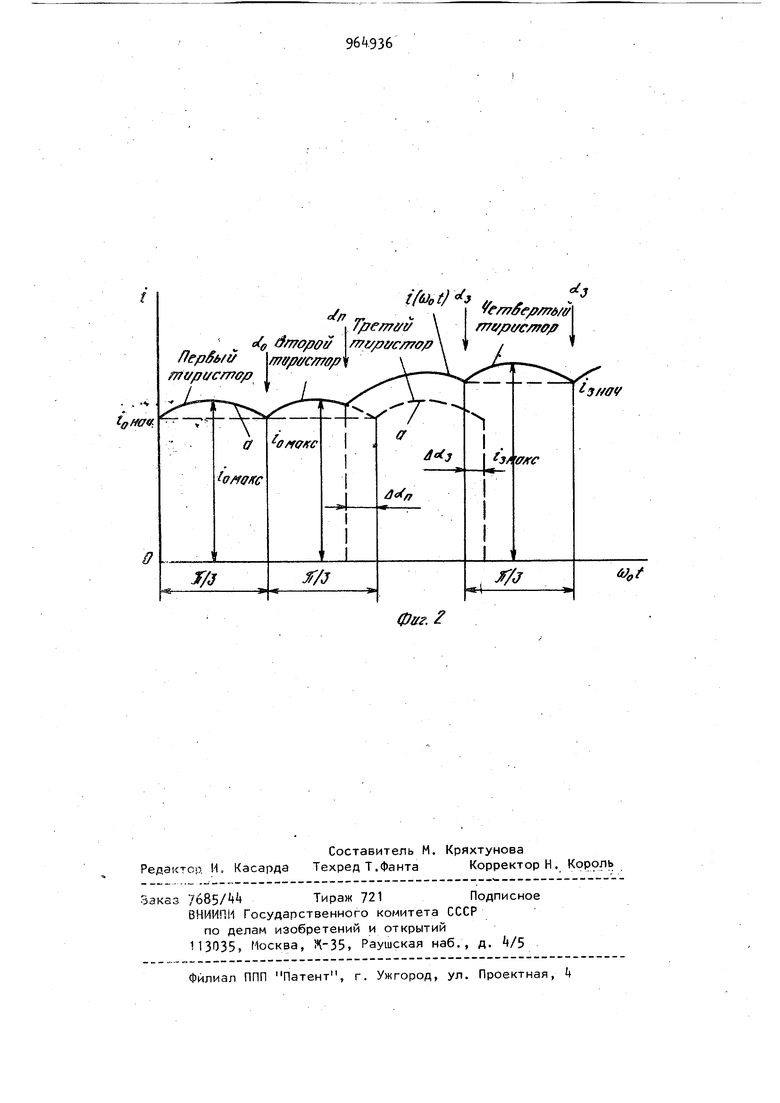
Изобретение относится к электроте нике, а именно к технике автоматического управления и регулирования тиристор| ого электропривода, в том числе с применением управляющих вычислительных машин. Известны устройства для регулирования скорости электродвигателя постоянного тока, получающие питание от тиристорного преобразователя, содержащие цифровой вычислительный блок, включенный во внешний контур устройства, дискретный датчик скорости и блок задания 0Однако в этих устройствах регулятор тока является аналоговым и .поэто му управление током с предельным быстродействием не может быть реализовано. Наиболее близким по технической сущности к предлагаемому является устройство для регулирования скорост электродвигателя, содержащее преобразователь, к выходу которого подключена якорная обмотка электродвигателя цифровой вычислительный блок, к входам которого подключены датчики скорости и тока якоря электродвигателя, блок задания и блок синхронизации, выход через блок управления подключен к преобразователю. В цифровом вычислительном блоке устройства по сигналам задания и обратной связи по скорости определяется заданная величина среднего тока якоря, которая сопоставляется с измеренной датчиком величиной среднего токаза интервал проводимости тиристора и по их разности находится угол управления тиристора, включение в работу которого происходит через интервал проводимостиНедостатками этого устройства является то, что измерение среднего тока дискретным датчиком Среднего тока, осуществляющим интегрирование мгновенных значений тока в течение интервала проводимости тиристора. заканчивается лишь в момент прекращения протекания .тока мерез данный ;тиристор вследствие включения :ту очередного тиристора. Поэтому если окажется, что .измеренная величина среднего тока отличается от заданной, изменить угол управления устройства в состоянии только для последующего тиристора, т.е. с запаздыванием, равным отношению периода питающего тиристорный преобразователь напряжения к пульсности преобразователя ((запаздывание для трехфазной мостовой схемы составляет , что соответствует 60 эл.град Запаздывание в цепи регулирования тока приводит к понижению быстродействия устройства, снижению запаса устойчивости и появлению областей неустойчивой работы. Кроме того, запаздывание информации о величине среднего тока не позволяет осуществить предельное по быстродействию , изменение тока тиристорного преобразователя. Цель изобретения - повышение быстродействия. Поставленная цель достигается тем, что в устройстве для регулирования скорости электродвигателя датчик тока выполнен в виде датчика мак симального тока за интервал проводимости тиристора, а цифровой вычислительный бло.к содержит узлы измерения мгновенной скорости, формирования заданного среднего тока, сравнения, сложения, вычитания, умножения , деления, оперативной памяти, памяти постоянных величин, выработки управляющих импульсов блока и шесть коммутаторов, причем первый вход пе вого узла сравнения подключен к выходу датчика максимального тока, а второй вход связан с узлом памяти постоянных величин, первый выход узл сравнения соединен с первым коммута тором и узлом выработки управляющих импульсов, а второй выход связан с вторым коммутатором, первый и второ входы первого узла вычитания соединены соответственно с датчиком максимального тока и узлом памяти постоянных величин, выход подключен к второму входу второго коммутатора, второй вход первого коммутатора свя зан с выходом датчика максимального тока,вход узла еления подключен к вых ду первого коммутатора, входи втор го узла сравнения соединены соответственно с выходами уЗла деления, второго коммутатора и узла формирования задания среднего тока, первый выход второго узла сравнения связан с узлом сложения, а второй соединен с входом третьего коммутатора, второй