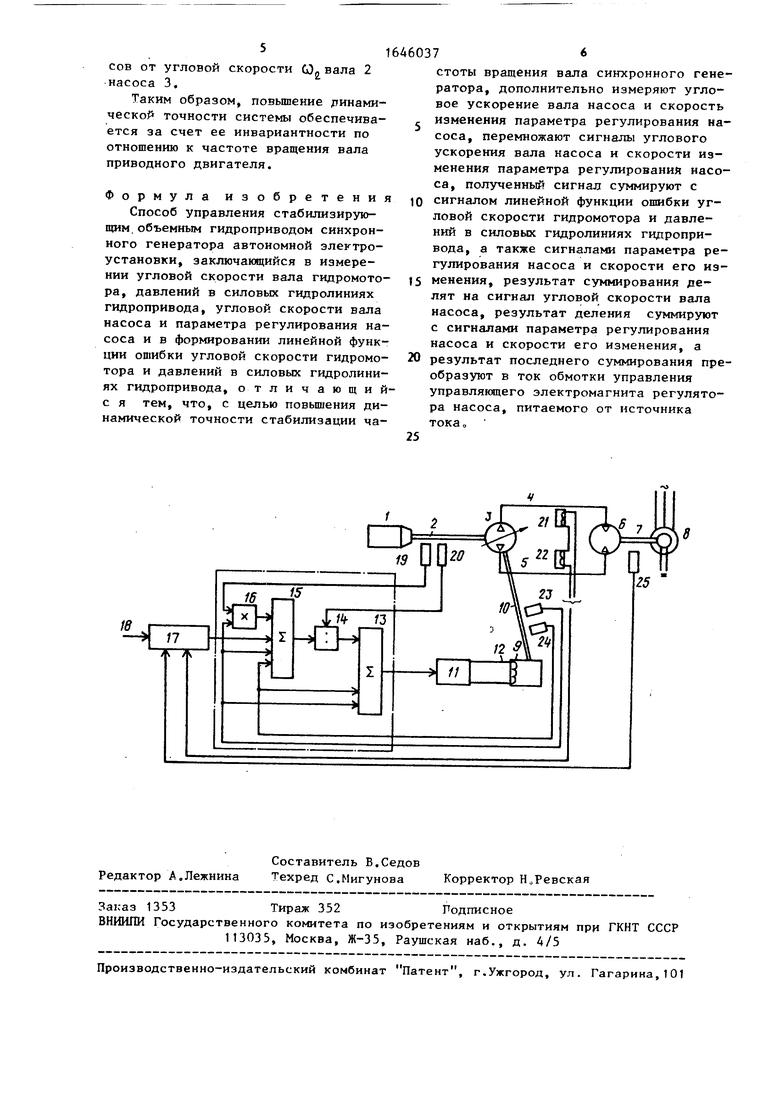
сумматор 13, выход которого связан с входом источника 11, блок 14 деления, выход которого связан с одним из входов сумматора 13, сумматор 15, выход которого связан с входом делимого блока 14 деления, блок 16 перемножения, выход которого связан с одним из входов сумматора 15, линейный регулятор 17, выход которого связан с одним из входов сумматора 15, а один из входов - с источником 18 управляющего воздействия, датчик 19 углового ускорения вала 2, выход которого связан с одним из входов бло- ка 16 перемножения, датчик 20 угловой скорости вала 2, выход которого связан с входом делителя блока 14 деления, датчики 21 и 22 давлений в гидролиниях 4 и 5, выходы которых свя- заны с одним из входов линейного регулятора 17, датчик 23 угловой скорости регулирующего органа 10, выход которого связан с входами сумматоров 13 и 15 и блока 16 перемноже- ния, датчик 24 углового положения ре- гулируклцего органа 10, выход которого связан с входами сумматоров 13 и 15, и датчик 25 угловой скорости вала 7, выход которого связан с одним из входов линейного регулятора 17.
Управление стабилизирующим объемным гидроприводом синхронного генератора автономной электроустановки осуществляется следующим образом.
Производят измерение угловой скорости Сх)7 вала 7 гидромотора 6, давлений Р и Р5 в силовых гидролиниях 4 и 5, угловой скорости вала 2 насоса 3, параметра регулирования е ,0 на- coca 3, характеризующего положение регулирующего органа 10, углового ускорения СО л вала 2 насоса 3 и скорости изменения параметра регулирования насоса 3, соответствующей угловой CKO рости регулирующего органа 10. Перемножают сигналы углового ускорения СО„ вала 2 насоса 3 с выхода датчика 19 и скорости изменения параметра регулирования насоса 3 с выхода датчика 23. Полученный сигнал суммируют сумматором 15 с сигналом линейной функции ошибки угловой скорости вала 7 гидромотора 6 и давлений в силовых гидролиниях 4 и 5 с выхода линейного регулятора 17, а также с сигналами параметра регулирования насоса е10 с выхода датчика 24 и скорости изменения параметра регулирования
Q
0 J
5
с выхода датчика 23„ Результат суммирования делят блоком 14 на сигнал угловой скорости вала 2 с выхода датчика 20. Результат деления суммируют с сигналами параметра регулирования е,0с выхода датчика 24 и скорости его изменения ё10 с выхода датчика 23. Результат последнего суммирования преобразуют в ток обмотки 12 управления управляющего электромагнита регулятора 9, питаемого от источника 11 тока.
