Изобретение относится к аналоговой вычислительной технике и может найти применение в системах управления манипуляторов и робототехнических систем.
Известно устройство, обеспечивающее в независимых от кинематики манипулятора координатах позиционно-скоростное управление и содержащее задающий орган, блок нелинейных преобразователей, блок пороговых элементов, вычислительное устройство, блок изменения структуры системы, исполнительный механизм. При этом в вычислительном устройстве производится преобразование командных сигналов, поступающих с задающего органа, в сигналы, соответствующие шарнирным скоростям манипулятора с помощью якобиана преобразования, связывающего шарнирные переменные манипулятора с координатами, в которых осуществляется управление.
Наиболее близким по техническому решению к предлагаемому изобретению является устройство для преобразования трехмерного вектора прямоугольных координат конца искусственной конечности в углы поворота ее звеньев, которое содержит последовательно соединенные блок сравнения, блок умножения вектора рассогласования на постоянную матрицу и блок интеграторов, выходы которого являются выходами устройства, а также тригонометрический блок в цепи обратной связи, при этом его вход соединен с выходом блока интеграторов, а выход - с вычитающим вхоVJ
О СЛ СО О
Сл
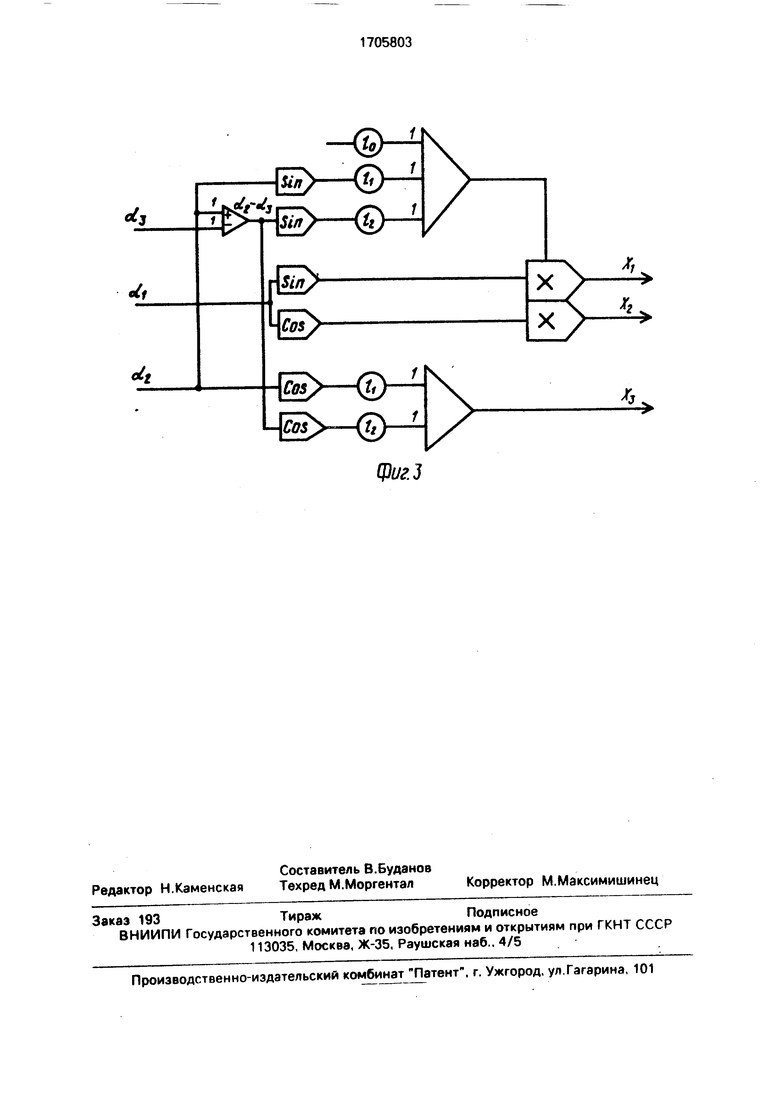
дом блока сравнения, суммирующий вход которого является входом устройства. При этом тригонометрический блок (блок прямого преобразования координат) осуществляет преобразование вектора шарнирных углов в вектор декартовых координат по формулам
Xi (lo + Н SlnCЈ -I- I. Sin(«2 - Оз)) Sln«i ,
Ха (lo + hsincs -I- 2 sin(02 - r.ft))cos«i ,
Хз I1COSG 2 + I.COS(«2 -Оз).
Недостатком указанных устройстр является то, что они че позволяют управлять отдельными шарнирами манипулятора и не обеспечиваю согласование управляющих сигналов с текущим положением манипулятора в начале работы, в том числе, при включении питания.
