(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИГАТЕЛЯ


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
| Следящая система | 1987 |
|
SU1499315A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| СПОСОБ КАСКАДНОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА ТЕПЛОЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 1991 |
|
RU2049290C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |

1
Изобретение относится к устройствам регулирования неэлектрических величин, в частности к автоматическому регулированию скорости вращения дви1ателя внутреннего сгорания.
Известна система для стабилизации скорости вращения двигателя, содержащая последовательно соединенные сравнивающий элемент, усилитель, двигатель и датчик скорости, датчик опорных импульсов, последовательно соединенные генератор импульсов, счетчик импульсов, запоминающее устройство, преобразователь код-напряжение, звено с переменным коэффициентом усиления, второй вход которого псяключен к выходу датчика скорости, а выход - к парному входу сравнивающего элемента.
Ко второму входу сравнивающего элемента подключен первый вход датчика опорных импульсов, второй вход которого подключен к выходу двигателя, а выход - ко второму входу счетчика импульсов 1.
Однако обеспечение стабильности при возмущении на систему изменением нагрузки на двигателе осуществляется с большой динамической ошибкой и временем переходного процесса, так
как система имеет линейный пропорциональный закон регулирования на каждом установившемся скоростном режи- . ме, который не обеспечивает оптимальной величины управляющего сигнала.
Увеличение динамической ошибки и времени переходного процесса ведет к ухудшению качества регулирования при возмущении по нагрузке на двига0тель .
Наиболее близкой по технической сущности к предлагаемой является электронная двухимпульсная система автоматического регулирования часто5ты вращения дизель-генератора, содержащая последовательно соединенные исполнительный механизм, двигатель и датчик скорости, выход которого подключен к первому входу элемента
0 сравнения непосредственно и через дифференцирующее звено, второй и третий входы элемента сравнения соответственно соединены с задатчиком скорости и выходом формирователя им5пульса нагрузки, вход которого подключен к выходу измерителя мощности, например измерителя активной мощности генератора, а выход элемента сравнения соединен со входами усилителя, 0 который содержит пропорциональный и
интегрирующий каналы, включенные параллельно и подсоединенные к выходу усилителя так, чтобы получить сумму сигналов обоих каналов, которая управляет исполнительным механизмом 2
Однако известное устройство обладает низкой точностью.
Цель изобретения - повышение точности устройства.
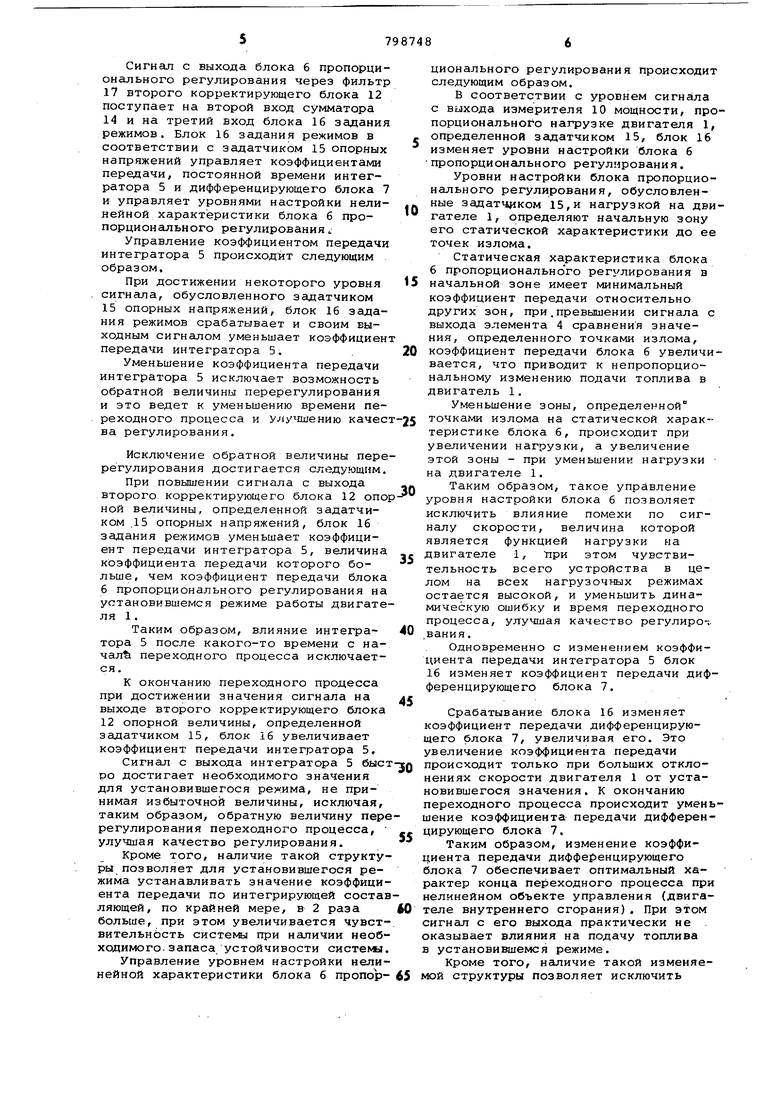
