Изобретение относится кизмеритель- нрй технике и может быть использовано для контроля угловых и линейных размеров оптических деталей.
Цель изобретения - расширение функциональных возможностей автоматизированного гониометра за счет обеспечения возможности контроля не только угловых, но и линейных размеров оптических деталей.
На фиг.1 представлена функциональная схема автоматизированного гониометра; на фиг.2 - узел базирования.
Автоматизированный гониометр (фиг.1) содержит основание 1, платформу 2. установленную на основании 1 с возможностью поворота, кольцевой лазер 3, скрепленный с платформой 2, фотоэлектрический автоколлиматор 4, установленный на основании 1, отражатель 5, скрепленный с платформой 2 так, что нормаль к нему при заданном угловом положении платформы 2 совпадает с оптической осью фотоэлектрического автоколлиматора 4, узел 6 базирования (фиг.2), выполненный в виде плиты с рядом отверстий 7, центры которых лежат на одной окружности А, и радиальных пазов 8, расположенных между каждыми соседними отверстиями, и скрепленный с платформой 2 так, что отверстия 7 лежат по разные стороны относительно оси поворота платформы 2, осветитель 9 и фотоэлектрические блоки 10 и 11, скрепленные с основанием 1 по разные стороны от узла б базирования так, что осветитель 9 оптически связан с одним из отверстий 7 узла 6 базирования при заданном положении платформы 2 и фотоэлектрическими блоками 10 и 11. преобразователи 12 и 13, входы которых подключены к выходам фотоэлектрических блоков 10 и 11 соответственно, блок 14 обработки, входы которого подключены к выходам фотоэлектрического автоколлиматора 4, кольцевого лазера 3 и преобразователей 12 и 13.
Контролируемые оптические детали, например, в виде сеток со штрихом 15 (фиг.2) устанавливают на узел 6 базирования так, чтобы штрих сетки, ширину которого необходимо измерять, совпадал с отверстием 7 в узле 6 базирования и при вращении платформы 2 пересекал оптиче- ские оси фотоэлектрических блоков 10 и 11.
Автоматизированный гониометр работает следующим образом.
Пучки лучей осветителя 9 проходят через отверстия в узле 6 базирования и попадают на фотоэлектрические блоки 10 и 11. При вращении платформы 2 одновременно с ней вращается узел 6 базирования и при
этом пучки лучей осветителя 9 будут модулироваться отверстиями 7 и радиальными пазами 8 узла 6 базирования, а также самой контролируемой деталью, например штрихом 15 сетки. Выходные сигналы с фотоэлектрических блоков 10 и 11 представляют собой последовательность групп импульсов, при этом количество групп импульсов соответствует количеству отверстий 7 в узле
6 базирования. В каждой группе импульсов с выхода фотоприемного блока 10 (фотоприемного блока 11) передний фронт первого импульса соответствует моменту to пересечения пучков лучей осетителя 9 радиального паза 8 узла 6 базирования, задний фронт первого импульса соответствует моменту ti1 (ti для фотоприемного блока 11) пересечения передней кромки штриха 15 контролируемой сетки пучков лучей осветителя 9, передний фронт второго импульса - моменту t2 (t2 для фотоприемного блока 11) пересечения задней кромки штриха 15 контролируемой сетки пучков лучей осветителя 9. Преобразователи 12 и 13 обеспечивают
формирование П-образных импульсов из импульсных сигналов с пологими фронтами на выходах фотоэлектрических блоков 10 и 11 соответственно, которые затем поступают на вход блока 14 обработки.
