Способы биоэлектрического управления протезно-ортопедическими устройствами известны.
Предлагаемый способ отличается от известных тем, что .при использовании минимального числа источников сигналов, например одного, после прекращения управления одним механизмом автоматически меняется объект управления.
В основе предлагаемого способа лежит тот факт, что часто одновременно реализовать два сигнала невозможно. Примером может служить управление реверсивными движениями: после захвата предмета кистью следует раскрытие кисти. Другой пример - управление переключающим устройством: после включения устройства следует выключение.
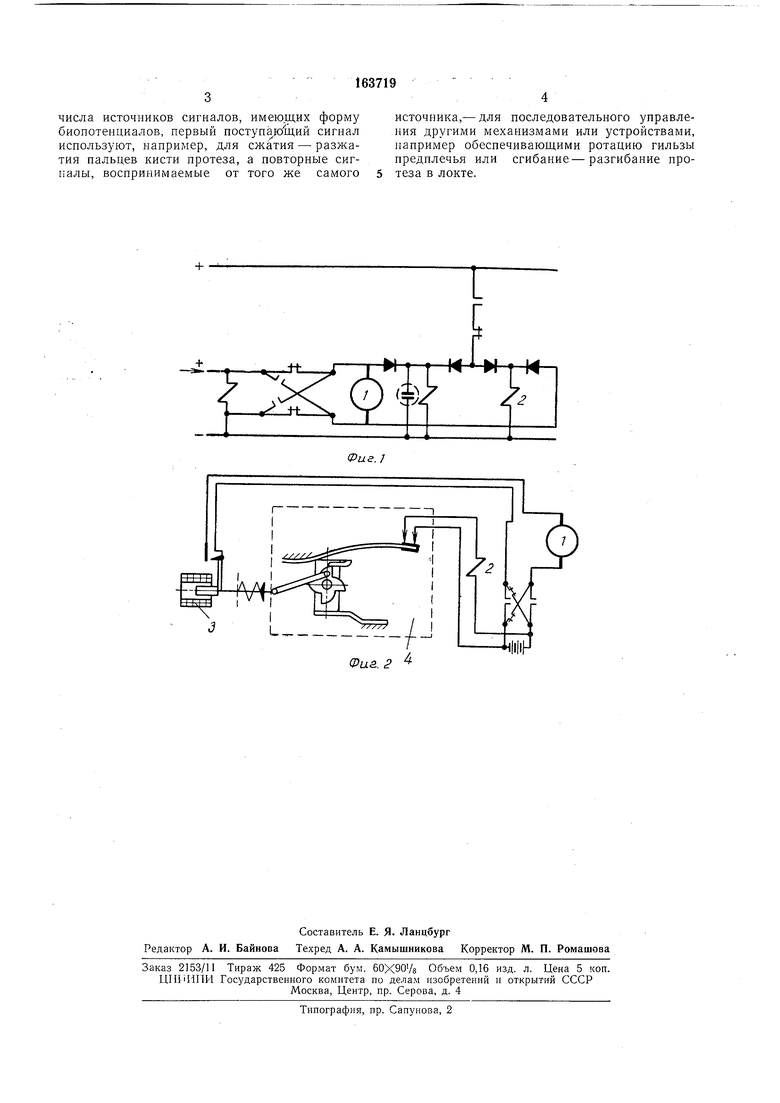
На фиг. 1 и 2 изображены принципиальные схемы двух вариантов осуществления предлагаемого способа.
Управление от одного источника сигналов возможно по схеме, представленной на фиг. 1. При помощи биопотенциалов управляетсяэлектродвигатель / постоянного тока. После включения и последующего выключения электродвигателя срабатывает реле реверса 2, которое при повторном включении электродвигателя / заставляет вращаться его в обратном направлении.
Таким образом, протезом кисти можно управлять не от двух источников, как обычно, а от одного.
В качестве варианта может быть также использована схема с механическим переключателем (см. фиг. 2). При включении электромагнита 3 включается электродвигатель /; при этом собачка переключателя 4 не удерживается упором и переключения не происходит. При выключении же электромагнита 3 переключатель 4 срабатывает и заставляет реле реверса 2 включаться или выключаться.
Таким образом, первый поступающий сигнал может быт;ь использован для управления одним механизмом, например механизмом сжатия - разжатия протеза кисти, а повторные сигналы от того же источника - для управления другими механизмами, например обеспечивающими ротацию гильзы предплечья или сгибание - разгибание протеза в локте.
Предмет изобретения
25
числа источников сигналов, имею.щих форму биопотеициалов, первый поступаюЩий сигнал используют, например, для сжатия - разжатия пальцев кисти протеза, а повторные сигналы, воспринимаемые от того же самого
источника,- для последовательного управления другими механизмами или устройствами, например обеспечивающими ротацию гильзы предплечья или сгибание-разгибание протеза в локте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез плеча | 1989 |
|
SU1732967A1 |
| Многофункциональный активный протезРуКи | 1979 |
|
SU806022A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Многофункциональный активный протез руки | 1980 |
|
SU973121A1 |
| Устройство для управления биоэлектрическими протезами | 1987 |
|
SU1456140A1 |
| Стенд для испытания механизмов протезов верхних конечностей | 1977 |
|
SU626776A1 |
| Активный протез плеча | 1962 |
|
SU471891A1 |
| Устройство для управления многофункциональным протезом | 1987 |
|
SU1475652A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ БИОЭЛЕКТРИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ | 1967 |
|
SU196249A1 |
Фаз.. 2
