Изобретение относится к устройствам контроля работы подъемных установок со шкивами трения.
Цель изобретения - снижение габаритов устройства.
На фиг. 1 изображено устройство, вид сбоку; на фиг. 2 - вид А на фиг. 1.
Устройство содержит канатоведущий шкив I, промежуточный шкив 2 и обводной ролик 3, контактирующие с тяговым
В случае ослабления натяжения тягового органа 4 он начинает проскальзывать относительно шкива 1. При этом угловая скорость шкива 2, ведомого тяговым органом 4, а также шестерни-сателлита 10 уменьшается. Это приводит к тому, что корпус- водило 11 начинает поворачиваться (по часовой стрелке, фиг. 1) вокруг вала 5. При этом шестерня 8 обкатывается по шестерне 7, а шкив 2 (с валом 6) повораорганом 4. Шкивы 1 и 2 закреплены на Ючивается вместе с корпусами 11 вокруг ва- валах 5 и 6, кинематически связанных между собой цилиндрическими шестерня 7-10, размешенными в корпусе 11, который установлен на валу 5 свободно, с возможностью поворота относительно вала 5. Диаметры
JlVJUWL/ jlItJV l.ll - I l,l)J.LJlJ.V LJLAtflt Vy./, ltJI4.4--l Lf UlAC,,
ШКИВОВ 1 и 2, a также числа зубьев шесте-ната) по шкиву 1.
рен 7 и 10 (закрепленных на валах 5 и 6 этих шкивов) связаны соотношением
ла 5 (т. е. вокруг канатоведущего шкива 1), в результате чего угол охвата тяговым органом 4 шкива 1 увеличивается, что приводит к уменьшению и полному исчезновению проскальзывания тягового органа (каКроме того, при этом выбирается и слабина, появившаяся при вытяжке тягового органа 4. Таким образом, требуемое Р« (минимально необходимое) натяжение тягового органа 4 автоматически восстанавливается с использованием привода самого устройства.
сС. 0
Кроме того, при этом выбирается и слабина, появившаяся при вытяжке тягового органа 4. Таким образом, требуемое Р« (минимально необходимое) натяжение тягового органа 4 автоматически восстанавливается с использованием привода самого устройства.
В этом случае при отсутствии проскальзывания тягового органа 4 по шкиву 1 корпусы 11 не меняют своего углового положения (неподвижны).
Устройство работает следуюшим образом.
Вращение от канатоведущего шкива 1 че- 25 рез тяговый орган (канат, трос) 4 передается промежуточному шкиву 2. Одновременно от вала 5 шкива 1 и от вала 6 шкива 2 вращаются соответственно шестерни 7 и К), т. е. получается дифференциальный механизм
с двумя входами (на солнечное колесо 7 30 снижения габаритов устройства, кинемати- и сателлит 10) и одним выходом (на кор-ческая связь валов шкивов представляет сопус-водило 11). При отсутствии проскальзы-бой дифференциальный механизм, водило кования (при нормальной работе устройства)торого установлено на валу канатоведукорпус-водило 11 неподвижен, и угол охва-шего шкива с возможностью поворота отта шкива 1 тяговым органом 4 не меняется.носительно него.
Формула изобретения
Устройство для контроля натяжения гибкого тягового органа, содержашее канатоведущий и промежуточный шкивы, закрепленные на валах, кинематически связанных .между собой, отличающееся тем, что, с целью
В случае ослабления натяжения тягового органа 4 он начинает проскальзывать относительно шкива 1. При этом угловая скорость шкива 2, ведомого тяговым органом 4, а также шестерни-сателлита 10 уменьшается. Это приводит к тому, что корпус- водило 11 начинает поворачиваться (по часовой стрелке, фиг. 1) вокруг вала 5. При этом шестерня 8 обкатывается по шестерне 7, а шкив 2 (с валом 6) поворачивается вместе с корпусами 11 вокруг ва-
чивается вместе с корпусами 11 вокруг ва-
,,
ната) по шкиву 1.