узел вычитания одним входом подключен к выходу третьего коммутатора, а другим связан с узлом формирования заданного среднего тока первый вход которого подключен к узлу измерения мгновенной скорости, а второй - к блоку задания, другие входы тТэетьего ком(утатора соединены соответственно с выходами второго коммутатора и узла деления, первый и второй узлы умножения связаны с выходбм второго узла вычитания и с узлом памяти постоянных величин, Первого узла умножения соединен с входом четвертого коммутатора, выход второго узла умножения связан с входом пятого коммутатора, выходы четвертого и пятого коммутаторов подключены соответственно к входам узла сложения, выход узла сложения соединен с входом узла оперативной памяти, первый выход узла оперативной памяти подключен к одному из входов узла сложения, а второй выход соединен с первым входом шестого коммутатора, второй вход связан с блоком синхронизации, шестой коммутатор подключен к блоку управления, -первый вход узла выработки управляющих импульсов связан с датчиком максимального тока, а второй вход подключен к первому узлу сравнения, управляющие выходы узла выработки управляющих импульсов связаны с соответствующими входами первого, второго, третьего , четвертого и пятого коммутаторо а. Дискретный датчик максимальноРо тока служит для замера максимальной величины тока на интервале проводимости тиристора. Датчик подключен к цифровому вычислительному блоку, в котором по замеренному датчиком максимальному току определяется с опережением прогнозируемая величина среднего тока за этот же интервал которая будет достигнута к концу интервала проводимости квазиустановившегося режима, в котором угол управления для последующего тиристора такой же, как у предыдущего. На фиг. 1 представлена схема устройства; на фиг. 2 - диаграммы, поясняющие его работу. 5 Устройство содержит преобразова- тель 1, к выходу которого подключенагякорная .обмотка электродвигателя цифровой вычислительный блок к входам которого подключены датчик k скорости, датчик 5 максимального тока электродвигателя 2, подключенный через шунт 6 к якорной цепи электродвигателя 2, блок 7 задания и блок 8 синхронизации. Выход вычислительного блока 3 через блок 9 управлемия подключен к преобразователю 1. .Второй вход блока 9 управления подключен к выходу блока 8 синхронизации, вход которого подключен к источ нику питания преобразователя 1. Вход узла 10 измерения мгновенной скорости соединен с датчиком скорости, а его выход - с узлом It формирования заданного среднего тока, второй вход которого подключен к бло ку 7 задания, Первый узел 12 сравнения одним входом связан с датчиком 5 максимального тока, а другим - с узлом 1Я памяти постоянных величин. Первый Выход узла 12 сравнения сое динен с первым коммутатором If и узг выработки управляющих импульсов а второй - с вторым коммутатором 16. Узел 17 вычитания соединен с датчиком 5 максимального тока и с узлом 13 памяти постоянных величин. Выход узла 17 вычитания подключен к второму входу коммутатора 16. Второй вход первого коммутатора 1 связан с выходом датчика 5 максимального тока. .Узел 18 деления связан с выходом первого коммутатора Т. Второй узел 19 сравнения соединен с выходами узла 18 деления, второго коммутатора 16 и узла 11 формирования задания среднего тока. Первый выход узла 19 сравнения связан с узлом 20 сложения а второй - с входом третьего коммута тора 21. Второй узел 22 вычитания од ним входом подключен к выходу третье го коммутатора 21, а другим - к узлу 11 формирования заданного среднего тока. Другие входы третьего коммутатора соединены с выходами второго ко мутатора 16 и узла ,18 деления. Первый и второй узлы23 и 2 умножения связаны с выходом узла 22 вычитания с узлом 13 памяти поотоянных величин Выход первого узла 23 умножения сое динен с входом четвертого коммутатора 25, выход второго узла 2 умножения - с