В блоке 14 обработки производится
измерение углов поворота платформы 2 , (pi и рз , соответствующих временным
интервалам n ti - ti
Г2 t2 - t /
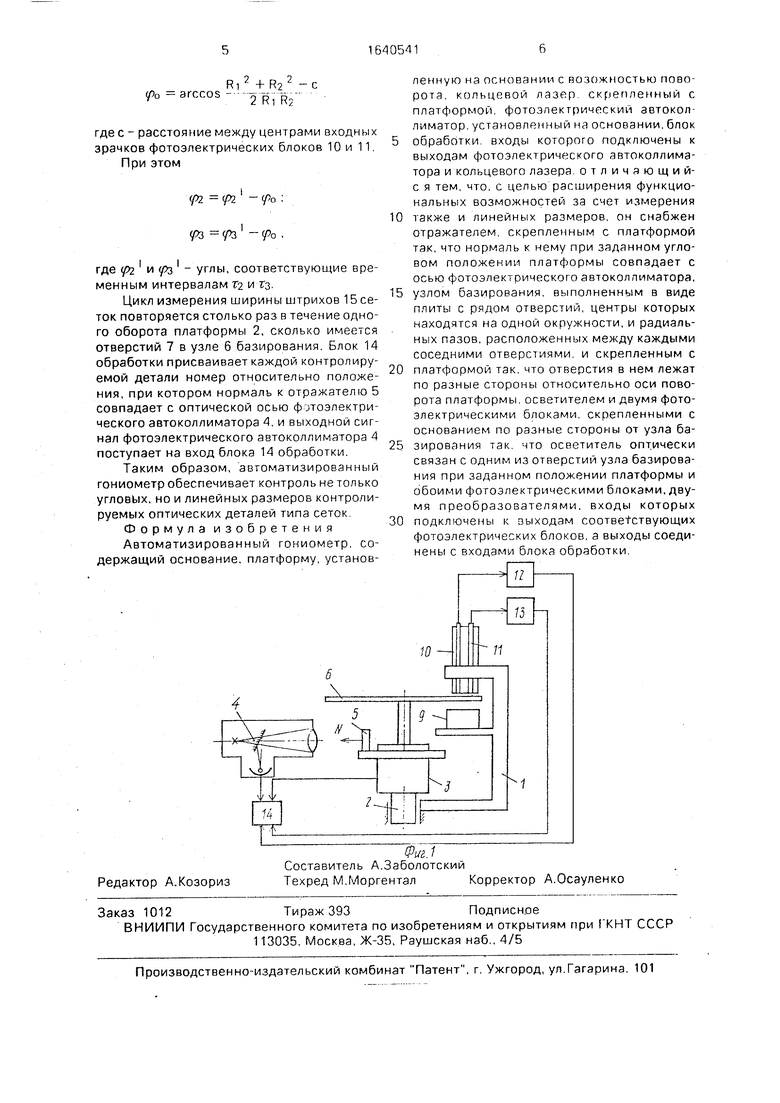
и гз - t2 - ti , путем заполнения этих временных интервалов импульсами, поступающими с выхода кольцевого лазера 3 на вход блока 14 обработки, а затем рассчитывается ширина b штриха 15 по формуле
h / R2Sin(03 +уЕ W ) о x Rz sin ()-Ri sin pi
R0
45
X --R2 sin (pi
Ri + R2 -2 Ri R2
где Ri - расстояние от оси поворота платформы 2 до центра входного зрачка фотоэлектрического блока 10:
R2 - расстояние от оси поворота платформы 2 до центра входного зрачка фотоэлектрического блока 11.
Эта формула справедлива для случая, когда центры входных зрачков фотоэлектрических блоков 10 и -11 и ось вращения платформы лежат на одной прямой.
При нарушении этого условия легко определить установочный угол (р0 из выражения
R, + R22 -c „ arccos- 2RVFV
где с - расстояние между центрами входных зрачков фотоэлектрических блоков 10 и 11 При этом
/Ј р2 - РО :
ЦЪ .
где (pi и ( углы, соответствующие временным интервалам Т2 и Гз
Цикл измерения ширины штрихов 15 сеток повторяется столько раз в течение одного оборота платформы 2, сколько имеется отверстий 7 в узле 6 базирования. Блок 14 обработки присваивает каждой контролируемой детали номер относительно положения, при котором нормаль к отражателю 5 совпадает с оптической осью ф ггоэлектри- ческого автоколлиматора 4. и выходной сигнал фотоэлектрического автоколлиматора 4 поступает на вход блока 14 обработки.
