Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к способам стабилизации направления движения машинно-тракторных агрегатов.
Известен способ стабилизации направления движения МТА, при котором создают касательные силы тяги на движителях бортов путем равного распределения крутящего момента между ними. Вследствие того, что сцепные качества почвы являются случайной функцией ее физико-механических свойств, создаваемые касательные силы тяги разных-бортов при таком способе стабилизации направления движения МТА будут неодинаковыми.
Указанные свойства почвы не являются постоянными дауе в преоелах колеи энергосредства. При этом касательные силы тяги будут определяться не только подводимыми к движителям крутящими
моментами, а и условиями сцепления движителей с почвой, причем реализуемый в тягу крутящий момент будет определяться движителем, находяидомся в худших по сцеплению условиях. Это приводит к повышенному буксованию и, как следствие, уменьшению скорости поступательного движения, а также повышает склонность к боковому уводу.
Уменьшение поступательной скорости движения приводит к снижению производительности, увеличению погектарного расхода топлива и нарушению агротребоваНий по максимальному буксованию.
Существует способ стабилизации направления движения МТА, при котором создают касательные силы тяги на движителях бортов путем равномерного распределения мощности между ними. Такой способ характеризуется тем, что сила тяги МТА будет определяться суммой касательных сил тяги
««а
сл о
сл
движителей. Но так как касательная сила тяги каждого движителя будет определяться условиями его сцепления с почвой то касательные силы тяги по бортам будут не одинаковы, что приведет к появлению поворачивающего момента. Указанный момент вызывает неуправляемый поворот агрегата в сторону движителей, имеющих худшее зацепление с почвой, что приводит к ухудшению качества выполняемой технологической операции, повышению расхода топлива, уаеличению напряженности труда водителя, уменьшению производительности.
В качестве базового способа стабилизации направления движения МТА принят способ, при котором создают касательные силы тяги путем обеспечения равенства угловых скоростей ведущих колес при условии минимального отклонения органов управления направлением движения от положения, соответствующего прямолинейному движению.
Применение такого способа на полях с длинными гонами и выравненной поверхностью почвы позволяет повысить качество выполняемых технологических операций, уменьшить напряженность труда водителя Однако при сложной конфигурации полей этот способ нз применим, так как рассогласование угловых скоростей движителей раз- иых бортов приводит к появлению неуправляемых отклонений от заданного движения, а следовательно, ухудшается качество работы, повышается утомляемость водителя, повышается расход топлива
Известен способ стабилизации направления движения МТА, при котором касательные силы тяги выравнивают по движителям бортов путем обеспечения равенства их частот вращения независимо от направления движения. Такой способ применяют на полях оаялмчной конфигурации
В качестве недостатка такого способа следует отметить ухудшение управляемости знергосредстаа из-за увеличения момента сопротивления поворота. Кроме того, в нем не учитывается разность касательных сил тяги движителей разных бортов из-за различных почвенных условий, что приводит к неуправляемому повороту агрегата.
Целью изобретения является устранение недостатков прототипа и в первую очередь повышение курсовой устойчивости агрегата.
Предлагаемый способ содержит перечень операций, последовательность выпол- ,Нения которых позволяет в момент появления рассогласования угловых скоростей движителей буксующему колесному движителю сообщить осевое усилие, перпендикулярное заданному направлению движения, и складывать его с максимальным значением касательной силы тяги, возникающей при изменении режима качения этого колесного движителя по опорной поверхности по сравнению с режимом качения небуксующего движителя.
0Новыми существенными признаками
предлагаемого способа являются: сообщение буксующему движителю усилия, перпендикулярного заданному направлению движения и противоположного направле5 нию заноса, складывание осевого усилия с максимальным значением касательной силы тяги на буксующем движителе.
Введение новых существенных признаков позволяет в момент, предшествующий
0 заносу МТА, буксующему колесному движителю сообщить осевое усилие, перпендикулярное заданному направлению движения, и сложить его с максимальным значением касательной силы тяги, возникающей при
5 изменении режима качения этого колесного движителя по опорной поверхности по сравнению с режимом качения небуксующего движителя и тем самым повысить курсовую устойчивость агрегата в целом.