Поставленная цель достигается тем что в устройство для регулирования скорости двигателя, содержащее датчи скорости, первый корректируквдий блок и элемент сравнения, выход которого подключен ко входам интегратора,блока пропорционального регулирования и дифференцирующего блока, второй вход - к выходу задатчика скорости, а третий вход через преобразователь импульса нагрузки - к выходу измерителя мощности, а также исполнительный механизм, введены дополнительные корректирующие блоки, сумматор и последовательно соединенные задатчик опорных напряжений и блок задания режимов, причем второй вход блока задания режимов подключен к выходу измерителя мощности, а первый, второй и третий выходы - соответственно ко вторым входам интегратора, блока пропорционального регулирования и дифференцирующего блока, выход интегратора соединен с первым входом сумматора, блока пропорционального регулирования соединен через второй корректирующий блок с третьим входом блока задания режимов и вторым входом сумматора,выход дифференцирующего блока соединен через третий корректирующий блок с третьим входом сумматора, выход которого подключен ко входу исполнительного механизма, а четвертый и пятый выходы блока задания режимов подключены соответственно ко второму и третьему входам каждого корректирукедего блока На чертеже представлена структурная схема предлагаемого устройства.
Устройство для регулирования скорости двигателя 1, содержащее датчик 2 скорости, первый корректирующий блок 3 и элемент 4 сравнения, выход которого подключен ко входам интегратора 5, блока 6 пропорционального регулирования и дифференцирующего блока 7, второй вход - к выходу задатчика 8 скорости, а третий вход через преобразователь 9-импульса нагрузки - к выходу измерителя 10 мощности, а также исполнительный механизм 11, содержит также дополнительные корректирующие блоки 12 и 13, сумматор 14 и последовательно соединенные эадатчик 15 опорных напряжений и блок 16задания режимов, приче второй вхац блока 16 задания режимов подключен к выходу измерителя 10 мощности, а первый, второй и третий выходы - соответственно ко вторым входам интегратора 5, блока б пропорционального регулирования и дифференцирующего блока 7, выход интегратора 5 соединен с первым входом сумматора 14, выход блока 6 пропорционального регулирования соединен через второй корректирующий блок 12 с третьим входом блока 16 задания режимов и вторы входом сумматора l4, выход дифференцирующего блока 7 соединен через третий корректирующий блок 13 с третьим входом сумматора 14, выход которого подключен ко второму входу исполнительного механизма 11, а четвертый и пятый выходы блока 16 задания режимо подключены соответственно ко второму и третьему входам каждого корректирующего блока 3, 12 и 13. Каждый корректирующий блок 3 (12,13) включает себя фильтр 17 и форсирующий элемент 18, подключенные к соответствующим входам,элемента 19 суммирования, причем выход элемента 19 суммирования является выходом корректирующего блока 3 (12,13), первые входы фильтра 17 и форсирующего элемента 18 являются первыми входами корректирующего блока 3 (12,13), второй вход фильтра 17 является вторым входом корректирующего блока 3 (12, 13), а второй вход формирующего элемента 18 является третьим входом корректирующего блока 3 (12, 13).
Устройство для регулирования скорости двигателя работает следующим образом.
Сигнал задания скорости двигателя 1 поступает с задатчика 8 на второй вход элемента 4 сравнения. На его второй вход поступает через фильтр 17 и элемент 19 суммирования первого корректирующего блока 3 сигнал с датчика 2 скорости.
