1
(21)4602345/08
(22)10010о88
(46) 30.04„910 Бюл0 № 16
(72) ЕоАоСазо нов и С.Н0Беляев
(53) 621о941(08808)
(56) Авторское свидетельство СССР
№ 1294487, кл„ В 23 В 5/00, 1987.
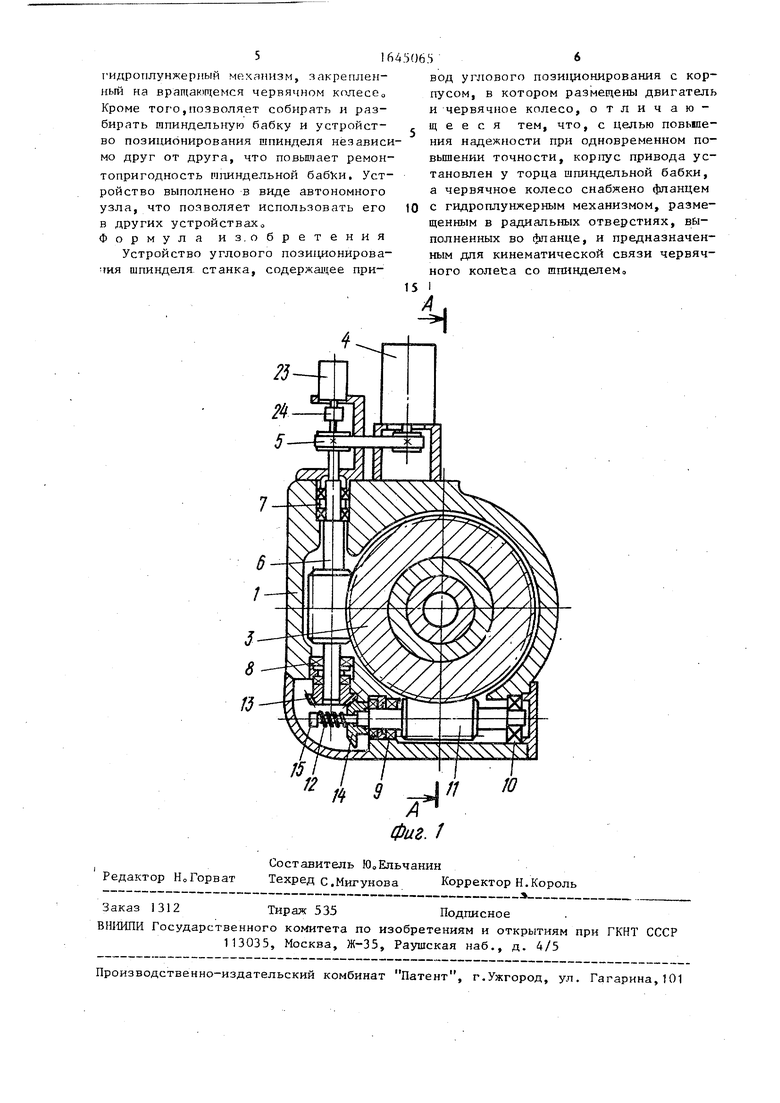
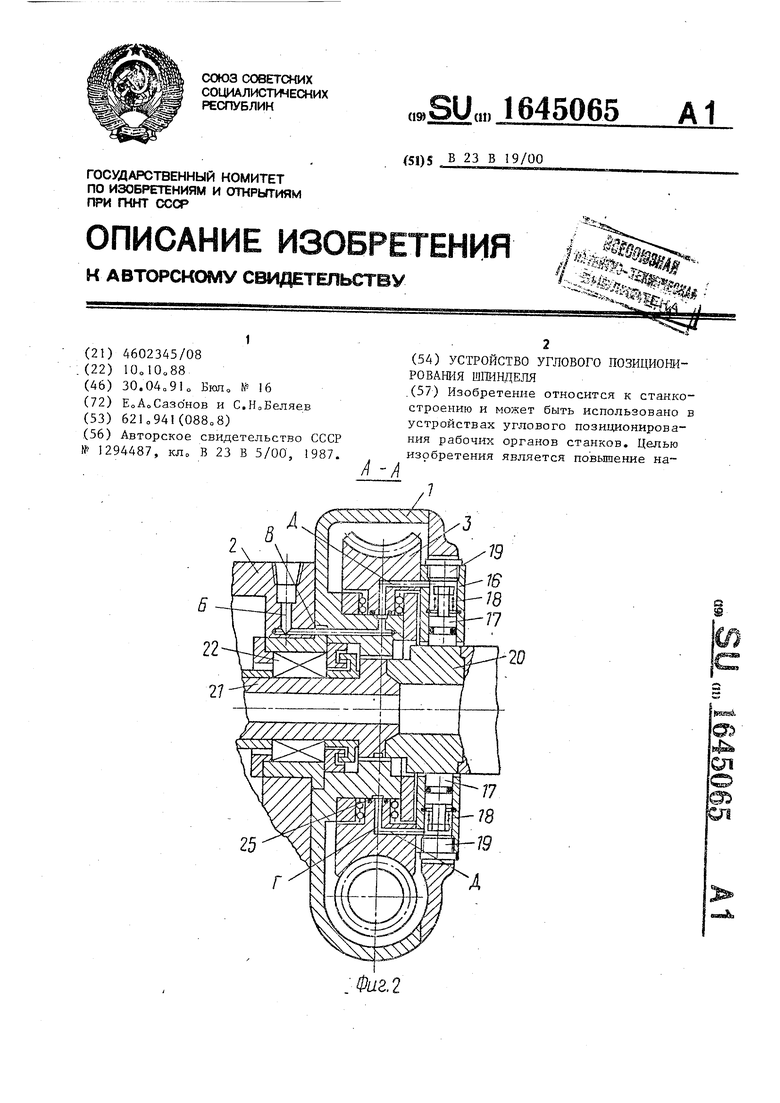
А-А
«
2
(54) УСТРОЙСТВО УГЛОВОГО ПОЗИЦИОНИРОВАНИЯ ШПИНДЕЛЯ
(57) Изобретение относится к станкостроению и может быть использовано в устройствах углового позиционирования рабочих органов станков. Целью изобретения является повышение на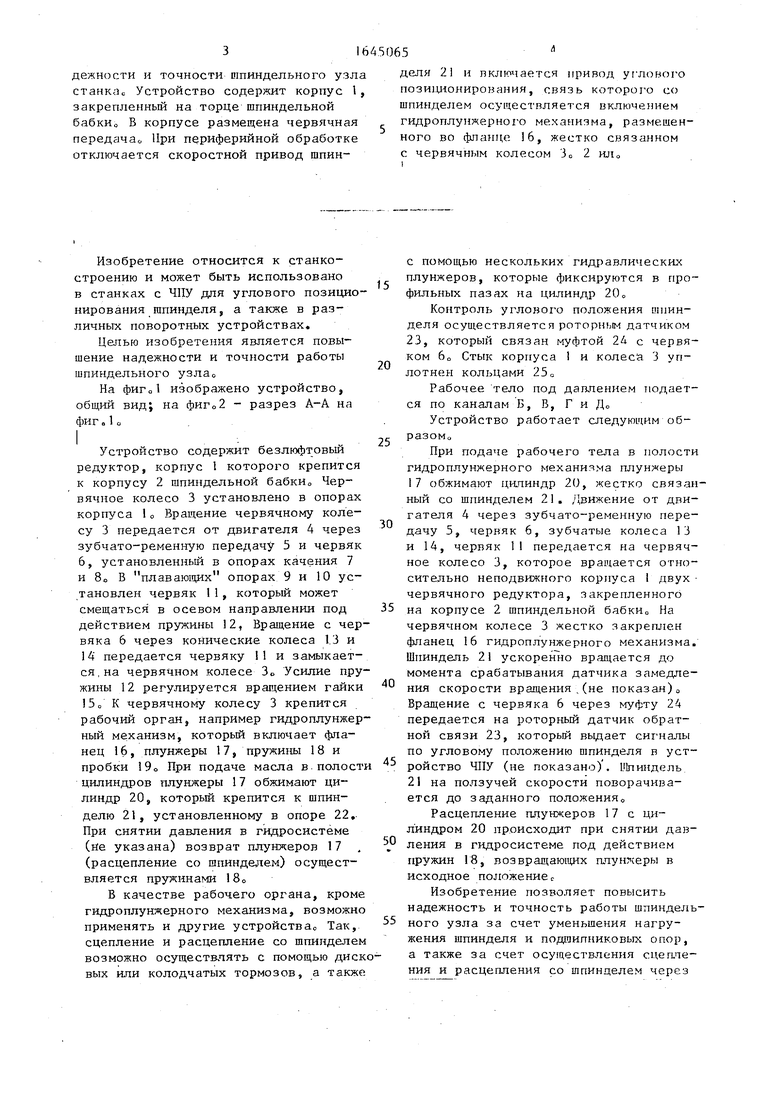
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельная бабка токарного многоцелевого станка | 1990 |
|
SU1792807A1 |
| Токарный многооперационный станок | 1988 |
|
SU1645059A2 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
| Устройство для угловой ориентации шпинделя металлорежущего станка | 1991 |
|
SU1794595A1 |
| ШПИНДЕЛЬНАЯ БАБКА | 1990 |
|
RU2027559C1 |
| ТОКАРНЫЙ СТАНОК | 1995 |
|
RU2087263C1 |
| Устройство для автоматической смены инструмента на металлорежущем станке | 1984 |
|
SU1252113A1 |
| Револьверная головка | 1989 |
|
SU1763098A1 |
| Устройство для угловой ориентации шпинделя металлорежущего станка | 1990 |
|
SU1773676A1 |
| Устройство для поворота и фиксации бабки изделия | 1982 |
|
SU1047669A1 |
25
Г
. Фаг. 2
дежности и точности шпиндельного узла станкас Устройство содержит корпус 1, закрепленный на торце шпиндельной бабкИо В корпусе размещена червячная передача При периферийной обработке отключается скоростной привод шпинИзобретение относится к станкостроению и может быть использовано в станках с ЧПУ для углового позицинирования шпинделя, а также в различных поворотных устройствах.
