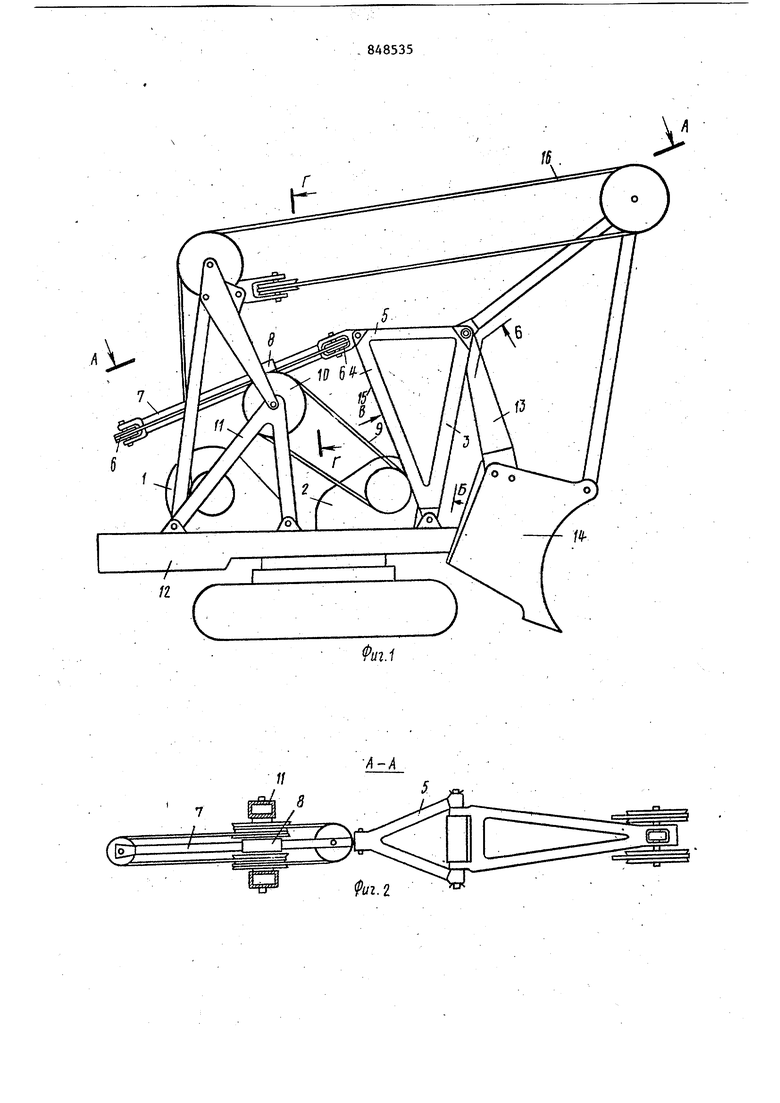
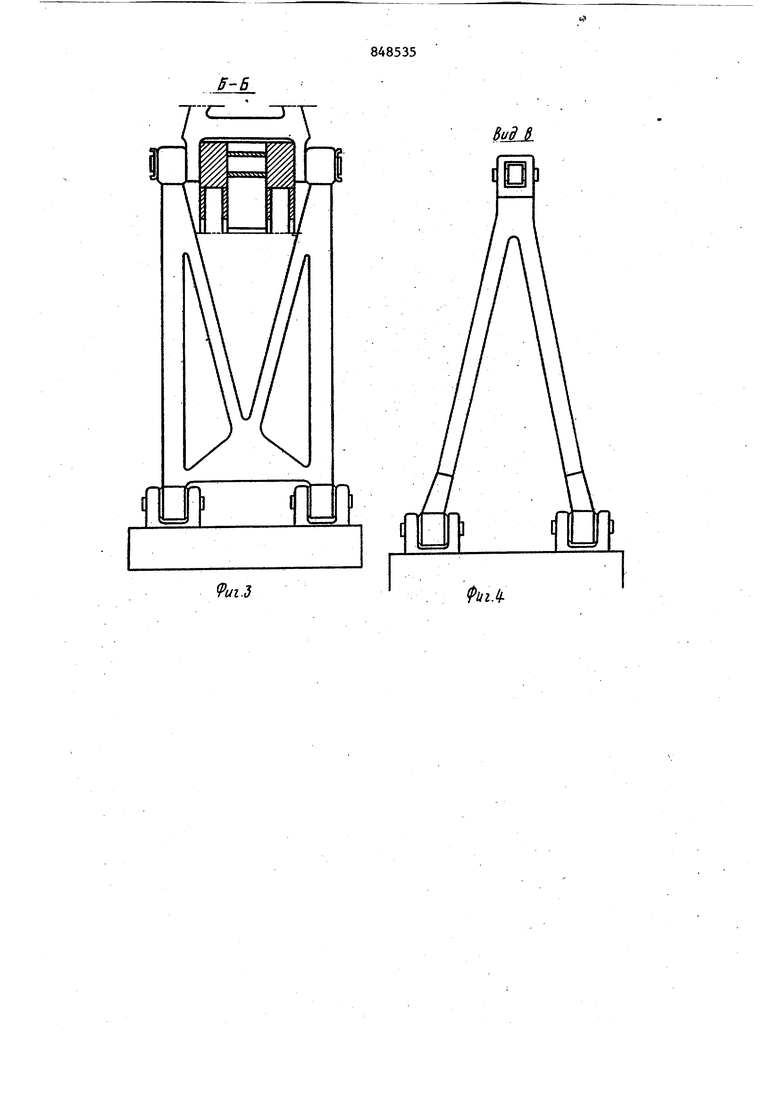
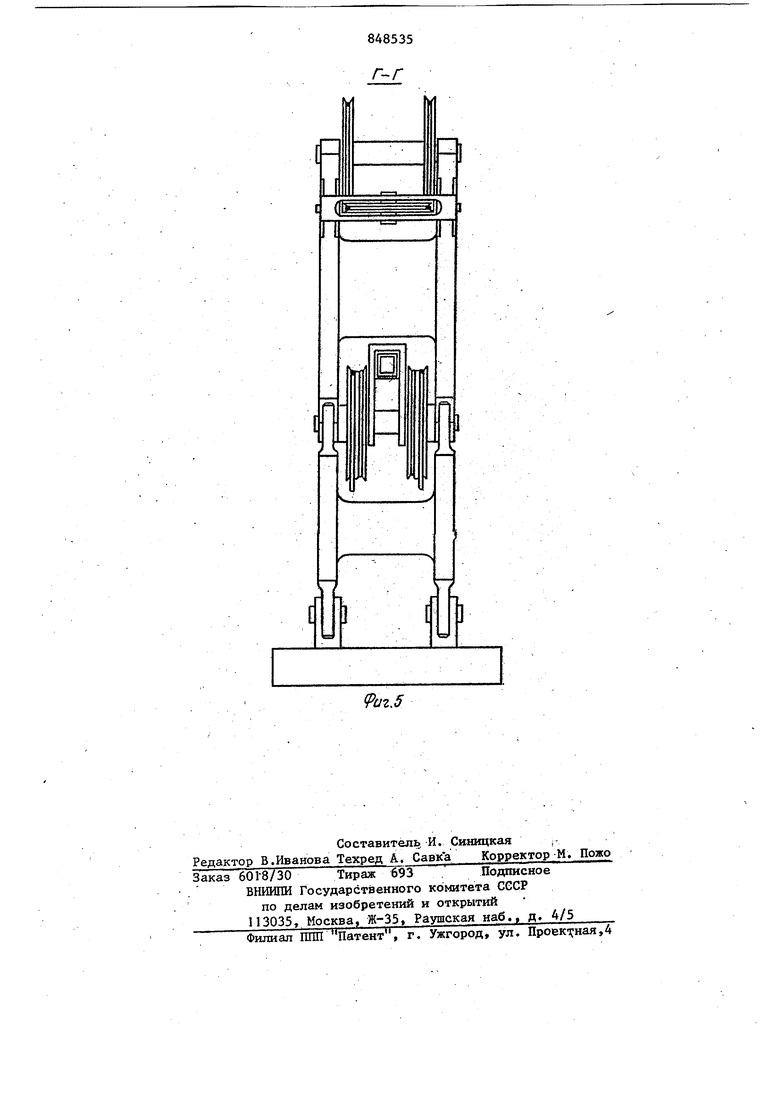
Изобретение относится к машинам для экскавации грунта. Известен экскаватор, включающий две качающиеся стойки, установленные на поворотной платформе в отдельных кронштейнах и соединенные канатами с подъемным и удерживающим копающими механизмами. Оригинальная кинематика рабочего оборудования и компоновка поворотной части данного экскаватора позволяют оснащать его ковшом примерно на 20% большей емкости, чем машины той же массы с традиционным рабочим оборудовагшем . Наиболее близким к предлагаемому является экскаватор, включающий под емный и удерживающий механизмы, качающуюся плоскую ферму, качающуюся стойку, подкосы и инекяций блоки напорный стержень, опирающийся на сед установленное вместе с огибаемыми к натами удерживающего механизма блоками, на удерживающей стойке, закрепленной к поворотной платформе, имеющей рукоять с ковшом. Подкосы, шарнирно соединенные с плоской фермой и треугольной стойкой, образуют надстройку машины. Плоская ферма и треугольная стойка надстройки, установленные в четырех кронштейнахна поворотной платформе вместе с подкосами и платформой, образуют четы1)ехзвенник, конфигурация которого при работе экскаватора изменяется 2. Однако в этом экскаватора усшше, удерживающее рабочее оборудование от поворота вперед, приведенное к вершине качающейся стойки, в ряде рабочих положений существенно тгревышает максимальное подъемное усилие на ковт ше.В результате мощность привода удерживающего механизма получается в три с лишним раза большей, чем мощность привода напора в экскаваторе традиционного исполнения с равной емкостью ковша. Кроме того, имеет место большая нагруженность удерживающего -механизма и связанных с ним несущих конструкций. Металлоемкость указанного механизма примерно в 1,4 раза больше чем