В известных системах пространственной стабилизации, в которых на следящей платформе установлены однокомионентные гиростабилизаторы, томность гиростабилизаторов повышается применением корректирующих средств в усилителях следящих систем платформы или применеиием безредукториых приводов карданных колец платформы. Существо отмеченных способов повыщеиия точности заключается в том, что они направлены на уменьшение амплитуды качаиий следящей платформы.
Корректирующие средства в усилителях следящих систем платформы затрудняют изготовление платформы с высокой степенью стабилизации. Также трудио сделать следящие системы трехосного карданного подвеса безредукторными и малоинерционными, вследствие чего гироскопы оказываются подверженными воздействию угловых вибраций основания ирибора. Это создает дополнительную нагрузку на опоры и вызывает дополнительный дрейф гироскопа.
Предлагаемая трехосиая платформа, стабилизированная в пространстве с помощью следящих систем и трех однокомпонентных поплавковых гиростабилизаторов, расположенных на этой платформе, отличается тем. что каждый гиростабилизатор установлен на платформе с помощью индивидуальиого карданного кольца, виутреиняя ось которого совпадает с осью стабилизации, в внешняя ось ориентирована вдоль оси фигуры гиростабилизатора, причем карданное кольцо снабжено дополнительной безредукторной прецизионной следящей системой. При установке гиростабилизатора не непосредственно на следящей платформе, а на карданном кольце угловые качания платформы не будут воздействовать на гиростабилизатор, так как они не будут восприняты карданным кольцом.
Дополнительная следящая система, установленная на внешней оси кольца и состоящая из датчиков угла, сумматора сигналов, усилителя и датчика момента, удерживает ось стабилизации каждого гидростабилизатора в иоложении, определенном относительно плоскости стабилизации смежного гиростабилизатора.
Такая конструкция платформы уменьшает влияние на гиростабилизаторы угловых колебаний платформы при качке и вибрацию ее основания.
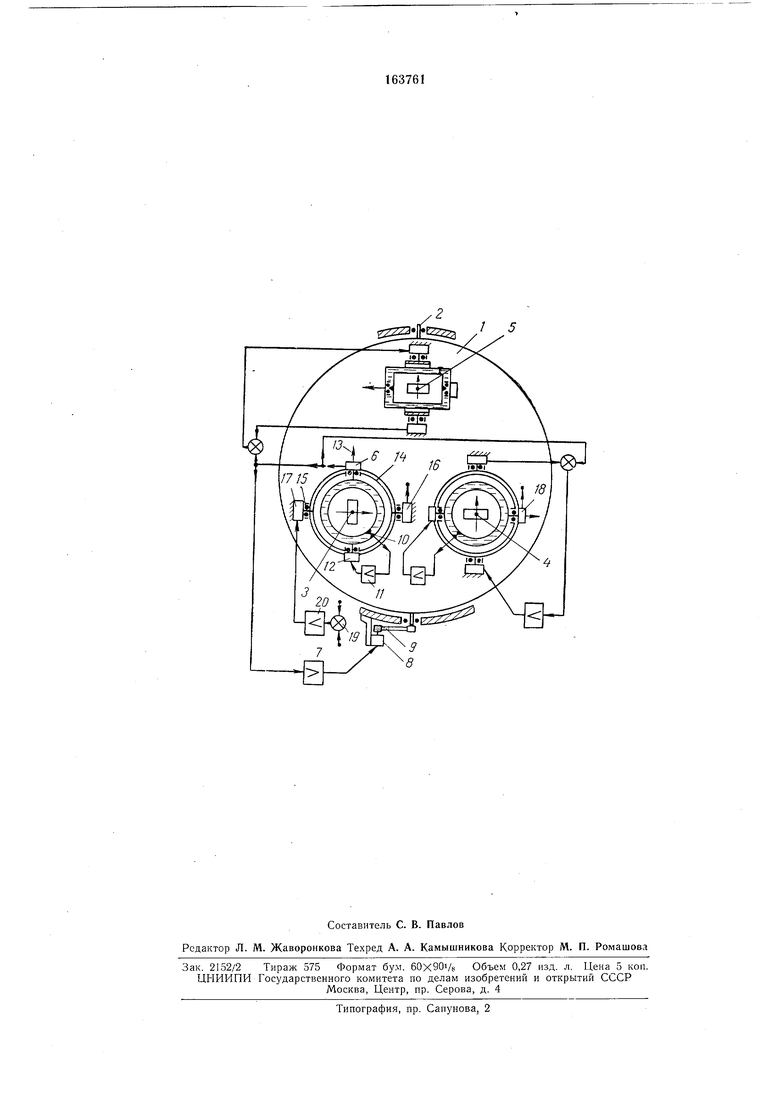
На чертеже схематично изображена трехосная платформа, стабилизированная в пространстве, вид сверху.