При изменении нагрузки на третий вход элемента 4 сравнения также поступает сигнал с преобразователя 9 импульса нагрузки.
Сигнал рассогласования между заданным и действительным значением скорости и сигналом, формирующимся при изменении нагрузки с выхода элемента 4 сравнения поступает на интегратор 5, блок б пропорционального регулирования и дифференцирующий блок 7,
С выхода интегратора 5 сигнал поступает на первый вход сумматора 14, На его второй вход поступает сигнал через фильтр 17 второго корректирующего блока 12 с блока б пропорционального регулирования, а на его третий вход сигнал поступает с дифференцирующего блока 7 через фильтр 17 третьего корректирующего блока 13
Управляющий сигнал с сумматора 14 воздействует на исполнительный механизм 11, который управляет подачей топлива двигателя 1. Сигнал с выхода блока 6 пропорционального регулирования через фильтр 17 второго корректирующего блока 12 поступает на второй вход сумматора 14и на третий вход блока 16 задания режимов. Блок 16 задания режимов в соответствии с задатчиком 15 опорных напряжений управляет коэффициентами передачи, постоянной времени интегратора 5 и дифференцирующего блока 7 и управляет уровнями настройки нелинейной характеристики блока б пропорционального регулирования Управление коэффициентом передачи интегратора 5 происходит следующим образом. При достижении некоторого уровня сигнала, обусловленного задатчиком 15опорных напряжений, блок 16 задания режимов срабатывает и своим выходным сигналом уменьшает коэффициен передачи интегратора 5. . Уменьшение коэффициента передачи интегратора 5 исключает возможность обратной величины перерегулирования и это ведет к уменьшению времени переходного процесса и улучшению качес на регулирования. Исключение обратной величины пере регулирования достигается следующим. При повышении сигнала с выхода второго корректирующего блока 12 опо ной величины, определенной задатчиком .15 опорных напряжений, блок 16 задания режимов уменьшает коэффициент передачи интегратора 5, величина коэффициента передачи которого больше, чем коэффициент передачи блока 6 пропорционального регулирования на установившемся режиме работы двигате ля 1. Таким образом, влияние интегратора 5 после какого-то времени с начале переходного процесса исключается. К окончанию переходного продесса при достижении значения сигнала на выходе второго корректирующего блока 12 опорной величины, определенной задатчиком 15, блок 16 увеличивает коэффициент передачи интегратора 5, Сигнал с выхода интегратора 5 быс ро достигает необходимого значения для установившегося режима, не принимая избыточной величины, исключая, таким образом, обратную величину пер регулирования переходного процесса, улучшая качество регулирования. Кроме того, наличие такой структу ры позволяет для установившегося режима устанавливать значение коэффици ента передачи по интегрирующей соста ляющей, по крайней мере, в 2 раза больше, при этом увеличивается чувст вительность системы при наличии необходимого, запаса устойчивости системл Управление уровнем настройки нели нейной характеристики блока 6 пропорционального регулирования происходит следующим образом. В соответствии с уровнем сигнала с выхода измерителя 10 мощности, пропорционального нагрузке двигателя 1, определенной задатчиком 15, блок 16 изменяет уровни настройки блока 6 пропорционального регулирования. Уровни настройки блока пропорционального регулирования, обусловленные задатчнком 15,и нагрузкой на двигателе 1, определяют начальную зону его статической характеристики до ее точек излома. Статическая характеристика блока 6 пропорционального регулирования в начальной зоне имеет минимальный коэффициент передачи относительно других зон, при.превышении сигнала с выхода элемента 4 сравнения значения, определенного точками излома, коэффициент передачи блока 6 увеличивается, что приводит к непропорциональному изменению подачи топлива в двигатель 1. Уменьшение зоны, определенной точками излома на статической характеристике блока 6, происходит при увеличении нагрузки, а увеличение этой зоны - при уменьшении нагрузки на двигателе 1. Таким образом, такое управление уровня настройки блока 6 позволяет исключить влияние помехи по сигналу скорости, величина которой является функцией нагрузки на двигателе 1, Тхри этом чувствительность всего устройства в целом на всех нагрузочных режимах остается высокой, и уменьшить динамическую ошибку и время переходного процесса, улучшая качество регулиро,вания. Одновременно с изменением коэффициента передачи интегратора 5 блок 16 изменяет коэффициент передачи дифференцирующего блока 7. Срабатывание блока 16 изменяет коэффициент передачи дифференцирующего блока 7, увеличивая его. Это увеличение коэффициента передачи происходит только при больших отклонениях скорости двигателя 1 от установившегося значения. К окончанию переходного процесса происходит уменьшение коэффициента передачи дифференцирующего блока 7. Таким образом, изменение коэффициента передачи дифференцирующего блока 7 обеспечивает оптимальный характер конца переходного процесса при нелинейном объекте управления (двигателе внутреннего сгорания). При этом сигнал с его выхода практически не оказывает влияния на подачу топлива в установившемся режиме. Кроме того, наличие такой изменяеой структуры позволяет исключить
влияние дифференцирующего блока 7 на установившемся режиме, что приводит к уменьшению разброса по цикловой подаче топлива и увеличению запаса устойчивости системы в целом.