Таким образом, автоматизированный гониометр обеспечивает контроль не только угловых, но и линейных размеров контролируемых оптических деталей типа сеток
Формула изобретения
Автоматизированный гониометр, содержащий основание, платформу, установ4
Редактор А.Козориз
Фиг1 Составитель А.Заболотский
Техред М.МоргенталКорректор А.Осауленко
ленную на основании с возожностью поворота кольцевой лазер скрепленный с платформой фотоэлектрический автокод лиматор установленный на основании.блок
обработки входы которого подключены к выходам фотоэлектрического автоколлиматора и кольцевого лазера отличающий- с я тем, что, с целью расширения функциональных возможностей за счет измерения
также и линейных размеров, он снабжен отражателем, скрепленным с платформой так, что нормаль к нему при заданном угловом положении платформы совпадает с осью фотоэлектрического автоколлиматора,
узлом базирования, выполненным в виде плиты с рядом отверстий, центры которых находятся на одной окружности, и радиальных пазов, расположенных между каждыми соседними отверстиями и скрепленным с
платформой так, что отверстия в нем лежат по разные стороны относительно оси поворота платформы осветителем и двумя фотоэлектрическими блоками скрепленными с основанием по разные стороны от узла базирования так что осветитель оптически связан с одним из отверстий узла базирования при заданном положении платформы и обоими фотоэлектрическими блоками, двумя преобразователями, входы которых
подключены к зыходам соответствующих фотоэлектрических блоков, а выходы соединены с входами блока обработки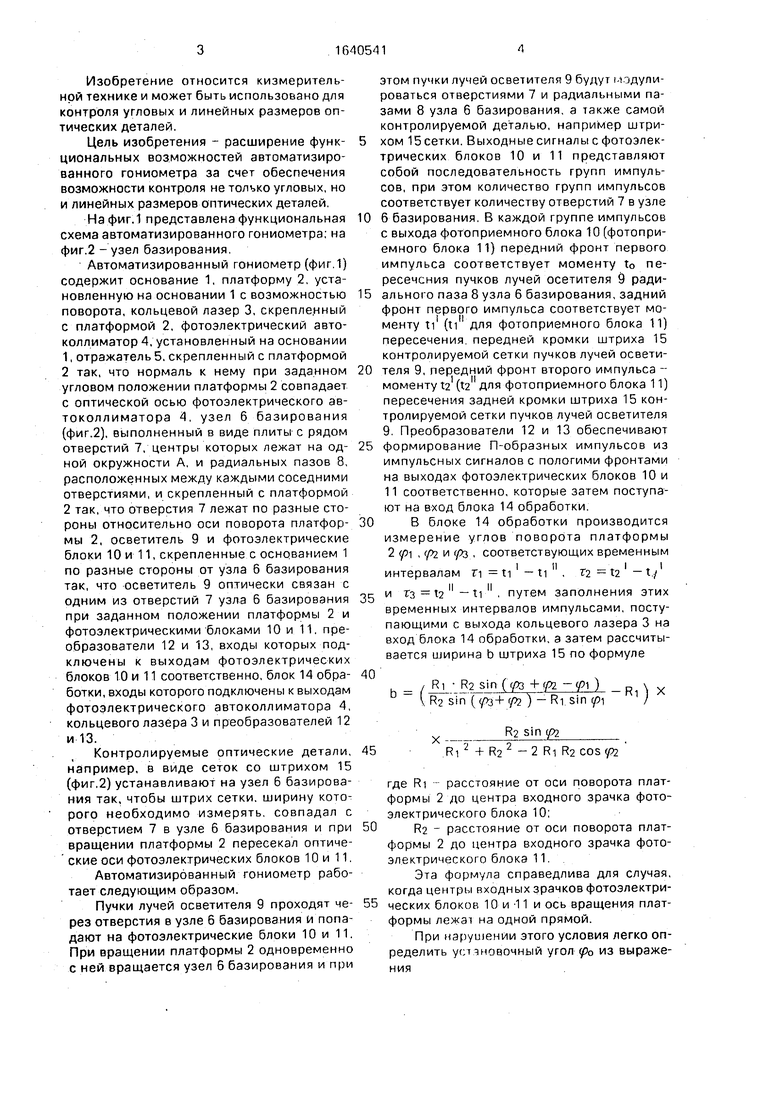
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический гониометр-спектрометр | 1987 |
|
SU1495642A1 |
| Устройство для измерения угла поворота вала | 1988 |
|
SU1696856A1 |
| Устройство для бесконтактного измерения профиля полированных поверхностей | 1983 |
|
SU1186942A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| Автоматизированный гониометр | 1982 |
|
SU1100500A1 |
| Устройство для измерения плоских углов многогранных призм | 1982 |
