Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам контроля натяжения гибкого тягового органа подъемника, и является усовершенствованием устройства по авт.св. № 1281492.
Цель изобретения - повышение надежности в работе.
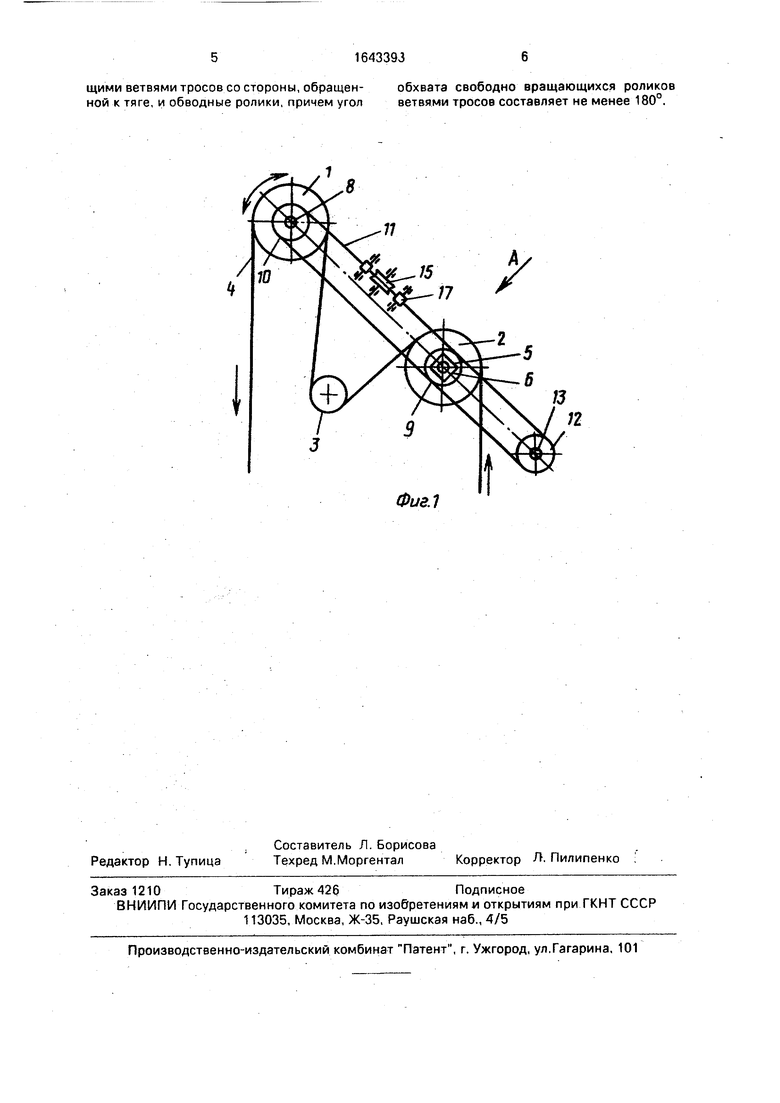
На фиг.1 изображено устройство, общий вид; на фиг.2 - вид А на фиг, 1.
Устройство содержит кан это веду щи и 1, промежуточный 2 шкивы и обводной ролик 3, контактирующие с тяговым органом 4. Шкив 2 снабжен направляющими 5, в которых подвижно установлены опоры 6 вала 7 шкива 2.
Шкивы 1 и 2 неподвижно установлены соответственно на валах 8 и 7, на концах которых жестко закреплены соответственно барабаны 9 и 10, соединенные между собой посредством двух тросов 11, охватывающих эти барабаны несколькими витками,
Диаметры шкивов 1 и 2, а также барабанов 10 и 9удовлетворяют равенству: D1:D2 D10:D9, где D1, D2, D9, D10 - диаметры соответственно шкивов 1 и 2 и барабанов 9 и 10. При соблюдении этого условия скорости перемотки всех точек троса 11 равны между собой (при нормальной, т.е. без проскальзывания, работе подъемника).
Устройство снабжено блоками 12, установленными с возможностью вращения на неподвижной оси 13. Тросы t1 охватывают также и блоки 12.
Кроме того, в устройстве имеется механизм для выравнивания усилий в ведущих ветвях тросов 11. Он выполнен в виде тяги 14, по концам которой установлены свободно вращающиеся ролики 15 и 16. Направляющие оболочки 17 закреплены так, что расстояние между ними в свету равно диаметру роликов 15 (или 16). Это обеспечивает обхват роликов 15 и 16 тросами 11с углом, равным 180°, т.е. параллельность ветвей троса между блочками 17 и роликами 15 (16) в любом положении тяги 14. Таким образом, бесконечно замкнутый трос 11 охватывает последовательно барабан 10, блочок 17, ролик 15(16), вновь блочок 17, затем бйрабан 9, блок 12 и возвращается на барабан 10.
Устройство работает следующим образом.