входом пятого коммутатора 26 6 ,6 Выходы коммутаторов 25 и 26 подключены к входам узла 20 сложения. Узел сложения соединен с узлом 27 оперативной памяти, который подключен к шестому коммутатору 28. Шестой коммутатор 28 соединен выходом с блоком 9 управления и входом- с блоком 8 синхронизации. Узе:л 15 выработки управляющих импульсов связан с датчиком 5 максимального тока, а его управ ляющие выходы А,В,С,Д - с соответствующими входами коммутаторов 1,16,21 25 и 26. Устройство работает следующим образом, Пусть привод работает в квазиустановившемся режиме с некоторой угловой скоростью двигателя 2, углом управления тиристоров преобразователя 1 и средним током якорной цепи. За начало отсчета {фиг.2) по оси абсцисс принято начало интервала проводимости очередного тиристора преобразователя 1, работакхцего в квазиустановившемся режиме с углом управления тиристором о одинаковой величиной тока в начале и конце интервала проводимости, равно(1 IOHO максимальным значением тока на интервале соответствующим ему средним током оср длительностью интервала проводимости для трехфазной мостовой схемы) И . Если не изменять угол управления, то график тока соответст-, вует линиям а. . Пусть .второй тиристор включился в работу с тем же углом управленияс о что и первый, и к этому моменту времени поступило задание на новое значение среднего тока оср достижения нового, большего по величине, тока, потребуется уменьшить угол управления тиристоров. Однако заданный ток будет достигнут при этом через достаточно большое число интервалов проводимости, так как якорная цепь в режиме непрерывных токов представляет собой апериодическое звено с постоянной времени Т. Для достижения предельного быстродействия требуется осуществить форсировкуоткрыть очередной тиристор с переходным углом , меньшим заданного, а следующий тиристор - уже с заданным углом oty ППереходный- угол упраЁ(ления записывается . (р - приращение переходного углауправления; - соответствует переходу от меньшего к большему току; - обратному переходу. Цифровой вычислительный бвок -3 во время работы второго тиристора получает информацию от датчика 5 максимального тока о величине оллсякс определяет по ней средний ток i,-, который будет к концу интервала проводимости, если третий тиристор вклю чить в работу с начальным углом сС (пунктирная линия на фиг.2). сравнивает ее с новым поступившим заданием Зср находит приращение среднего тока Лср зср оср (2) по которому определяется прира1чение переходного угла управления До4д для третьего тиристора и заданный угол oi-t, или приращение заданного угла управления для четвертого тиристора, значения углов управления е/р и ot Передаются блоку 9 управления для исполнения. Начала отсчета углов управления берется по сигналам.блока 8 синхронизации. Работа устройства происходит циклически по сигналам от датчика 5 мак
симального тока. В момент поступления сигнала о достижении током максимального значения от датчика 5 максимального тока его величина сравнивается в узле 12 с величиной граничного максимального тока, записанной в узле 13 памяти постоянных величин, где определяется .таким образом режим работы преобразователя. При прерывистом токе сигнал максимального значения тока поступает че-, рез коммутатор к узлу 18 где определяется соответствующее ему значение среднего тока в зоне прерыэистых токов. В зоне непрерывного гока сигнал максимального значения тока подается на первый вход узла 17 вычитания, на другой вход которого поступает свободная составляющая из узла 15 памяти постоянных величин. Определенное среднее значение тока через коммутатор 16, либо от блока 18 деления поступает к узлу 19 сравнения, где оно сравнивается с заданным током из узла 11 формирования задания среднего тока. В случае равенства заданного и фактического значений узел управления, записанный в узле 27i оперативной памяти, не меняется.
