(21)4697294/03
(22)06.04.89
(46) 23.04.91. Бюл. 15
(71)Опытное кокструкторско-тех- нологическое бюро специального технологического оборудования Производственного объединения Крастяжмаш
(72)И.К.Ковнеров
(53)621.879(088,8)
(56)Виноградов В.С, Оборудование для механизации производственных процессов на карьерах,, - Недра, 1974, с„ 160, рис„ Г-37,
Авторское свидетельство СССР V 1033646, кл. Е 02 Ґ 3/38, 1981,
(54)РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА
(57)Изобретение относится к землеройной технике, а именно к одноковшовым экскаваторамо Цель изобретения - расширение технологических возможностей и повышение надежности путем создания различных жестких схем копания Оборудование включает
подъемную тягу i , надстройку 2 с главным валом 3, рукоять 4 из плоских телескопических ферм 5-7 s соединенных шарнирно в треугольную опору, и ковш 18, Надстройка 2 выполнена из плоских телескопических ферм 14, 15 и плат- N Формы 13, соединенных шарнирно в треугольную опору Подъемная тяга 1 выполнена из плоской телескопической фермы 17, соединенной осью 18 в треугольную опору совместно с фермой 7. валом 3 и фермой 15„ Каждая ферма 5, 6, 7, 14, 15, 17 кинематически связана соответственно с приводами 19, 20, 215 23, 24, Ферма 7 может быть выполнена нетелескопической без привода 21. В процессе работы.при различных комбинациях движений ферм посредством соответствующих приводов можно получать различные траектории движения ковша в зависимости от крепости разрабатываемой породы с максимальной производительностьюс 3 з„п, ф-лы, 1 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование экскаватора | 1981 |
|
SU1033646A1 |
| Экскаватор-лопата | 1979 |
|
SU848535A1 |
| Экскаватор-лопата | 1976 |
|
SU663785A1 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| Экскаватор | 1978 |
|
SU842144A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| ЭКСКАВАТОР для РАЗРАБОТКИ СКАЛЬНЫХ ПОРОД | 1972 |
|
SU324346A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
Изобретение относится к землеройной технике, а более конкретно к одноковшовым экскаваторам,,
Цель изобретения - расширение технологических возможностей и повышение надежности путем создания различных жестких схем копания
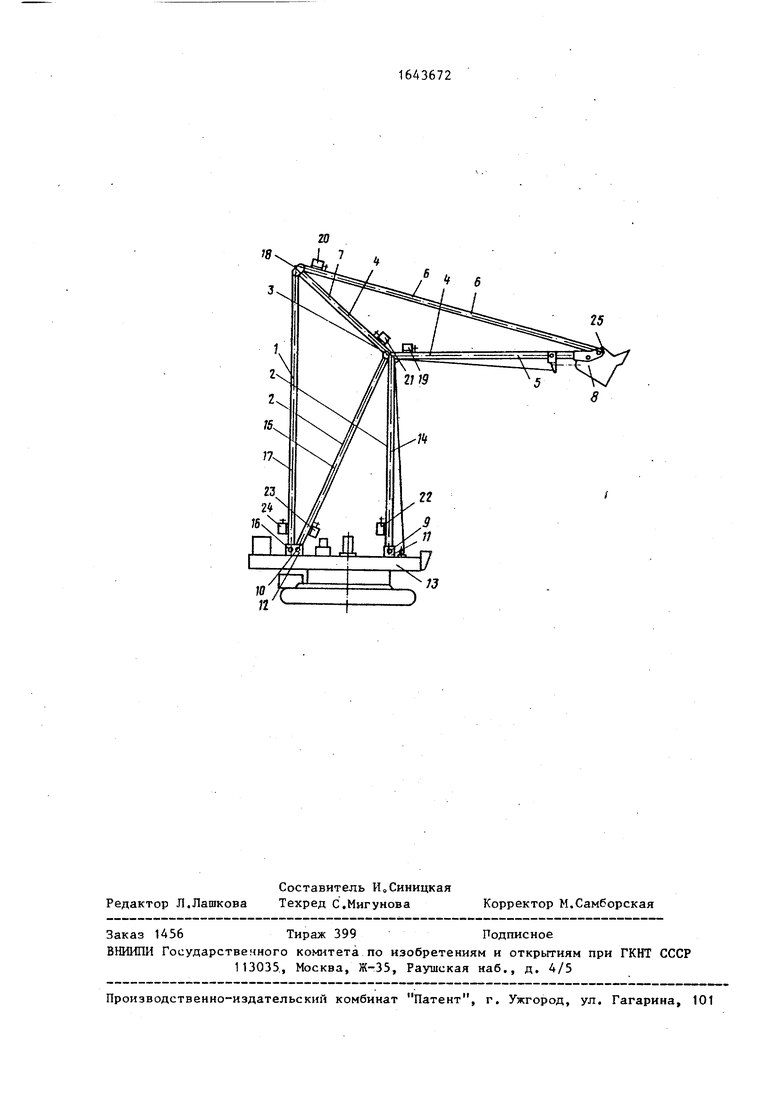
На чертеже схематически изображено рабочее оборудование
Рабочее оборудование включает подъемную тягу 1, надстройку 2 с главным валом 3, рукоять из плоских
телескопических ферм 5, 6Р 7, соединенных шарнирно в треугольную опору, основание 5 которой связано с главным валом 3, а вершина - с ковшом 8 (первый шарнирный треугольник).
