1
Изобретение относится к автоматическому регулированию и может быть использовано при создании измерительной аппара.туры.
Известно устройство для измерения постоянных времени инерционных звеньев систем автоматического регулирования, в ко тором интегрируется разность напряжений на входе и выходе исследуемого звена.
-Однако с помощью этого устройства,
во первых, невозможно определить постоянную времени нестационарных инерционных звеньев (можно определить лишь среднюю постоянную времени, которая может значительно отличаться от постоянной времени. на рабочем участке); во-вторых, невозможно определить постоянную времени инерционных звеньев с запаздыванием. При наличии в звене запаздывания при интегрировании разности входного и выходного сигналов .велйчинь плошади, численно равной постоянной времени, будет увеличена :; на плЬщада, равную произведению времени запаздьшания на установившееся значение ординаты выходного сигнала, что вызовет
существенные искажения в определении постоянной времени, и, в-третьих, устройству свойственна низкая точность в определении электромагнитной постоянной времени. При некоторой ошибке в установке коэффициентов передачи по каждому входу, а также в установке коэффициентов передачи по каждому входу, а также при незначительном изменении динамической характеристики исследуемого звена в установившемся режиме появится ошибка, которую интегри рует интегратор, что может привести к ошибкам в определении постоянной времени исследуемого звена. Кроме того, канал по току имеет значительный коэффициент усиления. Дрейф усилителя канала по току передается на интегратор, что затрудняет измерения малых постоянных времени.
Наиболее близким к изобретению техническим решением является устройство для определения постоянных времени. Оно содержит интегратор, выход которого подключен к входу измерительного блока и два масштабных блока, вход первого из которых связан с вьхходом инерционного зве-,
на, а его вход соединен с одннм из входов ключа. Другой вход ключа подключен к источнику эталонного напряжения, а выход ключа соединен с входом второго масштабного блока. Однако и это устройство нм-ет ряд недостатков, которые сужают область его применения. К ним относятся5 Невозможность определения посто йшыл времени нестационарных инерционных звеньзр. Если постоянная времени звена меняется во время процесса, то интегрируя разность эталлонного сигнала и сигнала пропорционального кривой переходного процессе, определяют среднюю псхлоянную времени, которая может агшчительно отличаться т постоянной времени на рабочем участке;
невозможность определить постоянные времени икерционных звеньев с запаздыванием, так как при наличии в инерционком звене запаздьшааия интеграл разности будет увеличеи на величину площади ему пропорциональную, что приведет к существенным ошибкам в определении постоянной времени;
низкая точность в определении электромагнитной постоянной времени. Этосвязано с тем, что в установившемся режиме на вход интегратора подаются шумы и ошибки масштабирования, которые, интегрируясь приводят к большим ошибкам в определении постоянных времени.