установлены поплавковые гидростабилизаторы 3, 4 и 5.
Плоскость платформы удерживается в заданном положении с помощью следящей системы, состоящей из датчика угла 6, усилителя 7 и исполнительного двигателя 8, связаиного с осью платформы через редуктор 9.
Каждый из поплавковых гироскопов гиростабилизаторов 3, 4, 5 снабжен системой межрамочной коррекции. Система межрамочной коррекции каждого гироскопа состоит из датчика угла /6 на оси процессии, усилителя// и датчика момента 12. Гироскоп с системой межрамочной коррекции образует однокоыпонентный гиростабилизатор, обладающий свойством сохранять определенное значение абсолютной угловой скорости поворота плоскости стабилизации вокруг оси стабилизации 13. Гиростабилизатор установлен на индивидуальном карданном кольце 14. - Вследствие инерционности следящей системы платформы и наличия редуктора угловые вибрации основания прибора вокруг оси 2 неизбежно передаются платформе. Но от платформы на гиростабилизатор 3 эти вибрации не передаются, так как его ось стабилизации 13 установлена на подшипниках, а .датчик утла 6 и датчик момента 12 имеют безредукториую конструкцию и не создают увлечений гиростабилизатора 3 при поворотах платформы. Угловые качания платформы вокруг другой оси, перпендикулярной оси 2 (на чертеже не показана), также не передаются на гиростабилизатор 3, так как карданное кольцо 14 по внещней оси 15 установлено на подщипниках, а датчик угла 16 и датчик момента 17, расположенные на оси 15, имеют безредукторную конструкцию.
Для удержания индивидуального карданного кольца в положении, заданном относительно смежного гиростабилизатора 4, при наличии качаний платформы вокруг оси, перпендикулярной оси 2, применена дополнительная следящая система, состоящая из датчиков углов 16 и 18, сумматора сигналов 19, усилителя 20 и датчика момента 17, нейтрализующего воздействие на кольцо 14 случайных моментов вокруг оси 15.
Датчик угла 18 или /5-может иметь фиксированное или управляемое положение нуля. В первом случае ось стабилизации 13 гиростабилизатора 3 удерживается под углом 90° к плоскости стабилизации гиростабилизатора 4, а во втором случае под некоторым углом, измеряемым по управляющему закону.
Таким образом, ось стабилизации 13 гиростабилизатора 3 будет находиться в положеНИИ, определенном относительно плоскости стабилизации гиростабплизатора 4, с точностью до погрещности донолнительной следящей системы, независимо от погрешности следящих систем карданного подвеса платфор.мы. Точность дополнительной следящей системы может быть достаточно высокой, благодаря относительно малой механической нагрузке, создаваемой только одним гиростабилизатором, применению безредукторного
датчика момента 17 и малому диапазону отклонений, измеряемых датчиками углов 18 и 16. При этом требования к следящим системам карданного подвеса платформы могут быть пониженными.
Гиростабилизаторы, установленные на платформе с помощью индивидуального карданного кольца, обеспечивают более высокую точность. Гиростабилизаторы 4 v. 5 имеют конструкцию, аналогичную конструкции гиростабилизатора 3. Оси стабилизации гиростабилизаторов 3, 4 и 5 взаимно перпендикулярны.
Предмет изобретения
Трехосная платформа, стабилизированная в пространстве с помощью следящих систем и трех однокомпонентных поплавковых гиростабилизаторов, расположенных на этой платформе, отличающаяся тем, что, с целью уменьшения влияния на Гиростабилизаторы угловых колебаний платформы при качке и вибрации ее основания, каждый гиростабилизатор установлен на платформе с помощью
индивидуального карданного кольца, внутренняя ось которого совпадает с осью стабилизации, а внешняя ось ориентирована вдоль оси фигуры гиростабилизатора, причем карданное кольцо снабжено дополнительной безредукторной прецизионной следящей системой, установленной на внешней оси кольца и состоящей из датчиков угла, сумматора сигналов, усилителя и датчика момента, дополнительная следящая система удерживает ось
стабилизации каждого гиростабилизатора в, положении, определенном относительно плоскости стабилизации смежного гиростабилизатора.
/ 5
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1995 |
|
RU2131585C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Подвес трехосного гиростабилизатора киноаппарата | 1981 |
|
SU989321A1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| САМООРИЕНТИРУЮЩИЙСЯ В АЗИМУТЕ ТРЕХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2123664C1 |