Целью Исюбрегения является расширение функциональных возможностей устройства за счег обеспечения управления по декартовым и шарнирным переменным и введения режима согласования выходных сигналов устройства с реальным положением манипулятора в начале работы и при переходе с управления в прямоугольной системе координат на управление отдельными шарнирами и обратно.
Технико-экономический эффект предлагаемого устройства состоит в существенном упрощении РУЧНОГО управления манипуляционными системами с большим числом степеней недвижности, в совмещении существенно пл ;ных режимов работ при малых аппаратурных затратах.
Указанная цель достигается тем, что ус тройстве со;;.-Ф-- чцее блок прямот., :,раоо- разонаниг х°ордии.-:;т. блок сравнения, блок умножен ,з пос гоянную матрицу, первый блок ин ;еграторор. выход которого является выходом устройства, d информационный вход подключен к выходу блока умножения на постоянную иафицу, вход которого подключен к рыходу олока сравнения, первый
;ХОД KOIOpjrO Подключен К БыХОДу 6/ЮКЗ
прямого п рио6иа.: О1;аннч координат, дополнительно с- .держит первый и второй блоки коммутатор.);. ьтс}..зй блок интеграторов, элемент И, элемент ЧЕ, вход которого подключен к управляющему Б/.ОДУ второго блока интеграторов и является первым входам режима раСс-гы услройсгва, а выход - к первому входу эпьмен га И. второй аход которого подключен к управляющему входу первого блока интеграторов и является вторым входом задания режима работы устройства, а выход соединен с управляющими входами первого и вгороги блоков коммутаторов, выходы которых подключены соответственно к входу t.-iOK3 прямого преобразования ко(1)
ординат и к входу задания начальных условий второго блока интеграторов, выход которого подключен к второму входу блока сравнения и к входу задания начальных условий первого блока интеграторов, а информационный вход является входом задания скорости изменения переменных устройства, выход первого блока интеграторов подключен к первому информационному входу 10 первого блока коммутаторов, второй информационный вход которого подключен к первому информационному входу второго блока коммутаторов и является входом текущего положения шарниров манипулятора
15 устройства, второй информационный вход первого блока коммутаторов подключен к выходу блока прямого преобразования координат, при этом блок сравнения выполнен в виде блока сумматоров.
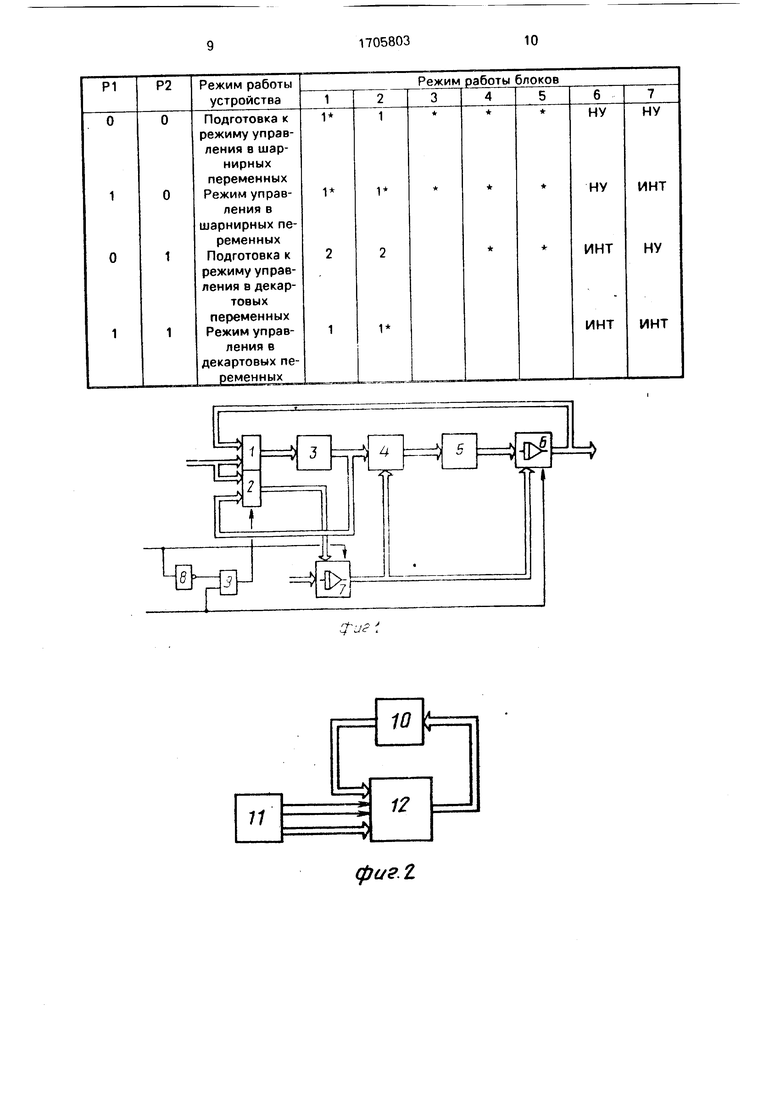
20На фиг. 1 показана блок-схема устройства; на фиг 2 - схема подключения предлагаемого устройства для управления манипулятором; на фиг.З - пример конкретной реализации блока прямого преобразо25 вания координат.