Цель изобретения - расширение обгластг применения и повышения точности устройства..Это достигается тем, что устройство i содержит формирователь управляюшего сигь нала и четыре дополнительных ключа, управляюшие входь которых подключены к
.соответствующим выходам формирователя управляюшего сигнала, вход которого соединен с выходом первого масштабного 6ntv
: ка, который через последюатвльно соединенные первый и второй дополнительные ключи подключён к одному входу интегратора, к другому входу которого через пос.ледовательно соединенные третий и четвертый дополнительные ключи подключен выход второго масштабного блока. ,
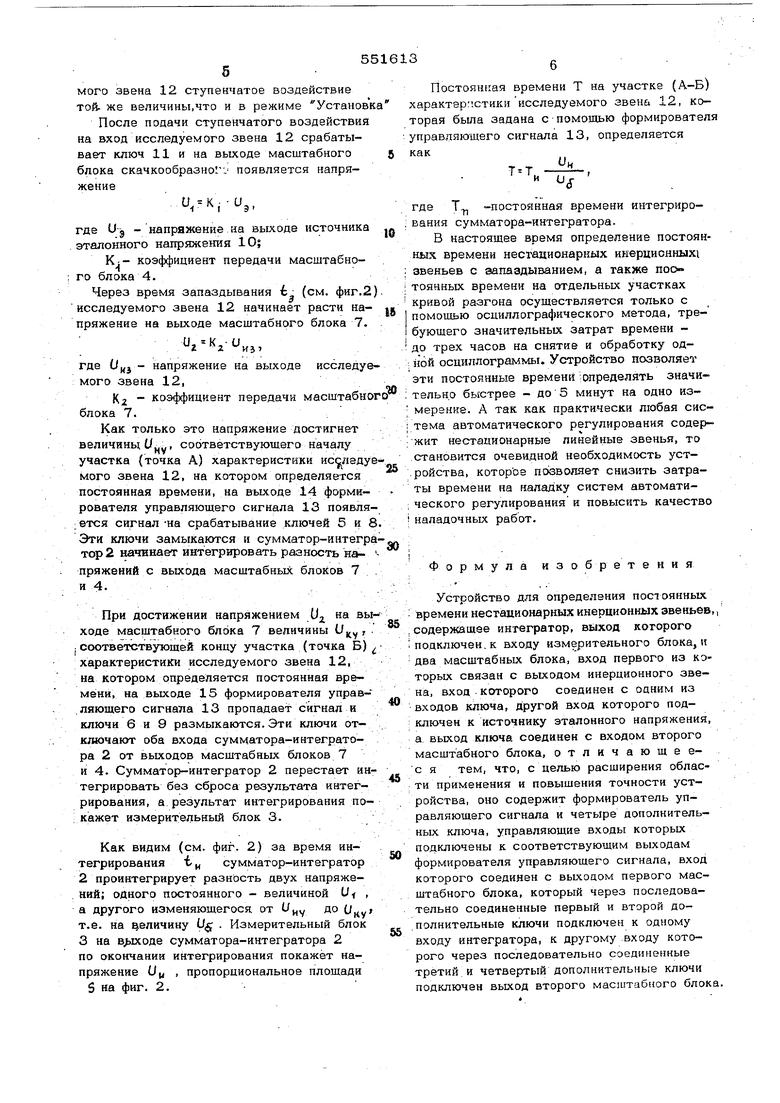
На фиг. 1 изображена функциональная схема устройства; на фиг.. 2 - диаграмма . поясняюшая работу функциональной схемы.
Функциональная схема устройства 1 содержит интегратор 2- на два входа, подключенный к его выходу измерительный бло 3 и масштабный блок 4, ключи 5 и 6, масштабный блок 7, ключи 8 и 9, источник эталонного напряжения 10, ключ 11, инерционное звено 12 и формирователь управляюшего сигнала 13 с выходами 14 и 15. Вход 16 формирователя управляюшего сиг-, нала 13 служит для настройки последнего.
Работа устройства подразделяется на два режима.
Первый режимУстановк а . Интегратор 2 работает как сумматор. Коэффициенты передачи масштабных блоков 7 и 4 равны нулю. По входу 16 формирователь управляюшаго сигнала 13 настраиваеп ся так, чтобы на его выходах 14 и 15 бьши сигналы, по которым ключи 5, 8, 6, 9 были замкнуты.
В этом режиме осуществляется установка необходимых коэффициентов передачи масштабных блоков 7 и 4. Для этого нуж-, но подать .ступенчатое воздействие на вход Енерцйонного (исследуемого) звена 12. Ключ 11 замыкается одновременно с подачей сигнала на вход исследуемого звена 12. Полярность напряжения источнику :Э1алошюго напряжения 10 может быть
любой,, важно только, чтобы она была . 1 всегда противоположна пол$фноотй neaipst
жения на выходе исследуемого звена 12..
. По окончании переходного процесса в исследуемом звене 12 устанавливаем по измерительному блоку 3 максимальное значение напряжения на выходе интегратора 2 увеличением коэффициента передачи масштабного блока 7. Затем, увеличивая коэффициент передачи масштабного блока 4, добиваемся нулевых показаний измерительного блока 3..
После этого по входу 16-перестраиваем формирователь управляюшего сигнала 13 так, чтобы на его выходе 14 появился сигнал на замыкание ключей 5, 8 В момент, соответствуюший началу (точка А на фиг. 2 участка А-Б характеристики исследуемого звена 12, на котором определяется постоянная времени. На выходе 15 формирователя управляющего сигнала 13 сигнал, по кото рому ключи 6, 9 замкнуты, сушествует все время и пропадает в момент, соответствуюший концу участка А-Б характеристики (точка Б). Убрав воздействие с входа исследуемого звена 12 и по окончанивГ . переходного процесса в нем,переводим сумматор-интегратор 2 в режим интегрирования.
Второй режимРабота. Б этом режиме осуществляется определе: ние постоянной времени на том участке характеристики исследу;емого звена 12, который задан настройкой формирователя управляю- шего сигнала 13 в режиме Установка.