Учитывая, что динамические свойства регулятора 9, состоящего из управляющего электромагнита, обмотка 12 управления которого питается от регулируемого источника 11 тока, и однокаскадного золотникового гидроусилителя, охваченного жесткой механической обратной связью, могут быть описаны дифференциальным уравнением .
Ve«+ o Kli-Koeie«. (1) где i - ток обмотки 12;
К - коэффициент усиления регулятора;
Тц - постоянная времени золотникового гидроусилителя; Кос- коэффициент обратной связи, и динамика изменения подачи насоса 3 описывается зависимостями:
.e,0.(2)
,,,; (3)
д3 Киё ОЈ+2Кие102+Кие,0Ц,Ка Шг . Ku-КоеСОг - -.i- -ею
тч
К ц.0)2
ч
Tl eto+2KKeuW otf2,
где К ц - характерный объем насоса,, сформировав управление в виде
ta iHE;V-M ° S +eu) + 1 ю +
1 2T.U. - (J2,ч
+ к е ° T5J (5)
где а,Ъ,с - постоянные коэффициенты, и - значение управляющего
воздействия 18,
при малых значениях COg, характерных для двигателей внутреннего сгорания, можно обеспечить изменение подачи 0 насоса 3 по закону
б fc -аеад-Ъё(0+си, (6)
получив полную независимость протекающих в системе управления процессов от угловой скорости (0-вала 2 насоса 3.
Таким образом, повышение динамической точности системы обеспечивается за счет ее инвариантности по отношению к частоте вращения вала приводного двигателя.
Формула изобретения
Способ управления стабилизирующим, объемным гидроприводом синхронного генератора автономной электроустановки, заключающийся в измерении угловой скорости вала гидромотора, давлений в силовых гидролиниях гидропривода, угловой скорости вала насоса и параметра регулирования насоса и в формировании линейной функции ошибки угловой скорости гидромотора и давлений в силовых гидролиниях гидропривода, отличающий с я тем, что, с целью повышения динамической точности стабилизации ча0
5
стоты вращения вала синхронного генератора, дополнительно измеряют угловое ускорение вала насоса и скорость изменения параметра регулирования насоса, перемножают сигналы углового ускорения вала насоса и скорости изменения параметра регулирования насоса, полученный сигнал суммируют с сигналом линейной функции ошибки угловой скорости гидромотора и давлений в силовых гидролиниях гидропривода, а также сигналами параметра регулирования насоса и скорости его изменения, результат суммирования делят на сигнал угловой скорости вала насоса, результат деления суммируют с сигналами параметра регулирования насоса и скорости его изменения, а результат последнего суммирования преобразуют в ток обмотки управления управляющего электромагнита регулятора насоса, питаемого от источника тока „
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением космического аппарата вокруг центра масс | 1990 |
|
SU1819834A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Система автоматического управления процессом полимеризации дивинил-стирольного каучука | 1987 |
|
SU1531069A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Устройство для автоматического управления автономной электроэнергетической установкой | 1988 |
|
SU1721785A1 |
| Система управления станком для шлифования кулачковых валов | 1984 |
|
SU1281389A1 |
| Электропривод | 1985 |
|
SU1339859A1 |
| Широкополосный корректор | 1989 |
|
SU1688417A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Способ регулирования момента двигателя постоянного тока | 1989 |
|
SU1713068A1 |
Изобретение позволяет повысить динамическую точность стабилизации Изобретение относится к электроэнергетике и может быть использовано в приводах синхронных генераторов переменного тока автономных электроэнергетических установок с отбором мощности от приводных двигателей транспортных средств. Келью изобретения является повышение динамической точности стабилизации частоты вращения вала синхронного генератора. На чертеже показана схема системы управления стабилизирующим объемным частоты вращения вала синхронного генератора. Измеряют угловое ускорение вала насоса и скорость изменения параметра регулирования насоса, перемножают сигналы углового ускорения вала насоса и скорости изменения параметра регулирования насоса, полученный сигнал суммируют с сигналом линейной функции ошибки угловой скорости гидромотора и давлений в силовых гидролиниях гидропривода, а также с сигналами параметра регулирования насоса и скорости его изменения, результат суммирования делят на сигнал угловой скорости вала насоса, результат деления суммируют с сигналами параметра регулирования насоса и скорости его изменения, а результат последнего суммирования преобразуют в ток обмотки управления управляющего электромагнита регулятора насоса, питаемого от источника тока. 1 ил. S (Л гидроприводом синхронного генератора автономной электроустановки. Система управления содержит приводной двигатель 1, связанный валом 2 с регулируемым насосом 3, связанным силовыми гидролиниями 4 и 5 с нерегулируемым гидромотором 6, вал 7 которого связан с синхронным генератором 8, регулятор 9, связанный с регулирующим органом 10 насоса 1, ре- гyлнpveмый источник 11 тока, связанный с обмоткой 12 управления управляющего электромагнита регулятора 9, О 4 0 СО 1
| Прокофьев В.Н0, Казмиренко В.0 Проектирование и расчет автономных приводов | |||
| М,.: Машиностроение, 1978, с | |||
| Эксцентричный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию и т.п. работ | 1924 |
|
SU203A1 |