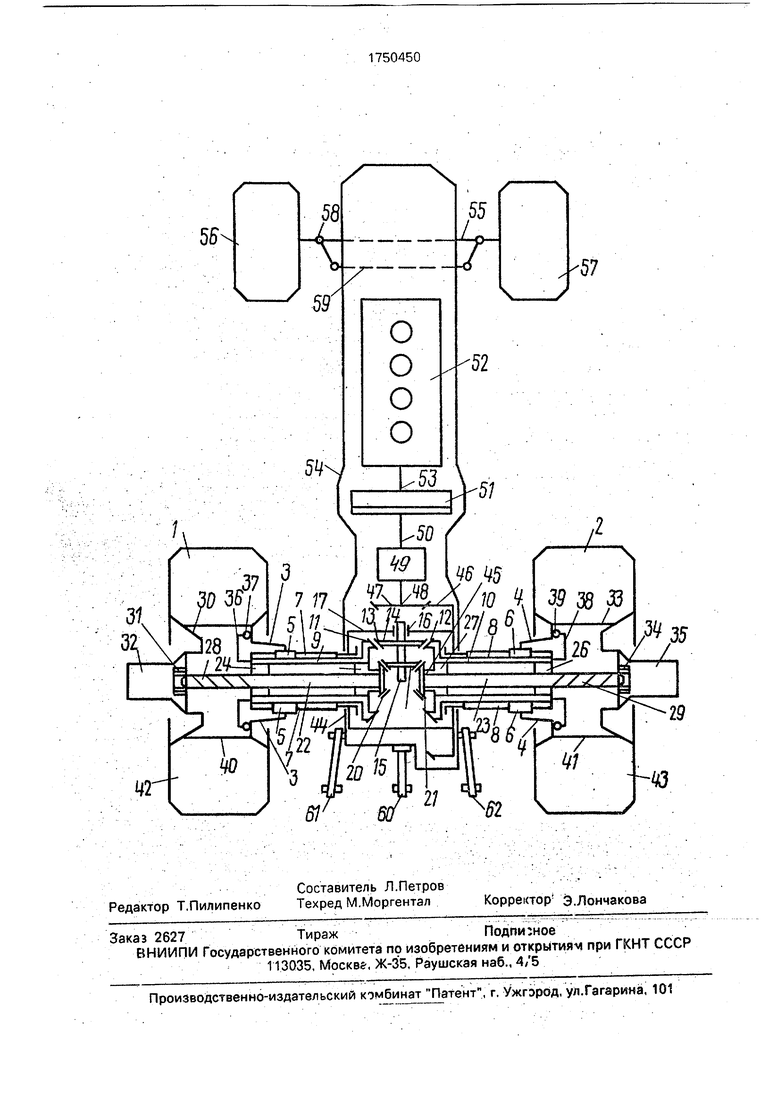
0На чертеже показан конкретный пример выполнения способа стабилизации направления движения машинно-тракторного агрегата, где 1,2 - колесный движитель; 3,4 - внутренние диски; 5,6 - направляющие; 7,8 5 шлицы; 9,10 - полуоси; 11,12 - зубья; 13 - зубья; 14 - сателлит; 15 - ось; 16 - подшипник; 17 - коробка дифференциала; 18 - шестерня- 19, 20, 21 - зубья; 22, 23 - винты; 24, 25 - подшипники; 26, 27 - подшипники; 28 0 правая резьба; 29 - левая резьба; 30 - Наружный диск; 31 - гайка; 32 - стакан; 33 - наружный диск; 34 - гайка; 35 - стакан; 36 - ограничитель; 37 - шаровая опора; 38 - ограничитель; 39 - шаровая опора; 40, 41 5 барабаны; 42, 43 - шины; 44 - кольцо; 45 - кольцо; 46 - шестерня: 47 - шестерня; 48 - вал; 49 - коробка передач; 50 - вал; 51 - сцепление; 52 - двигатель; 53 - вал; 54 - остов трактора; 55 - балка; 56, 57 - управля0 емые колеса; 58 - шарнир; 59 - поперечная рулевая тяга; 60 - центральная тяга; 61, 62 - боковые тяги.
