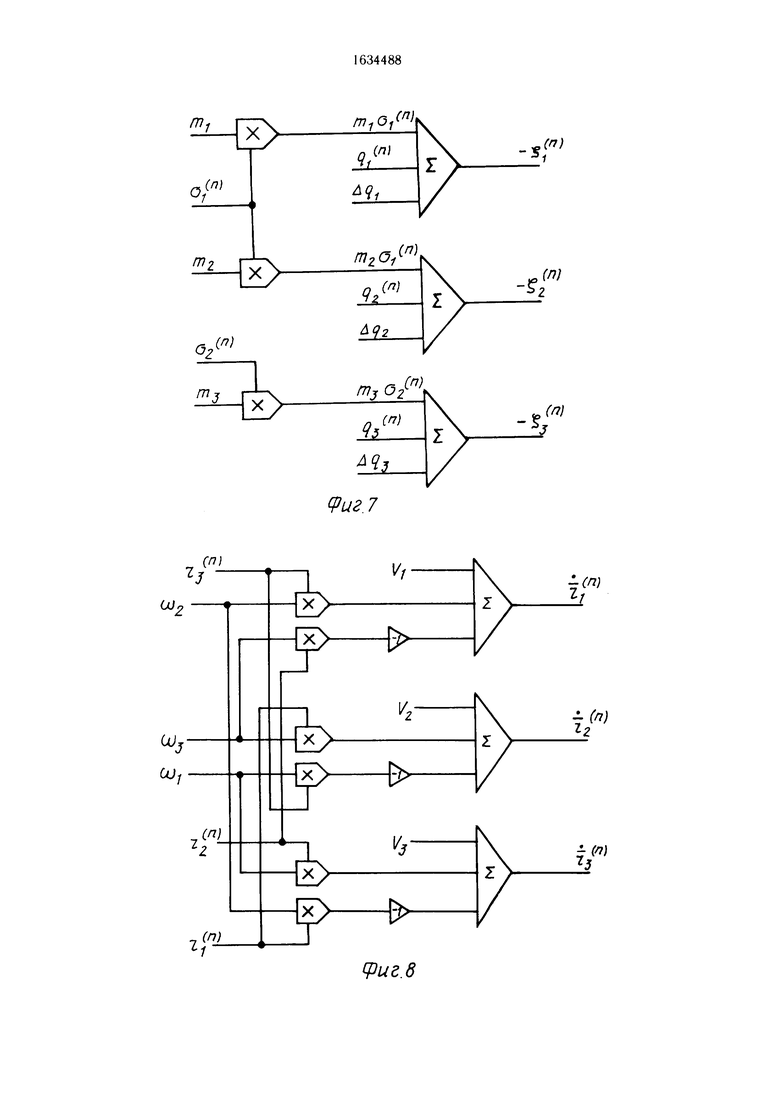
В вычислительном блоке 17, выполняющем операции перемножения и суммирования, сначала осуществляются масштабирование и параллельный перенос шаговых циклов, заключающиеся в преобразовании вспомогательных координат , по формулам:
Ј; т + ,,
;, + А92,
+ + 4i. де , поступают с выходов коммута- тров II блока генераторов, компоненты векторов / индивидуального смещения шаговых циклов поступают с выходов коммутаторов блока 16, а масштабные коэффи циенты АП|, т.), и компоненты вектора общего смещения шаговых циклов поступают из пульта I управления.
На фиг. 7 дан пример конкретной реализации вычислительного блока 17. Схема
содержит три перемножителя сигналов и три 20 ячейками блока 21 памяти, который работает
сумматора.