полненныи, например, в виде кольцевого регистра. До прихода импульса от датчика 5 узел 15 находится в исходном состоянии. При получении си|- нала от датчика 5 узел 15 последовательно вырабатывает k импульса - А,В, С,Д, разрешая этим последовательно работу первого 1 и второго 16 коммутаторов (импульс А), третьего коммутатора 21 (импульс В), четвертого коммутатора 25 (импульс С) и пятого коммутатора 26 (импульс Д). После этого узел 15 снова приходит в исходное состояние. При работе в зоне
5 прерывистых токов вычислять прира(цение переходного узла &с1п не надо, поэтому импульс С следует г.пропустить. ;Для этого узея 15 связан с выходом первого узла 12 сравнения, принимающим единичное значение в зоне прерывистых токов При получении этого сигнала импульс С с блока 15 не вырабатывается . При приходе очередного импульса от датчика 5 тока работа блока 3 происходит аналогично.
При определении углов управления отработке их блоком 9 управления переходный процесс заканчивается за один интервал проводиВ случае неравенства токов измеряемая величина среднего тока поступает через коммутатор 21 к первому входу узла 22 вычитания, на другой вход которого подается сигнал о заданной величине тока от узла 11. Сигнал рассогласования по току поступает к блокам 23 и 2k умножения, в которых по рассогласованию вычисляются величины приращений углов переходного До(п и заданного Act . Для этого к блокам умножения поступают из блока 13 памяти величины коэффициентов. Рассчитанная величина uolf, через коммутатор 25 поступает к сумматору 20, где суммируется с начальным углом о , полученная величина ctn запоминается в узле 27 оперативной памяти. Аналогично происходит севеличиной До , об разующейся на выходе узла 2k умножения - при помощи коммутатора 2б, сумматора 20 и узла 27 памяти, в котором запоминается величина сС-, По сигналам блока 8 синхронизации через выходной коммутатор 28 рассчитанные величины оСп и сС последовательно передаются к блоку 9 управления. Для управления последовательностью вычислений в блоке 3 предназначен узел 15 управляющих импульсов, вымости тиристоров (за время работы третьего тиристора, т.е. происходит с предельным быстродействием. С момента включения четвертого тиристора начинается новый квазиустан вившийся режим с углом управления ot- , максимальной величиной тока iw«Kii соответствующим ей средним то ком i . В .начале и конце интервала проводимости тиристора ток.равен iay,(,,f Переход от большего значения к меньшему происходит аналоги но изображенному на фиг.2, при этом приращения uoL, и ad, будут положительными. В том случае, когда в исходном квазиустановившемся режиме ток является прерывистым и поступило задание на увеличение тока до некоторого непрерывного тока i;jcp сущность указанного лредельного по быстродействию управления током якорной цепи не меняется. Однако отноше ние приращения среднего значения тока при переходе от начального к заданному квазиустановившемуся per жиму к приращению переходного угла упоавления Ло(п будет другим: обозначим это отношение коэффициентом k. Определение приращения переходного угла управления происходит по соотношениюМп k -uicp При изменениях внутри зоны прерывистых токов заданная величина среднего тока достигается при включении в работу очередного тиристора с новым заданным значением угла управления, так как якорная цепь в режиме прерывистых токово - безынерционное звено. Таким образом, благодаря измерению с опережением величины среднего тока появляется возможность при его отклонении от заданного без запаздывания приступить к устранению рассогласования путем воздействия на угол управления очередного тиристора и при этом осуществить предельное по быстродействию управление током якорной цепи. Предлагаемое устройство обеспечивает построение систем прямого цифрового управления электроприводом постоянного тока и комплектных тирис торных приводов на их основе с высокими динамическими характеристиками быстродействием и конечной длительностью