Пример выполнения способа стабилизации направления движения машинно5 тракторного агрегата включает колесные движители 1 и 2 которые, внутренними дисками 3 и 4, направляющими 5 и 6 посажены на шлицы 1 и 8 полуосей 9 и 10. Зубья 11 и 12 полуосей 9 и 10 заиеплены с зубьями 13 сателлита 14, о:ь 15 которого закреплена в
подшипнике 16 коробки дифференциала 18, зубья 19 которой зацеплены с зубьями 20 и
21винтов 22 и 23. Указанные винты закреплены в подшипниках 24 и 25; 26 и 27. Подшипники 24, 25, 26, 27 распложены внутри полуосей 9 и 10 соответственно На винтах
22и 23 нарезана правая 28 и левая 29 резьбы соответственно. На наружном диске 30 закреплены гайка 31 с правой резьбой и стакан 32, а на наружном диске 33 закреплены гайка 34 и стакан 25. На полуось 9 надет ограничитель 36 с шаровой опорой 37, которая упирает во внутренний диск 3, а на полуось 10 надет ограничитель 37 с шаровой опорой 39, которая упирает во внутренний диск 4. Наружные 30 и 33 диски и внутренние 3 и 4 диски закреплены на барабанах 40 и 41, на которые надеты шины 42 и 43. Между зубьями 20 винта 22 и подшипником 25 расположено кольцо 44, а между зубьями 21 винта 23 и подшипником 27 расположено кольцо 45. На коробке дифференциала 17 закреплена шестерня 46, которая кинематически соединена с шестерней 47, Шестерня 47 валом 48 соединена с коробкой передач 49, которая валом 50 соединена со сцеплением 51 Крутящий момент от двигателя 52 на сцепление 51 передается валом 53. Двигатель 52, коробка передач 49, сцепление 51 и коробка дифференциала 17 закреплены на остове трактора 54. К остову трактора 54 прикреплена балка 55 с управляемыми колесами 56 и 57 и к балке 55 шарнирами 58 прикреплена поперечная рулевая тяга 59, а с противоположной стороны к остову трактора 54 прикреплены центральная тяга 60- и боковые 61 и 62,
Способ стабилизации направления движения МТА осуществляют следующим образом. При изменении режима качения одного из колесных движителей 1 или 2 (ухудшение сцепления одного из колесных движителей с опорной поверхностью), например, колесный движитель 2 попал на скользкий участок дороги или на участок почвы, физико-механические свойства которого по условиям сцепления отличаются от физико- механических свойств почвы под колесным движителем 1. В результате этого колесный движитель 2, как движитель с худшими условиями сцепления с почвой, начинает раскручиваться, что вызывает занос МТА в сторону буксующего движителя Для стабилизации заданного направления движения МТА резьбовой частью 29 винта 23 колесному движителю 2 сообщают осевое усилие, перпэндикулярное заданному напргвле- нию движения и складывают его с максимальным значением касательной силы тяги,
возникающей при изменении режима качения колесного движителя 2 и имеющей место на участке поч&ы с изменившимися физико-механическимм свойствами В процессе движения МТА складывают значение касательной силы тяги по условиям сцепления буксующего колесного движителя с почвой с осевым усилием, прикладываемым к буксующему движителю, направление которого противоположно направлению заноса МТА. Равнодействующая сложенных усилий будет направлена в сторону, противоположную заносу МТА, и будет способствовать стабилизации заданного направления движения МТА.
Устройство для стабилизации направления движения МТА работает следующим образом. При отсутствии отклонений показателей физико-механических свойств почвы под колесами движителями 1 и 2 МТА движется устойчиво, а соответствии с заданным направлением движения. Крутящий момент от движителя 52 посредством вала 53,
сцепления 51, вала 50 коробки передач 49 и вала 48 передается на шестерню 47, затем на шестерню 46 и коробку дифференциала 17 Так как сопротивление перекатыванию колесных движителей 1 и 2 одинаково, то
крутящий момент, подводимый от двигателя 52 к коробке диффернциала 17, будет распределяться между ними поровну. При этом сателлит 14 выполняет роль клина между зубьями 11 и 12 полуосей 22 и 23. Роль клина
между зубьями 20 и 21 выполняет и шестерня 18 с зубьями 19. При этом вращение от полуосей 9 и 10 посредством направляющих 5 и 6 передается внутренним дискам 3 и 4 барабанами 40 и 41. Вращающиеся диски 30 и 33 гайками 31 и 34 вызывают скручивание колесных движителей 1 и 2 с правой винтовой резьбы 28 винта 22 и с левой винтовой резьбы 29 винта 23. Ограничители 36 и 38 шаровыми опорами 37 и 39 ограничивают осевое перемещение колесных движителей по ПОЛУОСЯМ 9 и 10. При появлении отклонений показателей физико-механических свойств почвы под одним из движителей, например 2, по сравнению с