В блоке 18 поворота координат выполняется умножение вектора с,1 на матрицу 11 (vj t), ц ). В общем случае это матрица направляющих косинусов
П щ, О, ф) .(2)
Преобразование обеспечивает последова- 1ельный поворот каждого из шаговых циклов на углы ф, 0, ц вокруг осей координат, связанных с корпусом шагающего аппарата. Вычисленные блоком 18 значения компонент векторов 7 поступают на информационные входы блока 19 памяти. Коммутаторы блока памяти, включенные в обратном направлении (фиг. 6), в соответствии с непрерывно изменяемым кодом выбранной ноги из блока 2 управления коммутацией, подключают к соответствующим ячейкам памяти соответствующие компоненты этих векторов. Их значения устанавливаются на выходах тех трех ячеек, к которым подключены соответствующие каналы трех коммутаторов блока памяти. После появления на управляющем входе коммутаторов нового кода следующей ноги коммутаторы переключаются на другой канал, т. е. подключаются три
25
так же, как и блок 19. Информация с выходов блока 21 поступает на основные входы соответствующих интеграторов блока 22 (фиг. 4), осуществляющих решение системы уравнений (3), а с выходов блока 19 - на входы начальных условий.
Выходы интеграторов блока 22 поступают на соответствующие информационные входы трех коммутаторов блока 23 (фиг. 3), на управляющие входы которых поступает
Зо код текущего номера ноги с выхода блока 2 управления коммутацией. Текущие значения компонент векторов - , г, каждой ноги, которые появляются на выходах коммутаторов блока 23, используются для вычисления правых частей дифференциаль35 ных уравнений (3) в блоке 20.
Для управления конечностями координаты rfu, г, конца ноги с номером п нужно преобразовать из декартовой системы координат, связанной с корпусом шагающего аппарата, в систему координат, связан40 ную с точкой подвеса этой ноги. Это преобразование, задаваемое формулами:
, /,,«)П1 Ч.
Ч - Г141 .
А ч-А)а( П.
t - г Ч
Ч,() Л 1)
з гз Чг
другие ячейки памяти, на которых будет 45 осуществляют три элемента вычитания блока 24. Первые сигналы на их входы поступают с выходов соответствующих коммутаторов блока 23, а вторые - с выходов соответствующих коммутаторов 16 блока 4 линейных преобразований. Выходные сигналы 50 блоков вычитания , х, являющиеся компонентами вектора декартовых координат конца ноги с номером п, поступают на соответствующие входы блока 6 преобразования декартовых координат (фиг. 1).
Конкретная реализация блока 6 зависит 55 от кинематической схемы ноги шагающего аппарата.
Три выходных сигнала блока 6 преобразования декартовых координат, соответствыполняться запись значении компонент век- гора, появившихся на информационных входах блока памяти в соответствии с новым кодом. На всех остальных ячейках памяти информация сохраняется до появления соответствующего кода.
Эти величины устанавливаются в качестве начальных условий на выходах соответствующих интеграторов блока 5 маневрирования.
Блок 5 маневрирования формирует согласование траектории движения концов ног робота, находящихся на опоре. Координаты концов ног находят интегрированием системы дифференциальных уравнений:
г1 У|+ш2г/ -ш3, + ),/,
V3 + 0),(
(3)
10
где компоненты V, Vi, Уз оектора линейной скорости V корпуса и ш, о)2, шз вектора угловой скорости 55 корпуса в связанной с ним декартовой системе координат поступают в блок 5 маневрирования с выхода пульта 1 управления. Начальными условиями для интегрирования системы (3) служат выходные сигналы гЈ блока 4 линейных преобразований. Блок 20, осуществляющий вычисление правых частей системы (3), включает в себя только элементы, выполняющие операции перемножения, инвертирования и сум- 15 мирования. Его конкретная реализация приведена на фиг. 8.
Компоненты /jw,
ростей концов ног шагающего аппарата относительно его корпуса, вычисленные блоком 20, сохраняются соответствующими
ГгЈ векторов Tw ско5
так же, как и блок 19. Информация с выходов блока 21 поступает на основные входы соответствующих интеграторов блока 22 (фиг. 4), осуществляющих решение системы уравнений (3), а с выходов блока 19 - на входы начальных условий.
Выходы интеграторов блока 22 поступают на соответствующие информационные входы трех коммутаторов блока 23 (фиг. 3), на управляющие входы которых поступает
о код текущего номера ноги с выхода блока 2 управления коммутацией. Текущие значения компонент векторов - , г, каждой ноги, которые появляются на выходах коммутаторов блока 23, используются для вычисления правых частей дифференциаль5 ных уравнений (3) в блоке 20.