у напорных механизмов в тради- . ционньгх схемах экскаваторов. Износ восьми нагруженных шарнирHbtx соеданений надстройки, возникающий из-за геометрической изменяемости конструкции, масса шарнирных соединений надстройки и четырёх ее опор ных кронштейнов, составляющая пример но 20% массы надстройки, не удовлетворяет требованиям, предъявляемым к данной технике. Цель изобретения - уменьшение мас сы экскаватора и количества шарнирны .соединений. Эта цель достигается тем, что в экскаваторе плоская ферма, качающаяся стойка и подкосы, жестко соединены между собой и образуют надстройку в виде пирамиды с четырехугольной ст роной . . На фиг. 1 показан экскаватор-лопата; на фиг. 2 - сечение А-А на фиг.1; на фиг. 3 - сечение Б-Б на фиг.15 на фиг. 4 - вид В на фиг.1; на фиг. 5 - сечение Г-Г на фиг. 1. Экскаватор-лопата включает подъем ный и удерживающий механизмы 1 и 2, качающуюся плоскую ферму 3, качающую ся стойку 4, подкосы 5 и имеющий бло ки 6 напорный стержень 7, огшрающийся на седло 8, установленное с огибаемыми канатами 9 удерживающего механизма 1, блоками 10:на удерживающей стойке 11, закрепленной на поворотной платформе 12, рукоять 13 с ко шом 14. Плоскаре ферма 3, качающаяся стойка 4 и подкосы 5 жестко соединен между собой и образуют надстройку в виде пирамида с четырехуголь ной ст роной 15. Подъемный механизм имеет канат 16. Экскаватор работает следующим образом. С помощью подъемного и удерживающего Механизма надстройка и рзпсоять с закрепленнымК ней ковшом поворачиваются в положение, при котором зубья ковша опускаются на забой в нужном месте. . В процессе поворота надстройки, и рукояти канат 16 подъемного механизма и один из канатов 9 удерживающего механизма растянуты. 