Изобретение относится к устройствам автоматики и вычислительной техники и может быть использовано при проектировании приборов автоматики
и цифроаналоговых следящих систем, на вход которых поступает управляющий сигнал с выхода цифроаналоговрго преобразователя в виде ступенчатого,
изменяющегося по линейному закону напряжения при постоянной частоте смены информации, например в цифро- аналоговых следящих системах, замкну- тых по углу, управляющих постоянной скоростью вращения нагрузки.
Цель изобретения - повышение точности устройства.
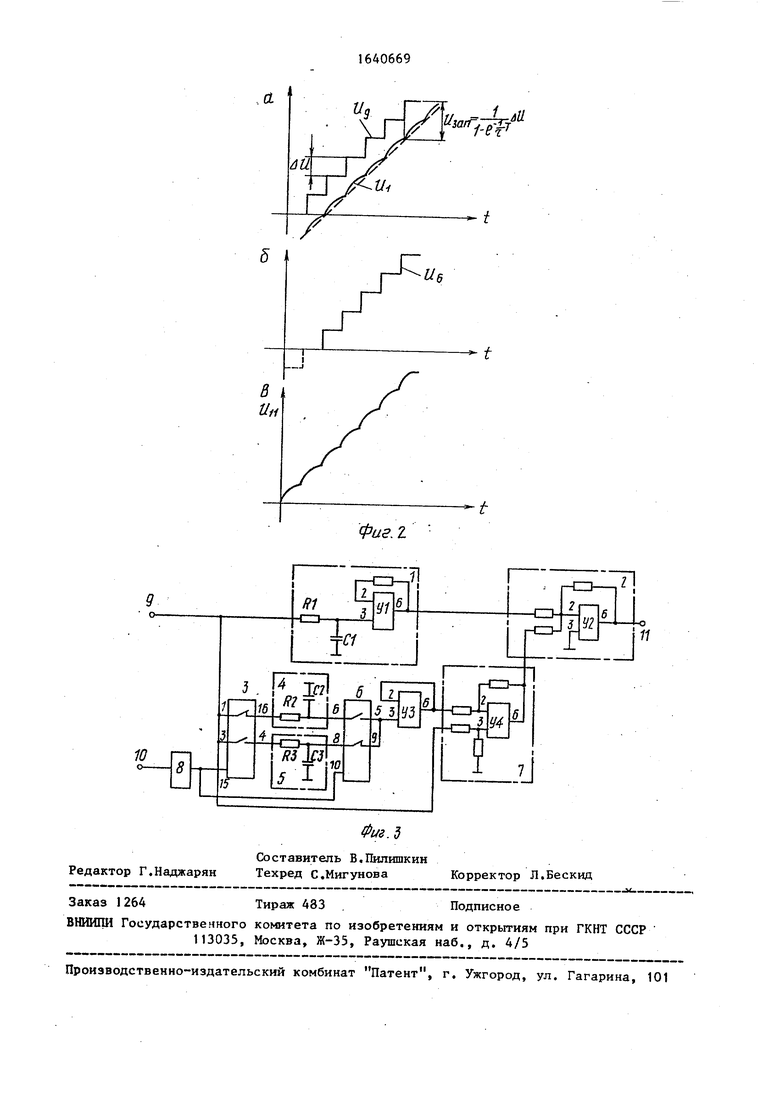
На фиг.1 представлена структурная схема предлагаемого корректирующего устройства; на фиг.2 - временные диаграммы, поясняющие работу устройства; на фиг. 3 - принципиальная электрическая схема устройства.