Для управления конечностями координаты rfu, г, конца ноги с номером п нужно преобразовать из декартовой системы координат, связанной с корпусом шагающего аппарата, в систему координат, связан0 ную с точкой подвеса этой ноги. Это преобразование, задаваемое формулами:
, /,,«)П1 Ч.
Ч - Г141 .
А ч-А)а( П.
t - г Ч
Ч,() Л 1)
з гз Чг
5 осуществляют три элемента вычитания бловующих программным значениям шарнирных углов а/л a.g, аэ ноги с текущим номером п, поступают на соответствующие входы блока 7 памяти, а его выходные сигналы, в свою очередь - на входы исполни тельных следящих систем 8 шагающего ап парата Блок 7 памяти работает аналогично блокам 19 и 21
Общие для всех ног параметры форми руются в пульте управления При этом в качестве первичных оператор задает параметры т, т2, тз. определяющие размер шагового цикла по трем направлениям, f - изменение угла курса за один шаг, К ч - ско рость изменения клиренса, оц - скорость изменения угла крена, ш - скорость изменения угла тангажа и Т - сигнал, определяющий период шагового цикла Соответст вующие им вторичные параметры I i, i, , v|, 0, из вычисляются в пульте управле ния по формулам
y,mi/, ,
V ,/72,27, (f/,
Схемы, реализующие0 эти соотношения, могут быть легко осуществлены, например, на элементах аналоговой техники Конкрет ная реализация взаимосвязей между первич ными и вторичными параметрами может зависеть от типов датчиков задающего ор гана и его конструкции, которые моут быть различными
Работа системы супервизорного управ ления шагающего аппарата зависит также от сигналов PI, P2, определяющих режим работы интеграторов блоков 3 и 23 Каждый из этих ло ических сигналов, которые фор мируются в пульте 1 управления с помощью переключателей режимов, может принимать два значения, соответствующих ровням логического «О и логической «1
Сигналы Р1 и Р2 соединены, во первых, с управляющими входами интеграторов всех генераторов шагового цикла (фиг 2) При чем сигнал PI подключен к шине «Исходное состояние, а Р2 - к шине «Хранение
Кроме того, сигналы Р1 и Р2 соединены с основными управляющими входами бло ка 22 интеграторов (фиг 4), а внутри блока эти сигналы соединены с двумя входами каждой ячейки 25 режима (фиг 5) Третьим входом каждой ячейки является соответствующий сигнал 7Г-О из блока 3 генераторов В зависимости от уровней этих трех сигналов выходные сигналы и М2 могут находиться в четырех состояниях
В режиме «Исходное положение генераторы 10 шаговых циклов (фиг 2) находятся в некотором начальном состоянии, соответствующем параметрам, тановлен ным в блоке 12 параметров
За время т, равное одному циклу работы счетчика тактовых импульсов блока 2 (т - время счета от 1 до ), на выходах всех ячеек памяти блоков 19, 21 и 7 установятся зна
5
чения компонент соответствующих векторов для этого начального состояния Информа ция на выходах блоков памяти по стоянно обновляться через время т, так как тактовый генератор в блоке 2 управления коммутацией работает непрерывно
Все интеграторы блока 5 маневрирования также находятся в «Исходном положении, поэтому положение ног шагающего аппарата будет определяться блоком 4 линейных
0 преобразований, выходы которого являются входами начальных условий этих интегра торов
Движение аппарата осуществляется в ре жиме «Пуск После нажатия на пульте
5 управления соответствующей клавиши интеграторы генераторов шагового цикла переходят в состояние «Решение и на их выходах начинают формироваться вспомога тельные координаты шаговых циклов oj(/), Oj V) в соответствии с параметром 7, опре0 деляющим период шагового цикла Одновременно с формированием траекторий шаговых циклов вырабатываются логические сигналы п-0, показывающие, что в фазе переноса или в фазе опоры находится соответствую щий генератор Компараторы 14 (фиг 2) подключены так, чтобы в фазе переноса ло гический уровень этих сигналов был равен «О, а в фазе опоры - «1
Сигналы fi-Ч) , в свою очередь, опре деляют режимы работы соответствующих
о интеграторов блока 5 маневрирования Тра ектории движения ног, находящихся в фазе переноса, задаются блоком 4 линейных преобразований, так как соответствующие груп- пы интеграторов блока маневрирования при находятся в состоянии «Слеже
5 ние и их выходные сигналы совпадают с сигналами на входах начальных словий Движение опорных ног, для которых сигнал Ti - 1, задается блоком маневрирования путем интегрирования системы (1) диффе ренциальных уравнений, так как соответст вующие интеграторы блока маневрирования находятся в режиме «Решение