Надстройка 2 установлена на осях 9, 10 в кронштейнах 11 и 12 поворотной платформы 138 выполнена из плоских телескопических ферм 14, 15 и . платформы 13, соединенных шарнирно в треугольную опору (второй шарнирный треугольник)с
Подъемная тяга 1 установлена на оси 16 в кронштейне 12 поворотной платформы 13, выполнена из плоской телескопической фермы 17, соединенной осью 18 в треугольную опору совместно с фермой 7, главным валом 3, Фермой 15 надстройки 2 (третий шар- . нирный треугольник).
Каждая плоская телескопическая ферма 5, 6, 7, 14, 15, 17 рабочего оборудования кинематически связана соответственно с индивидуальным приводом 19, 20, 21, 22, 23, 24, причем йерма 7 может быть выполнена жест- кой - нетелескопической, а следовательно, без привода 21.
Каждая плоская телескопическая ферма 5, 6, 7, 14, 15, 17 имеет возможность движения поступательно от минимума (сжатого состояния) до максимума (растянутого состояния) и - наоборот и качательных движений вокруг осей - шарниров 9, 10, 16, 18, 25 и главного вала 3, кроме того, эти же фермы по отношению друг к другу могут двигаться поступательно одновременно в одном направлении и в разных направлениях в зависимости от выбранной схемы копания (подъема).
Работа оборудования заключается в следующем.
В исходном состоянии ковш 8 находится на уровне плацирования, усилие напора рукоятки 4 осуществляется ма- нипуляцией движений телескопических ферм 5, 6, надстройка 2 с телескопическими фермами 14, 15 находится в крайнем нижнем положении (фермы сжаты) , подъемная тяга 1 с телескопи- ческой фермой 17 находится в крайнем верхнем положении (ферма растянута) или в среднем положении в зависимости от конструктивного исполнения.
При одновременном движении теле- скопических ферм 14, 15 надстройки 2 до крайнего верхнего положения (фермы растянуты) при неподвижной поступательно подъемной тяги 1 усилие подъема передается ковшу 8 через глав ный вал 3, рукоять 4, ось-шарнир 18, подъемную тягу 1, при этом траектория движения ковша осуществляется по кривой s полученной поступательным движением вверх, и качательным вокруг главного вала 3, подъемная тяга 1 получа- ет также качательное движение вокруг
оси-шарнира 16. Затем, манипулируя движениями одновременно при раздельно подъемной тяги 1 вниз до крайнего нижнего положения и телескопической фермы 6 на сжатие, ковш 8 выводится на максимальную высоту копания, вплоть до вертикального положения - при необходимости (крановый режим)«, При различных комбинациях движений ферм можно получать различные тректории движений ковша, расширяя технологические возможности регулируя силовые нагрузки на рабочее оборудование, получая переменную производительность, в зависимости от крепости разрабатываемой породы
Формула изобретения
Ю П
25