показателями физико-механических свойств почвы под другим движителем происходит его раскручивание, т.е. увеличение частоты вращения колесного движителя 2 по сравнению с частотой вращения колесного движителя 1. Происходит это следующим образом: крутящий момент от двига еля 52 посредством коробки передач 49 и вала 48 передается на шестерню 47, затем на шестерню 46 и коробку дифференциала 17. Уменьшение сопротизления перекатыванию колесного движителя 2 вызывает вращение оси 15 в подшипнике 16 и перекатывание зубьев 13 сателлита 14 по зубьям 11 полуоси 9. При этом полуось 10 получает большую частоту вращения по сравнению с частотой вращения полуоси 9 Вращение оси 15 вызывает вращение шестерни 18 и зубьями 19 посредством зубьев 21 вращение винта 23 с левой винтовой резьбой 29. Вин г 23 вкручивается в гайку 34 и прикладывает осевое усилие к наружному диску 33, барабану 41 и шине 43. Одновременно с этим полуось 10 шлицами 8 посредством направляющей 6 и внутреннего диска 4 вызывает вращение барабана 41, а вместе с ним и шины 43. Осевое усилие, прикладываемое винтом 23 к наружному диску 33, вызывает перемещение колесного движителя 2 к остову трактора 54 путем перемещения направляющих б по шлицам 8 полуоси 10, а вращение колесного движителя 2 полуосью 10 вызывает его скручивание гайкой 34 с левой резьбы 29 винта 23. В результате такого перечня операций происходит складывание осевого усилия, перпендикулярного заданному направлению движения, и максимального значения касательной силы тяги, имеющей место при качении буксующего колесного движителя по почве с изменившимися показателями физико-механических свойств. Результирующая сила направлена в сторону, противоположную заносу МТА, и способствует стабилизации заданного направления движения
Очевидно, что изобретение не ограничивается указанным примером его осуществления, исходя из него могут быть предусмотрены и другие варианты, не выходящие за рамки изобретения.
Формула изобретения
1.Способ стабилизации направления движения машинно-тракторного агрегата, включающий выравнивание скорости боковых движителей, отличающийся тем, что, с целью повышения курсовой устойчивости машинотракторного агрегата в момент, предшествующий его заносу, колесный движитель забегающего борта
перемещают по полуоси в сторону, противоположную закосу агрегата, путем накручивания этого движителя на полуось при его обкатывании по полуоси отстающего борта . до момента выравнивания частоты их вращения.
2.Устройство для стабилизации направления движения машинно-тракторного агрегата, включающее управляемые колеса, ведущие колесные движители, механизм
управления управляемыми колесами с дифференциалом, механизм распределения крутящего момента между колесными движителями и стабилизации частот вращения колесных движителей, отличающееся
тем, что,с целью повышения курсовой устойчивости агрегата, колесные движители своими полуосями и внутренними дисками кинематически связаны с дифференциалом при помощи шлиц, смонтированных на полуосях, и сателлита, смонтированного в подшипнике коробки дифференциала, а внутри полуосей размещены о подшипниках винты с разнонаправленной резьбой и зубьями, связанными с осью сателлита, при этом на
наружных дисках колесных движителей закреплены гайки с правой и левой резьбой соответственно на правом и левом колесном движителе, на полуоси надеты ограничители с шаровыми опорами, контактирующими с внутренними дисками.


| название | год | авторы | номер документа |
|---|---|---|---|
| "Способ стабилизации направления движения машинно-тракторного агрегата по методу "Инерционный парус" | 1988 |
|
SU1645180A1 |
| Способ стабилизации направления движения машинно-тракторного агрегата и устройство для его осуществления | 1990 |
|
SU1792584A1 |
| Транспортное средство повышенной проходимости | 1989 |
|
SU1676835A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| АЭРОМОБИЛЬ | 2019 |
|
RU2715099C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2005 |
|
RU2289519C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
Использование: в тракторном и сельско- хозяйственном машиностроении. Сущ- изобретения: колесные движители внутренними дисками и направляющими посажены на шлицы полуосей, зубья которых зацеплены с зубьями сателлита, ось 15 которого закреплена в подшипнике коробки дифференциала, зубчатым зацеплением эта ось сателлита соединена с зубьями винтов, закрепленных в подшипниках и расположенных внутри полуосей. На концах винтов нарезана резьба - правая и левая, при этом на наружном диске колесных движителей закреплена гайка с правой и лево резьбой соответственно на правом и левом колесном движителе, на полуоси надеты ограничители с шаровыми опорами, которые упираются во внутренние диски. 2 с.п.ф-лы, 1 ил.
| Мельников Д.И | |||
| Тракторы | |||
| М.: Колос, 1981, с | |||
| Котел | 1921 |
|
SU246A1 |