На фиг.4 приведена таблица, поясняющая изменение структуры связей между блоками устройства в различных режимах работы.
30Устройство для управления манипулятором по вектору скорости (фиг.1) содержит первый и второй блоки коммутаторов 1,2, блок прямого преобразования координат 3, блок суммирования 4, блок умножения на
35 постоянную матрицу 5, первый и второй блоки интеграторов 6, 7, элемент НЕ 8, элемент И 9. Устройство имеет два логических входа Р1, Р2 и два информационных входа - вход текущего положения шарниров мани40 пулятора а-, и вход задания скорости изменения переменных V. Выходом устройства являются сигналы программного положения шарниров манипулятора. «п.
На фиг.2 представлена схема подключе45 нип предлагаемого устройства для управления манипулятором, содержащая объект управления - манипулятор 10. пульт управления 11 и предлагаемое устройство 12. Вход текущего положения устройства
50 соединяется с выходами ат датчиков манипулятора, вход задания скорости изменения переменных - с выходами V пульта оператора. На логические входы Р1 и Р2 с пульта поступают сигналы управления режимом
55 работы устройства. При этом вход Р1 (фиг. 1) соединен с управляющим входом блока интеграторов 7, а вход Р2 - с управляющим входом блока интеграторов 6. Логический вход Р1 соединен также со входом элемента
НЕ 8, выход которого соед- :гч с первым входом элемента И 9. Второй вход члемен гя 9 соединен с первый логич кнм входом Г 1. устройства, а его выход соединен с упр.эвля ющими входами блоков коммутаторов 1. Первый вход блока 2 и второй вход блока 1 подключены к входу йт. выход блок я к-лм- му;атороп 1 гиецинен г входом С/тс... . ;: - моги преобразования :оордмнаi, я v/пл блока коммутаторов 2 r; Rходом начальных условий блок интегратор Выход блока 3 прямого п.реобразог -г.мч ординат соединен , с перемни в одоь 1 fW -; суммирования 4 м ijo вторым - ;.: - коммутаторов 2, Вход задания скор;г - менения переменных / соединен . ма ионным входом блока инте рат.дю,- выход которого соединен со входов. ния начальных словим блока иптегр
6 И СО ВТОрЫИ ВХОДОМ СуИМИрО- r .fv.1
4, выход которого соединен с, состретг.. к . щим входом блока ь умножения на no : r i ; ную матрицу, выход которого соедин- 1 информационным входом блока инте. лам.: ров 6. Выход олокэ п соединен с не,;. входом блока коммутаторов 1 и ЯР ..:,.- выходом устройстья.
КтАДЫЙ t iS 6flJKOB I . 2 СОСТОИТ ИЗ ; .,ч ;/ ;- кового числа дву::: знальных .:. rn;.-i.-,8 аналоговых сигналов. Их число pan не. :ic,;v. компонент векторов f и X, соответсг. ujopHMPHblx углов манипулятора и угольных координат его конца. Комм /гп;о- poi могут быть реа- Нлзовакы на микро.че;.-Н . КР590КИ7, в од.-юм корпусе которой IMMOCT ся четыре однокг нальных коммутатора : оо- щим управлением, которые мс:к использовать v- л /i,of, дэухканальных кочм/ татора.
Интегратбр. Опоков 6, 7 выполне ::. по известной схеме на основе операцию,it. усилителя с конденсатором в цепи связи и переключателями на информ&. /ю;1 ном входе и входе начальных услов:..л. с общим управляющим сигналом. В ка .о ч переключателей может быть применен,., .,-; х,:- микросхеме КР590КН7, что и в блоках ;. 2.
Блок 3 прямого гфеобразования ,:.сординат может быть выполнен как покдза;:о на фиг.З, Елок преобразует угловые коср.-л1 - наты в прямоугольные.