ла 5 (т. е. вокруг канатоведущего шкива 1), в результате чего угол охвата тяговым органом 4 шкива 1 увеличивается, что приводит к уменьшению и полному исчезновению проскальзывания тягового органа (каКроме того, при этом выбирается и слабина, появившаяся при вытяжке тягового органа 4. Таким образом, требуемое (минимально необходимое) натяжение тягового органа 4 автоматически восстанавливается с использованием привода самого устройства.
снижения габаритов устройства, кинемати- ческая связь валов шкивов представляет соФормула изобретения
Устройство для контроля натяжения гибкого тягового органа, содержашее канатоведущий и промежуточный шкивы, закрепленные на валах, кинематически связанных .между собой, отличающееся тем, что, с целью
вид А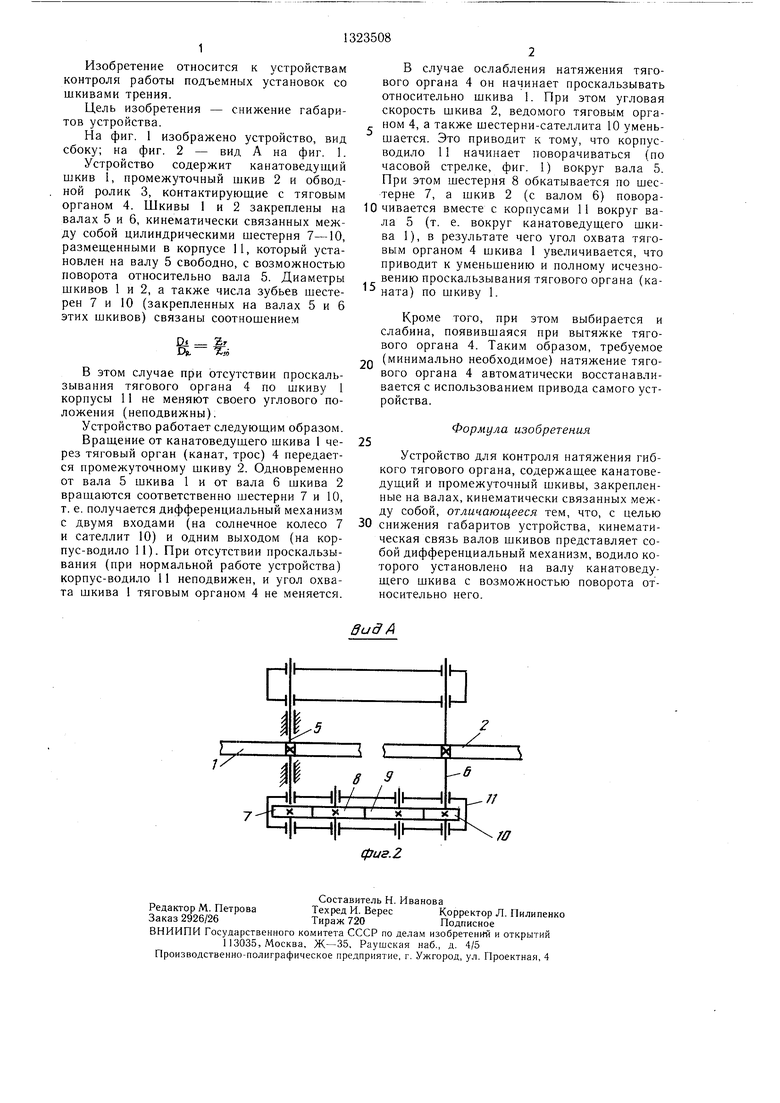
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1981 |
|
SU962171A1 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1989 |
|
SU1643393A2 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1984 |
|
SU1217766A1 |
| Устройство для натяжения ленты конвейера | 1986 |
|
SU1326510A1 |
| Устройство для натяжения ленты конвейера | 1984 |
|
SU1234306A1 |
| Устройство для натяжения ленты конвейера | 1989 |
|
SU1648857A2 |
| Устройство для контроля натяжения гибкого тягового органа подъемника | 1985 |