Вращение от канатоведущего шкива 1 и вала 8 передается барабаном 10, которые наматывают на себя тросы 11. Тяговый орган 4, перемещаемый шкивом 1, вращает промежуточный шкив 2, а следовательно, и вал 7 с барабанами 9. Вследствие равенства окружных скоростей барабанов 10 и 9 все
точки тросов 11 имеют одинаковые скорости и последние непрерывные перематываются барабанами 9 и 10 и блоками 12, не вызывая смещения промежуточного шкива 2.
При ослаблении натяжения тягового органа 4 (вследствие его вытяжки) он начинает проскальзывать по шкиву 1, его средняя скорость уменьшается, поэтому уменьшается и угловая скорость шкива 2 и барабанов
9. Окружная скорость последних становится меньше окружной скорости барабанов 10, следовательно, тросы 11 наматываются на барабаны 10 быстрее, чем сматываются с барабанов 9. Это приводит к тому, что шкив
2 начинает смещаться в направляющих 5 по направлению к шкиву 1 вследствие укорачивания верхней ветви троса, расположенной между барабанами 10 и 9, что вызывает натяжение тягового органа 4. Процесс продолжается до исчезновения проскальзывания тягового органа 4 по шкиву 1. При этом трос 11 не провисает, так как расстояние между валом 8 шкива .1 и осью 13 блоков 12 не изменяется.
Введенный в устройство механизм (тяга
14 с роликами 15 и 16) обеспечивает строгое равенство усилий натяжения в обоих тросах 11 (в их ведущих ветвях). Если, например, по каким-либо причинам один из тросов 11,
например левый (фиг.2), будет натянут больше, чем правый, то на ролик 15 будет действовать большее усилие, чем ролик 16. В результате тяга 14 под действием разности этих усилий сместится в сторону большего
из них, т.е. в сторону левого троса 11. Это вызовет ослабление натяжения левого (фиг.2) троса 11 и усиление натяжения правого троса 11: Процесс происходит до выравнивания усилий в обоих тросах 11,после
чего тяга 14 вновь станет неподвижной.
Обеспечение постоянного равенства усилий в тросах 11 позволяет создать симметричную нагрузку, действующую на промежуточный шкив 2, что заведомо
исключает его возможный перекос при движении в направляющих 5 (когда ослабнет натяжение тягового органа 4).
50
Формула изобретения