Для определения постоянной времени необходимо вновь подать на вход исследуемого звена 12 ступенчатое воздействие той- же величины,что и в режиме Установ После подачи ступенчатого воздействия на вход исследуемого звена 12 срабатывает ключ 11 и на выходе масштабного блока скачкообразного появляется напряжениегде Ug - напряжение на выходе источника эталонного напрях1ения 10; Ki- коэффициент передачи масштабного блока 4. Через время запаздывания t/ (см. фиг.2 исследуемого звена 12 начинает расти на пряжение на выходе масштабного блока 7. 0 - напряжение на выходе исследу мого звена 12, Кг - коэффициент передачи масштабн блока 7. Как только это напряжение достигнет величины С/..„, соответствующего началу ПТ. участка (точка А) характеристики мого звена 12, на котором определяется постоянная времени, на выходе 14 формирователя управляющего сигнала 13 появля ; ется сигнал -на срабатывание ключей 5 и Эти ключи замыкаются и сумматор-интегр тор 2 начинает интегрировать рааность нэпряжений с выхода масштабных блоков 7 и 4. При достижении напряжением U на вы ходе масштабного блока 7 величины , , соответствующей концу участка (точка Б) характеристики исследуемого звена 12, на котором определяется постоянная времени, на выходе 15 формирователя управ.ляющего сигнала 13 пропадает сигнал и ключи 6 и 9 размыкаются. Эти ключи отключают оба входа сумматора-интегратора 2 от выходов масштабных блоков 7 и 4. Сумматор-интегратор 2 перестает ин тегрировать без сброса результата интегрирования, а результат интегрирования по- ; кажет измерительный блок 3. Как видим (см. фиг. 2) за время интегрирования Ь и сумматор-интегратор 2проинтегрирует разность двух напряжений; одного постоянного - величиной Uf , а другого изменяющегося от U до U,y) т.е. на величину U . Измерительный блок 3на в Ixoдe сумматора-интегратора 2 по окончании интегрирования покажет напряжение U( , пропорциональное S на фиг. 2. Постояимая времени Т на участке (А-Б) характерг.стикиисследуемого звень 12, которая была задана с помощью формирователя управляющего сигнала 13, определяется как Т-Т Uj где Т -постоянная времени интегрирования сумматора-интегратора. В настоящее время определение постоянных времени нестационарных инерционных1 звеньев с запаздыванием, а также пос тоянных времени на отдельных участках кривой разгона осуществляется только с помощью осциллографического метода, требующего значительных затрат времени до трех часов на снятие и обработку од1юй осциллограммы. Устройство позволяет эти постоянные времени :определять значительнр быстрее - до 5 минут на одно измерзкие. А так как практически любая система автоматического регулирования содержит нестационарные линейные звенья, то становится очевидной необходимость уст. ройства, которое посволяет снизить затраты времени на наладку систем автоматического регулирования и повысить качество наладочных работ. Формула изобретения Устройство для определения nociоянных времени несгационарных инерционных звеньев,, содержащее интегратор, выход которого подключен,к входу измерительного блока, и два масштабных блока, вход первого из которьис связан с выходом инерционного звена, вход которого соединен с одним из входов ключа, другой вход которого подключен к источнику эталонного напряжения, а выход ключа соединен с входом второго масштабного блока, отличающеес я тем, что, с целью расширения области применения и повышения точности устройства, оно содержит формирователь управляющего сигнала и четыре дополнительных ключа, управляющие входы которых подключены к соответствующим выходам формирователя управляющего сигнала, вход которого соединен с выходом первого масштабного блока, который через последовательно соединенные первый и второй дополнительные ключи подключен к одному входу интегратора, к другому входу которого через последовательно соединенные третий и четвертый дополнительные ключи подключен выход второго масштабкого блока.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения постоянных времени нестационарных инерционных звеньев | 1976 |
|
SU645128A1 |
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| СИСТЕМА "ТОНКОГО" РЕГУЛИРОВАНИЯ ТОЛЩИНЫ ПОЛОСЫ НА НЕПРЕРЫВНОМ СТАНЕ ХОЛОДНОЙ ПРОКАТКИ | 1993 |
|
RU2065790C1 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| Устройство для определения параметров динамического звена | 1987 |
|
SU1478194A1 |

Фиг2