Целью изобретения является повышение надежности и точности работы шпиндельного узла0
На фигЛ изображено устройство, общий вид; на - разрез А-А на фиг о 1и
Устройство содержит безлюфтовый редуктор, корпус 1 которого крепится к корпусу 2 шпиндельной бабки Червячное колесо 3 установлено в опорах корпуса 1 о Вращение червячному колесу 3 передается от двигателя 4 через зубчато-ременную передачу 5 и червяк 6, установленный в опорах качения 7 и 80 В плавающих опорах 9 и 10 установлен червяк 11, который может смещаться в осевом направлении под действием пружины 12, Вращение с червяка 6 через конические колеса 13 и 14 передается червяку 11 и замыкается, на червячном колесе 30 Усилие пружины 12 регулируется вращением гайки 50 К червячному колесу 3 крепится рабочий орган, например гидроплунжерный механизм, который включает фланец 16, плунжеры 17, пружины 18 и пробки 19 При подаче масла в полости цилиндров плунжеры 17 обжимают цилиндр 20, который крепится к шпинделю 21, установленному в опоре 22. При снятии давления в гидросистеме (не указана) возврат плунжеров 17 (расцепление со шпинделем) осуществляется пружинами 180
В качестве рабочего органа, кроме гидроплунжерного механизма, возможно применять и другие устройства0 Так, сцепление и расцепление со шпинделем возможно осуществлять с помощью дисквых или колодчатых тормозов, а также
64S065А
деля 21 и включается привод уелового позиционирования, связь которого со шпинделем осуществляется включением гидроплунжерного механизма, размешенного во фланце 16, жестко связанном с червячным колесом 30 2 ид
5
0
5
0
35
40
45
50
55
с помощью нескольких гидравлических плунжеров, которые фиксируются в профильных пазах на цилиндр 20„
Контроль углового положения шпинделя осуществляется роторным датчиком 23, который связан муфтой 24 с червяком 6 о Стык корпуса 1 и колеса 3 уплотнен кольцами 25 о
Рабочее тело под давлением подается по каналам Б, В, Г и Д0
Устройство работает следующим об- разомо
При подаче рабочего тела в полости гидроплунжерного механизма плунжеры 17 обжимают цилиндр 20, жестко связанный со шпинделем 21. Движение от двигателя 4 через зубчато-ременную передачу 5, червяк 6, зубчатые колеса 13 и 14, червяк 11 передается на червячное колесо 3, которое вращается относительно неподвижного корпуса 1 двух червячного редуктора, закрепленного на корпусе 2 шпиндельной бабки„ На червячном колесе 3 жестко закреплен фланец 16 гидроплунжерного механизма. Шпиндель 21 ускоренно вращается до момента срабатывания датчика замедления скорости вращения (не показан)0 Вращение с червяка 6 через муфту 24 передается на роторный датчик обратной связи 23, который выдает сигналы по угловому положению шпинделя в устройство ЧПУ (не показано). Шпиндель 21 на ползучей скорости поворачивается до заданного положения
Расцепление плунжеров 17 с цилиндром 20 происходит при снятии давления в гидросистеме под действием пружин 18, возвращающих плунхеры в исходное положение с
Изобретение позволяет повысить надежность и точность работы шпиндельного узла за счет уменьшения нагру- жения шпинделя и подшипниковых опор, а также за счет осуществления сцепления и расцепления со шпинделем через
25 24