|
SU1286492A1 |
| Устройство для натяжения ленты конвейера | 1981 |
|
SU1027109A1 |
| Ленточный конвейер | 1984 |
|
SU1234307A1 |
| Концевая секция ленточного конвейера | 1984 |
|
SU1229140A1 |
Изобретение относится к устройствам контроля работы подъемных установок. Целью изобретения является снижение габаритов устройства. Устройство содержит кана- товедущий шкив 1, промежуточный шкив 2, которые закреплены на валах, кинематически связанных между собой, и обводной ролик 3. Шкивы 1, 2 и ролик 3 контактируют с тяговым органом 4. Кинематическая связь валов шкивов 1, 2 выполнена в виде дифференциального механизма, водило которого установлено на валу канато- ведуш,его шкива 1 с возможностью поворота относительно него. При проскальзывании тягового органа 4 относительно шкива 1, про- исходяшем в случае ослабления натяжения, водило начнет поворачиваться вокруг вала шкива 1. При этом шкив 2 со своим валом будет поворачиваться вместе с водилом вокруг вала шкива 1. В результате угол охвата тяговым органом 4 шкива 1 увеличится, что приведет к исчезновению проскальзывания тягового органа 4 по шкиву 1. 2 ил. СО 00 ьо со СП о 00 сригЛ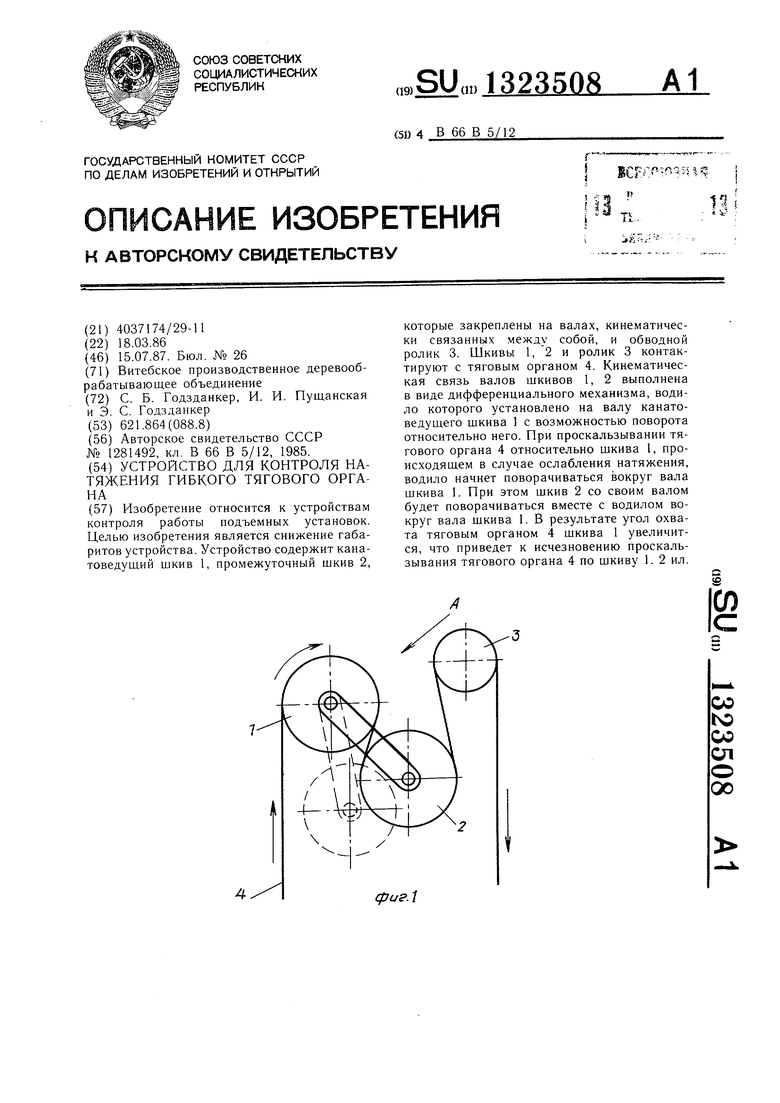
| Авторское свидетельство СССР № 1281492, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