Устройство работает следующим г,-.: зом.
В зависимости о; уровней первого и второго логических сигналов Р1 v. P2 ГУ., .:- .- зуготся четыре режима работы устроив- два подготовительных при низком ур. с сигнала Р1 и два рабочих при высоко- : ; В подготовительных режимах С /пово 5 i;:y- ;
поп Ri Kn«vf..-i при 4iriM ооуществпяптся Г огл.тг. -Ьг.рмируемых устройством пргграммных значений и. йрнирных пере- Mf- t iHwx :, текущим положением ма ипулято- ра В рабочих режимах г кпючается силовой привод и осуществляется управление мзни- г ч/1Ятпрпм по гкопостям шар- ,.;: : -v с ,,и о. iч7р1 :че;-:н - .
.Тр j ; р;- Г .:-йй Ч .-7 .rjy .1Г1 уСТ- рм ло ТВ I ,..,;. f,,-t5OT чтдлл- НЫ/ SilOKCB
; р- рч.ч1 .-.;х комр-и- -- -,...-qx (j-nv-anoe Р1 и Р2 ,| ; :г.н;«е ;.. гяб;.|ей ,.с д,. г блоков
. , . 1 2 . :.1ЯМ HOf- f: КОММутмр,,
i- 1-.-ол-д г.,и дни чэждого из бло- к ;. , . 7 r, -хо/ ; г лгется тот,
.:Ьоз11 р.ерунг; стрелкой на
Д.гк; бпОКПВ ЫН it.; рйТОПОВ 6 7укЗЗЭНЫ
р,: i.iri ,1 м ;нгегр ;юванир (ИНТ)
i i -..:.. ням |Ь;Ч х ус.ювий (HVJ. Знаком : iг. -чютс бпо1 и. когопые в данном ра- -1. . -:: ,-п.| устройства несущостве ны.
Г 0 i ни .ч .. на зходах Р1 и Р2 :i:vi (i |окч интеграторов находятся Б режи- : .. - i -::.-.( чтч5;иных сговип анары о- ;;. :;лв -;е1-1та И 9 форкмчпуется низкий v,.о: HI-. оторый обеспечивав подключо- 1 о i; Го)хс- дям блоков коммутаторов 1, 2 их ь .в. е- .сдов Пои ::юм сигналы 7Т теку- i.M,.if; г1.1, манипулятора
-. б;: о к j Oi iwvTato io поступают на п.-гд.. н--5чс-л1 KStx ,т:,.w блсж мнтеграто; .: И уО ЛН П.ЛИВЗИТТСР (С ОбОЭТИЫМ ЗНЭ1 гч.-,) на его иы/.одчх. Ь а выходе блока i ;; v- i:;-. i о р :. О Ф о р г i и р v юте я сигнал
.:.-, пг . -,грамг. значении ;to/ioxfjHHn njap- ч чр(.ь. coBrianai-.v.uue с (7т . В таком режиме
; s.f.: .j с-:ло чч приводов манипулятора
i : . U ,:.. i CfO Г|еУЯ еЩ :ЧИ О ИЗ ИСХОДНОГО . лУНИЯ.
iiH появлении ль сокого уровня сигнала Р1 . мизк ..м Р .1 бпо интеграторов 7
Ч .: Г. х.-;.,.; в peXi. iM ИНТеГрИрСОЗ ИЛ1. СИГНЭ;;:.. V : - .чают сгоо -стн изменем -;-: шарнир- к.,:ч п решенных. На выходах блока el. ;,;..р--;от,я (с, томностью до знака) прс- . оам- .ные .энзчения шарнирных еремцн- :,: . .nopi .:ie -( входы начаг ных -,;, jf-i-in блока и: тстраторов 6 проходят чз ;: . ч.трпйсгвз.
npi. низко- уровне сигнала Р1 и высо- i- ON Р2 осуществляется подготовка к работ манип/.ттором о декартог.ых координатах. На управляющий вход бпокоо комму;а- Topoj 1, с выхода элемента И 9 поступает сигнал высокого уров;-:я. При этом сигиг.пы
манипуляторг гл через блок к/мугаторов i проходят на ьходы блок 1 прямого преобразования координат 3, на 1.;ыхо.п.ях котооого формируются соответствующие им декартовы координаты Хт, которые через блок коммутаторов 2 проходят на входы начальных условий блока интеграторов 7. В результате на выходах блока интеграторов 7 формируются значения декартовых координатах, соответствующие текущему положению манипулятора. Режим работы блока 6 в этом случае не является существенным, так как силовые приводы выключены.