Устройство для контроля натяжения гибкого тягового органа подъемника по авт.св. № 1281492, отличающееся тем, что, с целью повышения надежности в рабо- 5 те, оно снабжено установленным между барабанами механизмом выравнивания усилий в ведущих ветвях обоих тросов, включающим в себя жесткую тягу с двумя установленными на ее концах свободно вращающимися роликами, огибаемыми ведущими ветвями тросов со стороны, обращенной к тяге, и обводные ролики, причем угол
обхвата свободно вращающихся роликов ветвями тросов составляет не менее 180°.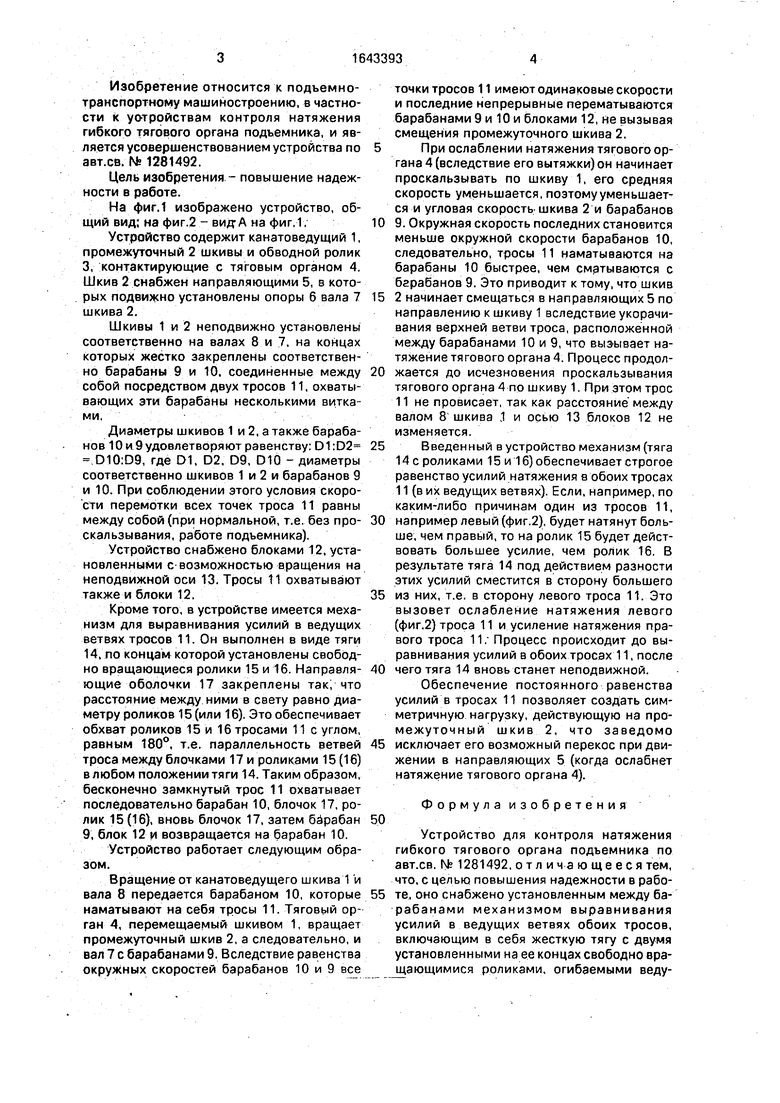
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения ленты конвейера | 1989 |
|
SU1648857A2 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1984 |
|
SU1217766A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1981 |
|
SU962171A1 |
| Устройство для натяжения ленты конвейера | 1984 |
|
SU1234306A1 |
| Устройство для контроля натяжения гибкого тягового органа | 1986 |
|
SU1323508A1 |
| Ременная передача | 1989 |
|
SU1721338A1 |
| Ленточный конвейер | 1984 |
|
SU1234307A1 |
| ЛЕБЁДКА | 2018 |
|
RU2668880C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ И ФИКСАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2209745C2 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1977 |
|
SU639792A1 |
Изобретение относится к подъемно- транспортному машиностроению, в частности к устройством контроля натяжения гибкого тягового органа подъемника. Цель изобретения - повышение надежности работы. Устройство содержит канатоведущий (КШ) 1 и промежуточный (ПШ) 2 шкивы, контактирующие с гибким тяговым органом. Шкивы 1 и 2 кинематически связаны между собой тросами (Т) 11, намотанными на барабаны (Б) 9 и 10, причем соблюдается равенство соотношений диаметров шкивов и барабанов D1:D2 D10:D9. Имеются также тяга 14 со свободно вращающимися роликами (Р) 15 и 16, охватываемыми ведущими ветвями Т 11. Вращение от КШ 1 передается через гибкий тяговый орган ПШ 2. При этом Т 11 перематываются на Б 9 и 10. При появлении проскальзывания тягового органа 4 по КШ 1 скорость ПШ 2 уменьшается, в результате Т 11 подтягивают ПШ 2 к КШ 1, -натягивая гибкий тяговый орган. Тяга 4 с Р 15 и 16 обеспечивает равенство усилий натяжения в Т 11, что предотвращает возможный перекос ПШ 2 при его смещении в направлении к КШ 1 2 ил. Вид А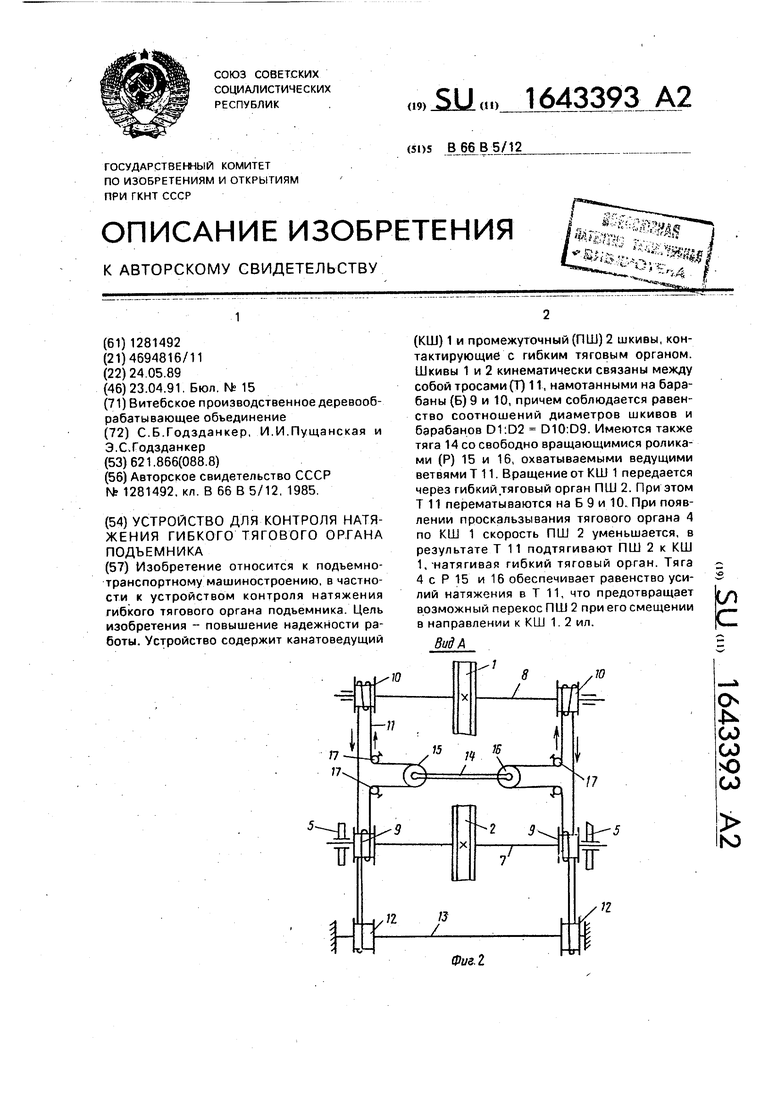
,8
У
17Г
Фиг.1
| Авторское свидетельство СССР N 1281492.кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