5Л Расчеты показывают, например, что: в рабочих положениях с максимальным наклоном надстройки вперед растянут канат удерживающего механизма. В результате максимальные усилия в ка-, натах удерживающего, механизма уменьшаются и уменьшается установочная мощность двигателей удерживающего механизма и нагруженность соответствующих несупц1Й конструкций. Копание в нижней части забоя осуществляется с помощью удерживающего механизма при повороте надстройки на осях вперед. Наполнение ковша происходит по мере его перемещения от гусениц и вверх. Копание вдоль траекторий близких к цилиндрическим осуществляется с помощью подъемного механизма, повороте рукоятки с подъемной стойкой, подъемной тягой и ковшом относительно главного крепления рукояти. Разгрузка производится через днище ковша в положениях рукояти, близких горизонтальному. В предлагаемом экскаваторе над. стройка геометрически неизменяема и опирается на два кронштейна вместо четырех. Количество изнашиваемых шарнир- . ных соединений надстройки уменьшено в четыре раза. Формула изобретения Экскаватор-лопата, включающий подъемный и удерживаюшда механизмы, качающуюся плоскую ферму, качающуюся стойку, подкосы и имеющий бл1оки напорньй.стержень, опирающийся на седло, установленное с блoкa Ф -, огибаемыми канатами -удерживающего механизма, на у;держиваюш;ей стойке,закрепленной на поворотной платформе,имеющей рукоять с ковшом, о т л и ч а ющ и и с я тем, что, с целью уменьшения массы экскаватора, плоская .ферма, качающаяся стойка и подкосы жестко соединены между собой и образуют надстройку в виде пирамиды с четырехугольным ocHOBai-meM. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3501034, кл. 214-138, опублик. 1970. 2.Авторское свидетельство СССР № 663785, кл.-Е,02 F 3/38, 1976 (прототип) .
9ui.3
BulA

| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование экскаватора | 1981 |
|
SU1033646A1 |
| Экскаватор-лопата | 1976 |
|
SU663785A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| Экскаватор и его поворотная платформа | 1986 |
|
SU1379412A1 |
ш
т