Управление интегратором 5 и дифференцирующим блоком 7 увеличивает быстродействие системы в целом и обеспечивает переходный процесс по оптимальной траектории, т.е. без обратной величины перерегулирования. Все это улучшает качество регулирования .
Фильтры 17 включаются блоком 16 Йри значениях сигналов с выхода блокё 6 пропорционального регулирования или измерителя 10 мощности, превышающих заданные опорные величины, и выключаются при значениях сигнала менее опорных величин или через интервал времени, заданный в блоке Ifi, при определенной величине перепада нагрузки.
Выходные сигналы блока 16 изменяют коэффициенты передачи и постоянны времени фильтров 17.
Уменьшение коэффициентов передачи фильтров 17 и форсирующих элементов 18 или их исключение из структуры устройства, происходит по сигналу с блока 6 пропорционального регулирования.
С другой стороны,форсирующие устройства 18 осуществляют дополнительное формирование или увеличение скорости по цикловой подаче топлива, чт соответственно, уменьшает динамическую ошибку и время переходного процесса, улучшая качество регулирования.
Таким образом, блок 16, изменяя коэффициенты передачи интегратора 5, блока 6 пропорционального регулирования и дифференцирующего блока 7, и управляя корректирующими блоками 3, 12 и 13,формирует сигнал воздействия оптимального значения на исполнительный механизм 11 максимально быстро.
В результате, пре.длагаемое устройство может быть инвариантным ; (не зависящее от возм:/щения) во всем диапазоне изменения нагрузок, что увеличивает сферу применения такого регулятора и устраняет необходимость разработки ряда регуляторов не только для различных двигателей внутреннего сгорания, но и для регуляторов близких по назначению для других объектов регулирования.
Формула изобретения
Устройство для регулирования скорости двигателя, содержащее датчик скорости, первый корректирующий блок и элемент сравнения, выход которого подключен ко входам интегратора, блока пропорционального регулирования и дифференцирующего блока, второй вход - к выходу задатчика скорости, а третий вход через преобразователь импульса нагрузки - к выходу измерителя мощности, а также исполнительный механизм, отличающееся тем, что, с целью повышения точности устройства, в него введены дополнительные корректирующие блоки, сумматор и последовательно соединенные задатчик опорных напряжений и блок задания режимов, причем второй вход блока задания режимов подключен к выходу измерителя мощности, а первый, второй и третий выходы - соответственно ко вторым входам интегратора, блока пропорционального регулирования и дифференцирующего блока, выход интегратора соединен с первым входом сумматора, выход блока пропорционального регулирования соединен через второй корректирующий блок с третьим входом блока задания режимов и вторым входом сумматора, выход дифференцирующего блока соединен через третий корректирующий блок с третьим входом сумматора, выход которого подключен ко входу исполнительното механизма, а четвертый и пятый выходы блока задания режимов подключены соответственно ко второму и третьему входам каждого корректирующего блока.
Источники информации, принятые во внимание при экспертизе
Q частоты вращения дизель-генератора. Реф. сб. Двигатели внутреннего сгорания . Изд-во НИИИНФОРМТЯЖМАШ, 4-76-20, с. 1-4 (прототип).