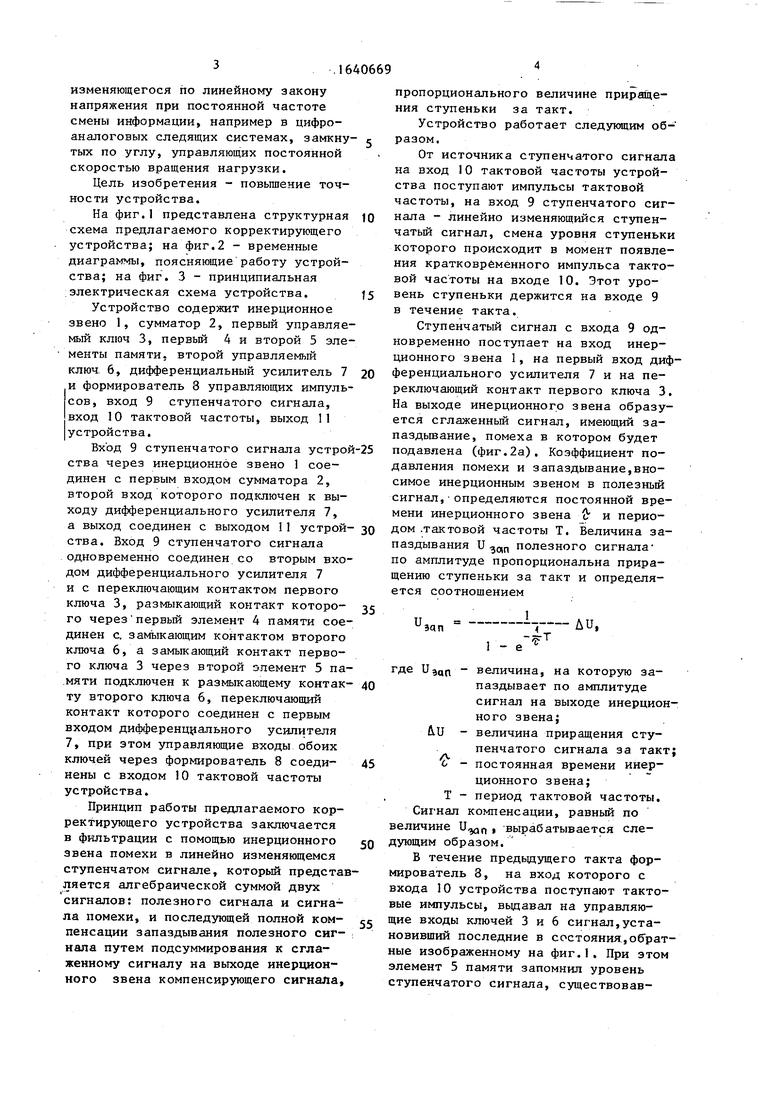
Устройство содержит инерционное звено 1, сумматор 2, первый управляемый ключ 3, первый 4 и второй 5 элементы памяти, второй управляемый ключ 6, дифференциальный усилитель 7 и формирователь 8 управляющих импульсов, вход 9 ступенчатого сигнала, вход 10 тактовой частоты, выход 11 устройства.
Вход 9 ступенчатого сигнала устрой ства через инерционное звено 1 соединен с первым входом сумматора 2, второй вход которого подключен к выходу дифференциального усилителя 7, а выход соединен с выходом 1 устрой- ства. Вход 9 ступенчатого сигнала одновременно соединен со вторым входом дифференциального усилителя 7 и с переключающим контактом первого ключа 3, размыкающий контакт которо- го через первый элемент 4 памяти соединен с. замыкающим контактом второго ключа 6, а замыкающий контакт первого ключа 3 через второй элемент 5 памяти подключен к размыкающему контак- ту второго ключа 6, переключающий контакт которого соединен с первым входом дифференциального усилителя 7, при этом управляющие входы обоих ключей через формирователь 8 соеди- йены с входом 10 тактовой частоты устройства.
Принцип работы предлагаемого корректирующего устройства заключается в фильтрации с помощью инерционного звена помехи в линейно изменяющемся ступенчатом сигнале, который представляется алгебраической суммой двух сигналов: полезного сигнала и сигнала помехи, и последующей полной ком- пенсации запаздывания полезного сигнала путем подсуммирования к сглаженному сигналу на выходе инерционного звена компенсирующего сигнала,
пропорционального величине приращения ступеньки за такт.
Устройство работает следующим образом.
От источника ступенчатого сигнала на вход 10 тактовой частоты устройства поступают импульсы тактовой частоты, на вход 9 ступенчатого сигнала - линейно изменяющийся ступенчатый сигнал, смена уровня ступеньки которого происходит в момент появления кратковременного импульса тактовой частоты на входе 10. Этот уровень ступеньки держится на входе 9 в течение такта.