переходного процесса, причем 610 в качестве цифрового вычислительного блока может быть использован микропроцессор. Формула изобретения Устройство для регулирования скорости электродвигателя, содержащее преобразователь, к выходу которого подключена якорная обмотка электродвигателя, цифровой вычислительный блок, к входам которого подключены датчики скорости и тока якоря электродвигателя, блок задания и блок синхронизации, а выход через блок управления подключен к преобразователю отличающееся тем, что, с целью повышения быстродействия, дат чик тока выполнен в виде датчика максимального тока.за интервал проводимости тиристора, а цифровой вычислительный блок содержит узлы измерения мгновенной скорости, формирования заданного среднего тока, сравнения, сложения, вычитания, умножения деления, оперативной памяти, памяти постоянных величин, выработки управляющих импульсов блока и шесть ком мутаторов, причем первый вход первого узла сравнения подключен к выходу датчика максимального тока, а второй вход связан с узлом памяти постоянных величин, первый выход узла сравнения соединен с первым коммутатором и узг лом выработки управляющих импульсов, а второй выход связан с вторым коммутатором, первый и второй входы первого узла вычитания соедин ены соответственно с датчиком максимального тока и узлом памяти постоянных вели чин, выход подключен к второму второго коммутатора, второй вход первого коммутатора связан с выходом датчика максимального тока, вход узла деления подключен к выходу первого коммутатора, входы второго узла сравнения соединены соответственно с выходами узла деления, второго коммутатора и узла формирования задания среднего тока, первый выход второго узла сравнения связан с узлом сложения , а второй соединен с входом третьего коммутатора, второй узел вычит ния-одним-входом подключен к.выходу третьего коммутатора, а другим связан с узлом формирования заданного среднего тока, первый вход которого подключен к узлу измерения
мгновенной скорости, а второй - к блоку задания, другие входы третьего коммутатора соединены соответственно с выходами второго коммутатора и узла деления первый и второй узлы умножения связаны с выходом второго узла Вычитания и с узлом памяти постоянных величин, выход первого узла умножения соединен с входом четвертого коммутатора, выход второго узла умножениясвязан с входом пятого коммутатора, выходы четвертого и пятого коммутаторов подключены соответственно к входам узла сложени выход узла сложения соединен с входом узла оперативной памяти. Первый выход узла оперативной памяти подключен к одному из входов узла сложения, а второй выход соединен с первым входом шестого коммутатора, второй вход связан с блоком синхронизации, шестой коммутатор подключе к блоку управления, первый вход узла выработки управляющих импульсов связан с датчиком максимального тока, а второй вход подключен к первому узлу сравнения, управляющие выходы уйла выработки управляющих импульсов связаны с соответствующими входами первого, второго, третьего, четвертого и пятого коммутаторов.
Источники информации, принятые во внимание при экспертизе
1.Силаев Э. Ф. Неймарк В. Е.
и др. Система регулирования частоты вращения тиристорного электропривода постоянного тока в ЭВМ. Сборни Электротехническая промышленность Серия Электропривод, вып. 9(80, 1979.
2.Авторское свидетельство СССР № 738080, кл. Н 02 Р 5/06, 1977.
omfffonfffjf efffn a(ff fr f//}yC/77ff/) mff/y&cffro/} mypi/crrfffp
. f
tgWfy,
и .Tfjemfft/
Фиг. r77e/p(/c/7fo/f I I/



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода | 1989 |
|
SU1644345A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Устройство управления моталкой сортового стана | 1984 |
|
SU1199335A1 |
| Цифровой позиционный электропривод | 1981 |
|
SU1029366A1 |
| Способ пуска параллельного инвертора тока | 1985 |
|
SU1283916A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Устройство для контроля случайных процессов с помехами | 1989 |
|
SU1741157A1 |