В режиме «Останов все интеграторы системы управления переходят в состояние «Хранение Программные положения ног
5 сохраняются неизменными, так как содержимое ячеек памяти блока 7 постоянно обнов ляется «замороженными значениями шар нирных углов с выходов блока b преобразо вания декартовых координат, на входах ко торого сигналы из блока 5 маневрирования
0 также «заморожены, т е выходные сигна лы интеграторов неизменны, а ь.омм таторы непрерывно подключают одни и те же (вооб ще говоря, разные для разных ног) значения соответствующих координат
5Формула изобретения
1 Система супервизорного управления шагающего аппарата, содержащая после
0
довательно соединенные блок генераторов, блок линейных преобразований, блок маневрирования и блок преобразования декартовых координат, а также блок исполнительных следящих систем, пульт управления и датчики контакта ног с опорной поверхностью, выходы которых соединены с управляющими входами блока генераторов, при этом выходы задания параметров пульта управления соединены с соответствующими входами блока генераторов, блока линейных преобразований, блока маневрирования, а выходы задания режима пульта управления соединены с соответствующими входами блока генераторов и блока маневрирования, отличающаяся тем, что, с целью повышения надежности и точности, а также упрощения эксплуатации, в нее введены блок памяти и блок управления коммутацией, выход которого соединен с дополнительным управляющим входом блока генераторов, блока линейных преобразований, блока маневрирования и управляющим входом блока памяти, информационные входы которого соединены с соответствующими выходами блока преобразования декартовых координат, а выходы блока памяти соединены с входами блока исполнительных следящих систем, кроме того, дополнительные управляющие выходы блока генераторов соединены с дополнительными входами режима блока маневрирования
2Система по п 1, отличающаяся тем, что блок генераторов содержит блок параметров, два коммутатора и по числу ног ша- 1ающего аппарата одинаковые цепочки из последовательно соединенных генератора шаювого цикла, дифференциатора и компаратора, выходы каждого из которых являются управляющими выходами блока генераторов, параметрический вход блока операторов соединен с входом блока параметров, выходы которого соединены с соответствующими входами всех генераторов шагового цикла, первый выход каждого генератора шагового цикла соединен также с соответствующим входом первого коммутатора, а второй выход каждого генератора шагового цикла соединен с соответствующим входом второго коммутатора, причем управляющие входы коммутаторов соединены L дополнительным управляющим входом блока генераторов
3Система по п 1, отличающаяся тем, что блок линейных преобразований состоит
из последовательно включенных блока кинематических параметров, блока коммутаторов, вычислительного блока, блока поворота координат и блока памяти, при этом
выходы блока памяти и блока коммутаторов связаны с соответствующими выходами блока линейных преобразований, а вторые входы вычислительного блока, блока поворота координат, управляющий вход блока памяти и блока коммутаторов соединены с соответствующими входами блока линейных преобразований.
4Система по п. 1, отличающаяся тем, что блок маневрирования содержит последовательно соединенные блок вычислений,
блок памяти, блок интеграторов, блок коммутаторов и блок вычитания, выходы которого связаны с выходами блока маневрирования, при этом выход блока коммутаторов также соединен с входом блока вычислений, а управляющий вход блока памяти
0 и блока коммутаторов и вторые входы блока вычислений, блока интеграторов и блока вычитания связаны с соответствующими входами блока маневрирования
5Система по п 4, отличающаяся тем, 5 что блок интеграторов содержит идентичные
каналы, количество которых соответствует числу ног шагающего аппарата, каждый из которых содержит последовательно соединенные ячейки режима и группу интеграторов, выходы которых связаны с выхо0 дами блока интеграторов, а входы ячеек режима и остальные входы групп интеграторов связаны с соответствующими входами блока интеграторов, кроме того, каждая из ячеек режима содержит трехвходовый элемент ИЛИ-НЕ и два двухвходовых элемента
5 ИСКЛЮЧАЮЩЕЕ ИЛИ, выходы которых связаны с выходами ячейки, выход элемента ИЛИ-НЕ соединен с одним из входов каждого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, другие входы которых, а также входы элемента ИЛИ-НЕ связаны с соответствующими входами ячейки.