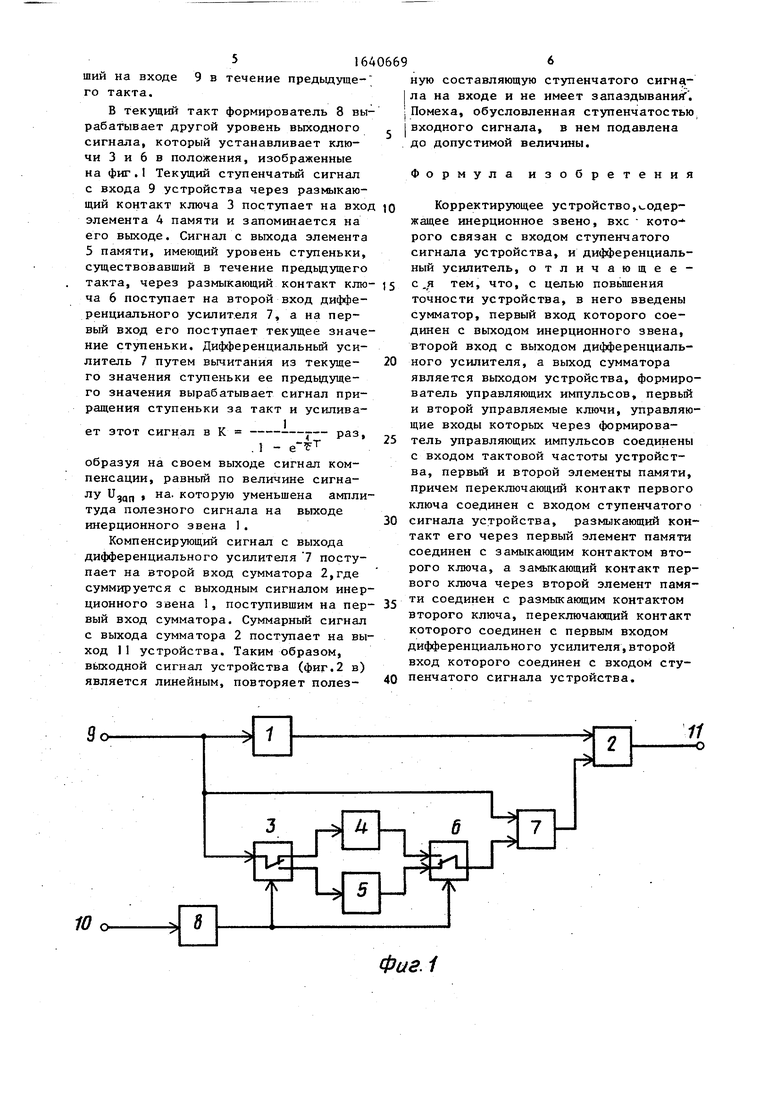
Ступенчатый сигнал с входа 9 одновременно поступает на вход инерционного звена 1, на первый вход дифференциального усилителя 7 и на переключающий контакт первого ключа 3. На выходе инерционного звена образуется сглаженный сигнал, имеющий запаздывание, помеха в котором будет подавлена (фиг.2а). Коэффициент подавления помехи и запаздывание,вносимое инерционным звеном в полезный сигнал, определяются постоянной времени инерционного звена р и периодом .тактовой частоты Т. Величина запаздывания U зап полезного сигнала по амплитуде пропорциональна приращению ступеньки за такт и определяется соотношением
1
1 - е
4т
Ли,
где иэап величина, на которую запаздывает по амплитуде сигнал на выходе инерционного звена;
&U - величина приращения ступенчатого сигнала за такт с - постоянная времени инерционного звена; Т - период тактовой частоты. Сигнал компенсации, равный по величине Uwf) , вырабатывается следующим образом.
В течение предыдущего такта формирователь 8, на вход которого с входа 10 устройства поступают тактовые импульсы, выдавал на управляющие входы ключей 3 и 6 сигнал,установивший последние в состояния,обратные изображенному на фиг.1. При этом элемент 5 памяти запомнил уровень ступенчатого сигнала, существовав5164
ший на входе 9 в течение предыдуще- го такта.
В текущий такт формирователь 8 вырабатывает другой уровень выходного сигнала, который устанавливает ключи 3 и 6 в положения, изображенные на фиг.I Текущий ступенчатый сигнал с входа 9 устройства через размыкающий контакт ключа 3 поступает на вход элемента 4 памяти и запоминается на его выходе. Сигнал с выхода элемента 5 памяти, имеющий уровень ступеньки, существовавший в течение предыдущего такта, через размыкающий контакт клю- ча 6 поступает на второй вход дифференциального усилителя 7, а на первый вход его поступает текущее значение ступеньки. Дифференциальный усилитель 7 путем вычитания из текуще- го значения ступеньки ее предыдущего значения вырабатывает сигнал приращения ступеньки за такт и усиливает этот сигнал в К раз,
1 -
образуя на своем выходе сигнал компенсации, равный по величине сигналу , на. которую уменьшена амплитуда полезного сигнала на выходе инерционного звена 1.