При появлении высокого уровня сигнала Р1 и высоком Р2 сигналы V воспринимаются как скорости изменения декартовых координат, на выходах блока 7 формируются программные значения декартовых координат, которые, в свою очередь, поступают на входы блока сумматоров 4. Блок коммутаторов 1 соединяет выходы блока б со входами блока прямого преобразования координат 3. В этом случае блоки 3-6 образуют структуру, совпадающую со структурой устройства-прототипа, вычисляющего вектор СЕп по заданному вектору Хп. После переходного процесса на выходах интеграторов 6 формируются сигналы 3д , соответствующие сигналам , а значит, совпадающие в начальный момент сат, так как в предшествующем подготовительном режиме сигналы вычислялись поат. После этого возможно включение исполнительных следящих систем манипулятора, Время установления сигналов на выходах интеграторов б зависит от их коэффициентов передачи и может быть сделано весьма малым (в пределах десятков микросекунд), Сходимость выходных сигналов к величинам «п обеспечивается в заданных пределах их изменения надлежащим выбором постоянной матрицы, на которую в блоке 5 умножается вектор рассогласования ДХ,
Предлагаемое устройство при изменении размерности векторов а, X и формул (1). а, соответственно, блоков 3,5. позволяет организовать управление манипуляторами с разпичным числом степеней подвижности. Если это число равно трем, то величины X могут задавать декартовы координаты рабочей точки манипулятора, если число степеней подвижности равно шести, то X могут задавать координаты рабочего органа и его ориентацию в неподвижной системе координат. Легко может быть осуществлено управление частью степеней подвижности по
декартовым скоростям, а частью нирным.
по шарФормула изобретения
Устройство для управления манипулятором по вектору скорости, содержащее блок прямого преобразования координат, блок суммирования, блок умножения на постоянную матрицу, первый блок интеграторов, выход которого является выходом устройства, а информационный вход подключен к выходу блока умножения на постоянную матрицу, вход которого подключен к выходу блока суммирования, первый вход
которого подключен к выходу блока прямого преобразования координат,о тличающе- е с я тем, что, с целью расширения функциональных возможностей за счет обеспечения управления по декартовым и шарнирным переменным и введения режима согласования выходных сигналов с текущими, дополнительно введены первый и второй блоки коммутаторов, второй блок интеграторов, элемент И, элемент НЕ, вход которого подключей к управляющему входу второго блока интеграторов и является первым входом режима работы устройства, а выход - к первому входу элемента И, второй вход которого подключен к управляющему входу
первого блока интеграторов и является вторым входом задания режима работы устройства, а выход соединен с управляющими зходами первого и второго блоков коммутаторов, выходы которых подключены соответственно к входу блока прямого преобразования координат и к входу задания начальных условий второго блока интеграторов, выход которого подключен к второму входу блока суммирования и к входу задания начальных условий первого блока интеграторов, а информационный вход является входом задания скорости изменения переменных устройства, выход первого блока интеграторов подключен к первому
информационному входу первого блока коммутаторов, второй информационный вход которого подключен к первому информационному входу второго блока коммутаторов и является входом текущего
положения шарниров манипулятора устройства, второй информационный вход первого блока коммутаторов подключен к выходу блока прямого преобразования координат.
г
я
| название | год | авторы | номер документа |
|---|---|---|---|
| Система супервизорного управления шагающего аппарата | 1989 |
|
SU1634488A1 |
| Многофункциональный преобразователь | 1985 |
|
SU1267443A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Устройство для деления | 1990 |
|
SU1746378A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
| Устройство для деления | 1990 |
|
SU1728860A1 |
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
Изобретение относится к аналоговой вычислительной технике и может найти применение в системах управления манипуляторов и робототехнических систем. Цель изобретения - расширение функциональных возможностей за счет обеспечения управления по декартовым и шарнирным переменным, введения режима согласования выходных сигналов с текущими. Устройство содержит первый и второй блоки коммутаторов 1,2, блок прямого преобразования координат 3, блок суммирования 4, блок умножения на постоянную матрицу 5, первый и второй блоки интеграторов 6, 7, элемент НЕ 8, элемент И 9. Введение первого и второго блоков коммутаторов, второго блока интеграторов, элемента И и элемента НЕ позволяет достичь поставленную цель при малых аппаратурный затратах. 3 ил., 1 табл. СЛ С
. -
fUcr .
77
12
фаг.г
№«J
| Систма управления дистанционным манипулятором | 1976 |
|
SU633725A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Спецвычислитель для преобразования координат в системе управления искусственной конечностью, - проспект ВДНХ СССР, 1981, | |||