|
SU1221491A1 |
| Способ измерения углов между двумя отражающими поверхностями | 1987 |
|
SU1515038A1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| Устройство для измерения угла поворота вала | 1982 |
|
SU1281879A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля угловых и линейных размеров оптических деталей Целью изобретения является расширение функциональных возможностей автоматизированного гониометра за счет обеспечения возможности контроля не только угловых, но и линейных размеров оптических деталей. При вращении платформы одновременно с ней вращается узел 6 базирования, и при этом пучки лучей осветителя модулируются отверстиями 7 и радиальными пазами 8 узла 6 базирования, а также самой контролируемой деталью, например штрихом 15 етки Задний фронт первого импульса с выхода фотоприемного блока 10 (фотоприемного блока 11) соответствует моменту ti1 (ti для фотоприемного блока 11) пересечения пере дней кромкой штриха 15 контролируемой сетки пучков лучей осветителя, передний фронт второго импульса - моменту 12 ( для фотоприемного блока 11) пересечения задней кромкой штриха 15 контролируемой сетки пучков лучей осветителя В блоке обработки производится измерение углов поворота платформы 2 f) w рз соответствующих Г1 ti -И и временным интервалам Г2 12 - ty и гз 12 - ti путем заполнения этих временных интервалов импульсами, поступающими с выхода кольцевого лазера на вход блока обработки а затем рассчитывается ширина штриха 15 сетки Цикл измерения ширины штрихов 15 сеток повторяется столько раз в течение одного оборота платформы, сколько имеется отверстий 7 в узле 6 базирования Блок обработки присваивает каждой контролируемой детали номер относительно положения при котором нормаль к отражателю совпадает с оптической осью фотоэлектрического автоколлиматора и выходной сигнал фотоэлектрического автоколлиматора поступает на вход блока обработки 2 ил О ел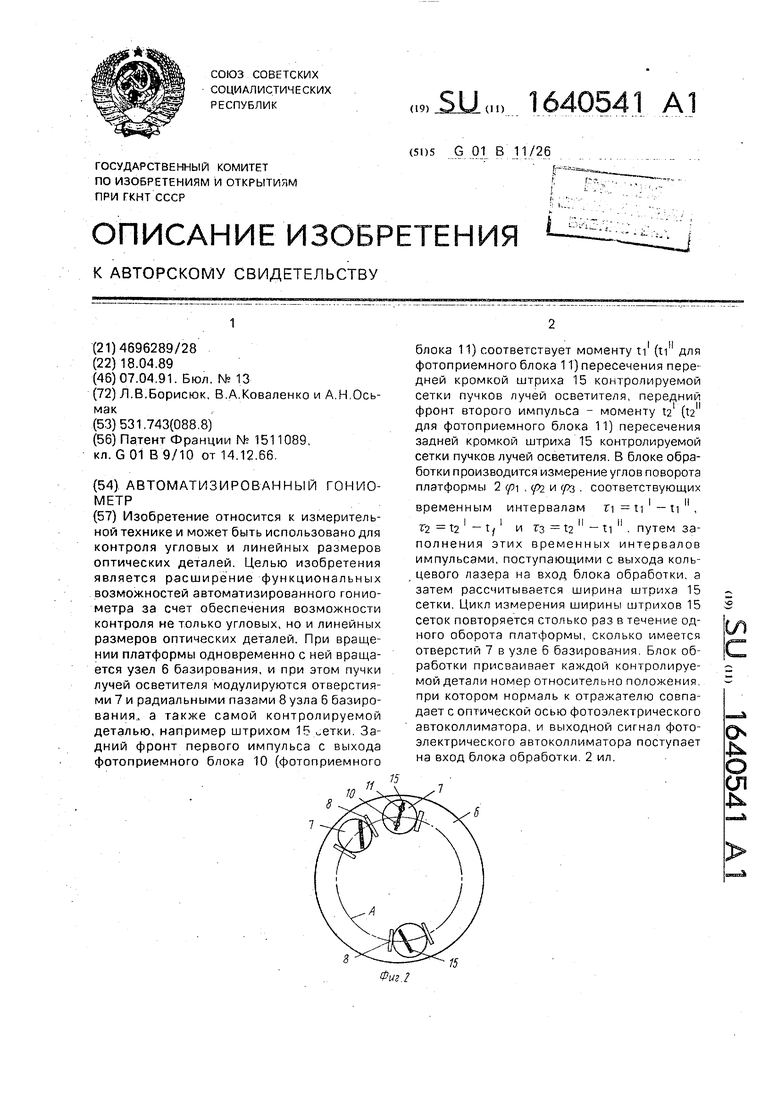
| Станки для доводки наружных поверхностей вращения | 1988 |
|
SU1511089A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