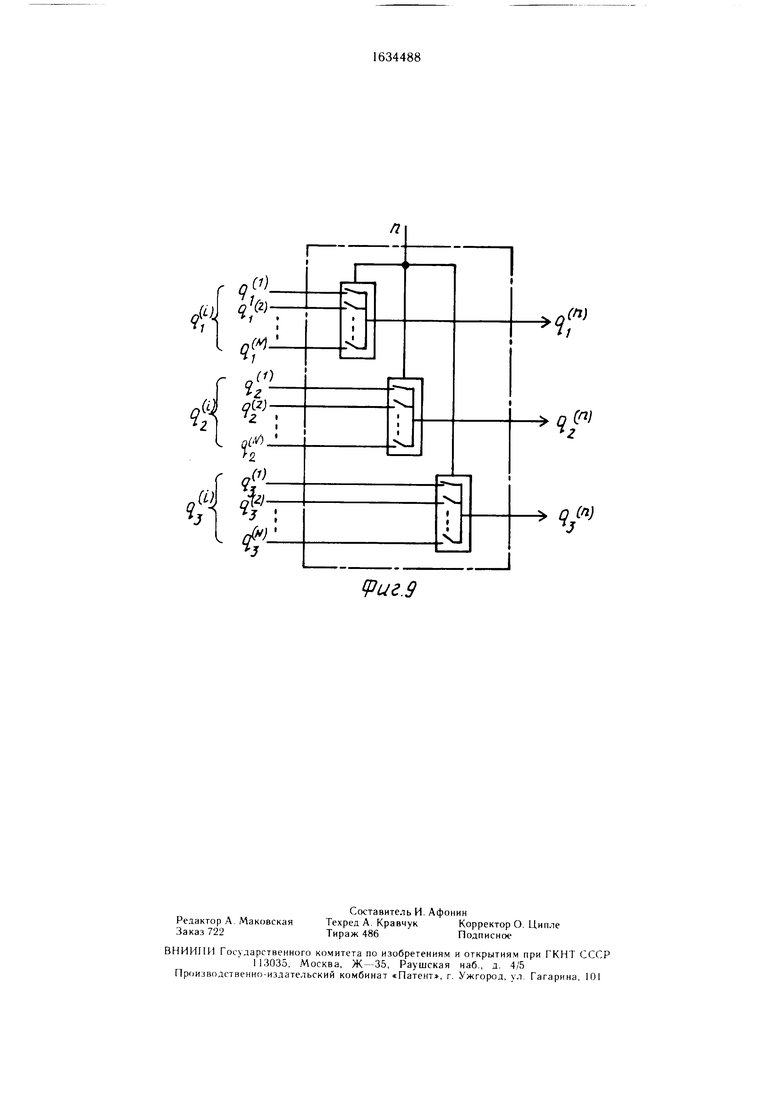
6Система по пп 1, 3 и 4, отличающаяся тем, что блок памяти состоит из трех одинаковых каналов, каждый из которых содержит ячейки памяти по числу ног шагающего
5 аппарата и коммутатор с тем же числом каналов, причем вход каждого канала блока памяти через соответствующий канал коммутатора связан с соответствующей ячейкой памяти, выходы которых соединены с выходами блока памяти, а его входы связаны
0 с соответствующими входами коммутаторов.
Т
w
{ w
W
/7
-Ott)
V
У,
qin)
..
u/Y ОД
Й/г./
(Јl &w (zfi w№WdЈi
м
Ггпй
11 tfl °2 I fn Wnlm
Ur-l I1
v
Ь7
ib 88HC9I
П2а
Фиг.5
Фиг.6
Фиг.7
--§
an)
Sz
(т
-5
(n)
i(n) ±1
j(n)
Z2
,
Фиг.в
Фиг.9