Компенсирующий сигнал с выхода дифференциального усилителя 7 поступает на второй вход сумматора 2,где суммируется с выходным сигналом инерционного звена 1, поступившим на пер- вый вход сумматора. Суммарный сигнал с выхода сумматора 2 поступает на выход 11 устройства. Таким образом, выходной сигнал устройства (фиг.2 в) является линейным, повторяет полез-
Q 5 0
5 0
5
0
ную составляющую ступенчатого сигна ла на входе и не имеет запаздывания. Помеха, обусловленная ступенчатостью j входного сигнала, в нем подавлена до допустимой величины.
Формула изобретения
Корректирующее устройство,одер жащее инерционное звено, вхс кото рого связан с входом ступенчатого сигнала устройства, и дифференциальный усилитель, отличающее- тем, что, с целью повышения точности устройства, в него введены сумматор, первый вход которого соединен с выходом инерционного звена, второй вход с выходом дифференциального усилителя, а выход сумматора является выходом устройства, формирователь управляющих импульсов, первый и второй управляемые ключи, управляющие входы которых через формирователь управляющих импульсов соединены с входом тактовой частоты устройства, первый и второй элементы памяти, причем переключающий контакт первого ключа соединен с входом ступенчатого сигнала устройства, размыкающий контакт его через первый элемент памяти соединен с замыкающим контактом второго ключа, а замыкающий контакт первого ключа через второй элемент памяти соединен с размыкающим контактом второго ключа, переключающий контакт которого соединен с первым входом дифференциального усилителя,второй вход которого соединен с входом ступенчатого сигнала устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| Формирователь ступенчатого напряжения | 1987 |
|
SU1524165A1 |
| Устройство для централизованного контроля | 1974 |
|
SU652570A2 |
| Формирователь ступенчатого напряжения | 1986 |
|
SU1370738A2 |
| Устройство для решения дифференциальных уравнений | 1986 |
|
SU1403079A1 |
| Аналоговое запоминающее устройство | 1979 |
|
SU930387A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Устройство для определения постоянных времени нестационарных инерционных звеньев | 1974 |
|
SU551613A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ИМПУЛЬСНОГО РАДИОДАЛЬНОМЕРА С АВТОМАТИЧЕСКИМ СОПРОВОЖДЕНИЕМ РАССТОЯНИЯ ДО ДИЭЛЕКТРИЧЕСКОГО СЛОЯ | 1992 |
|
RU2069892C1 |
| Устройство для автоматизированного контроля параметров реле | 1985 |
|
SU1265704A1 |
Изобретение относится к устройствам автоматики и вычислительной техники и может быть использовано при проектировании приборов автоматики и цифроаналоговых следящих систем, на вход которых поступает управляющий сигнал с выхода цифроаналого- вого преобразователя в виде ступенчатого напряжения при постоянной частоте смены цифровой информации, например в цифроаналоговых следящих системах, замкнутых по углу, управляющих постоянной скоростью вращения нагрузки. Цель изобретения - повышение точности устройства. Для достижения указанной цепи в корректирующее устройство, содержащее инерционное звено, вход которого связан с входом ступенчатого сигнала устройства, вход тактовой частоты и диффе- - ренциальный усилитель, введены дополнительно сумматор, первый вход которого соединен с выходом инерционного звена, второй вход - с выходом дифференциального усилителя, а выход сумматора - с выходом устройства; первьй и второй управляемые ключи, управляющие входы которых через управляющее устройство соединены с выходом тактовой частоты; первый и второй элементы памяти. Причем переключающий контакт первого ключа соединен с входом ступенчатого сигнала, нормально-замкнутый контакт его через первый элемент памяти соединен с нормально-разомкнутым контактом второго ключа, а нормально-разомкнутый контакт первого ключа через второй элемент памяти соединен с нормально- замкнутым контактом второго ключа, переключающий контакт которого соединен с первым входом дифференциального усилителя, второй вход которого соединен с входом ступенчатого сигнала устройства. При этом коэффициент усиления дифференциального усилителя равен К 1 - Г гЯе 1 - Ј - постоянная времени инерционного звена; Т - период тактовой частоты смены информации. 3 ил. с S (Л 05 4 О о О5 х
Фиг. 1
| Топчеев Ю.И | |||
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| М,: Машиностроение, 1971, с | |||
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |
| Корректирующее устройство | 1975 |
|
SU533907A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
