Изобретение относится к средствам автоматизации одноковшовых экскаваторов, а именно к устройствам измерения загрузки ковша экска ватора механической лопаты, и може быть использовано для автоматическ го контроля и учета вьфаботки экск ватора и работающего с ним в комплексе транспорта а также для дози рования загрузки последнего Известно устройство для контрол производительности одноковшового экскаватораj содержащее совокупнос взаимосвязанных элементов, осущест лякнцую контроль величины загрузки ковша, а именно{/динамрметр усилий подъемных канатах, интегратор, ком пенсатор добавочного веса, измеритель положения ковша, управляемый ключ 1J . Однако -известное устройство не обладает точностью, достаточной для /чета производительности экскаватор за короткий промежуток времени, например за время погрузки одного транспортного средства-, и тем самым для учета производительности и дози рования загрузки транспорта. Это происходит по следующим причинам. Усилия в подъемном канате во время переноса и установки ковша над местом разгрузки содержат динамические составляющие, обусловленные изменениями скорости перемещающих ковш приводов и достигающие 20% от полного усилия. Причём динамические усилия являются как периодическими колебаниями, связанными с упругостью каната, так и различньп и непериодическими функциями времени, свя занными с изменениями скоростей приводов, Частота периодических составляющих находится в пределах нескольких герц, а длительность«непериодических достигает 1,5-2 с. Интегрирование сигнала динамометра в известном устройстве в течение короткого промежуткавремени (долей секунд, так как взвешивание здесь происходит в моменты начала и окончания разгрузки) может скомпенсировать только высшие гармоники периодических составляющих динамических усилий.в канате и совсем не компенсирует апериодические составляющие. Известно также устройство для измерения загрузки ковша одноков991шового экскаватора, включающее датчики положения ковша относительно стрелы, совокупность элементов, осуществляющих косвенное измерение силы натяжения подъемного каната, включающую датчики тока и угловой скорости двигателя подъема-, дифференциатор с сумматором, нульорган, управляющий имеющим два значения сопротивления резистором, а также узел вычисления веса содержимого ковша, выполненный на операционном усилителе с управляемыми дешифратором координат резисторами Tz . В данном устройстве вес содержимого ковша непрерывно вычисляется как функция координат ковша и косвенно измеренно (по току двигателя подъемной лебедки) усилия в подъемном канате. Погрешность косвенного измерения устройством усилия в канате существенно более высокая, . чем при непосредственном измерении динамометром, главным образом из-за погрешности реального дифференциатора и приближенности реализуемой в устройстве формулы, описывающей связь между током двигателя и натяжением каната. В устройстве отсутствуют также узлы, компенсирующие динамическую составляющую силы натяжения подъемного каната, вызванную колебаниями и ускоренными перемещениями ковша с рукоятью. А для вычисления веса содержимого ковща в устройстве реализуется выражение, полученное из уравнения равновесия ковша. Поэтому устройство имеет значительные динамические погрешности взвешивания. Наиболее близким к изобретению, является устройство автоматического контроля загрузки ковша, содержащее датчик силы натяжения подъемного каната, датчики выдвижения и угла наклона рукояти, подключенные к первому и второму входам вычислителя загрузки ковша, выход которого соединен с входом ключа, к управляющему ёходу которого подключен выход блока определения момента времени измерения 3J. В этом устройстве измерения осуществляются на основании той же зависимости, связывающей в статике натяжение подъемного каната с весом и координатами ковша, что используется в устройстве 2J. Однако исходная функция аппроксимирована полиномом коэффициенты которого вычисляются на основании статистической обработки результатов измерений. Значения этих коэффицие тов должны быть близкими к коэффициентам, которые можно получить аналитически, аппроксимируя исходмостъ близка к реальной, связывающей в статике усилия в подъемном канате, вес и координаты ковша. . Тем более, что коэффициенты исходной аналитической зависимости могу быть также уточнены эксперименталь но. Исследования работы экскаватора показали, что для любой пары значе ний координат ковша в вертикальной плоскости и фиксированной его загрузке значения динамической составляющей натяжения подъемного каната, а значит, и полного усилия могут быть различными. Отсюда, значения предложенного аппроксимирующего полинома для пары постоянных координат, но различных (вследствие различньрс динамических составляющих) усилиях в канате также будут различными. Следовательно, использо вание в вычислителе загрузки аппрок симирукнцего полинома компенсация динамической погрешности взвешивания ковша не обеспечивается. Частичная компенсация таким методом была бы возможна при условии., что для каждой пары координат ковша существовала бы область преимущественных значений динамических состав ляющих натяжения каната, что весьма проблематично из-за большого числа влияющих факторов, например, даже от навыков машиниста экскаватора. В соответствии с видом аппроксимирунщего полинома построена диа логовая вычислительная схема устройства. Влияние динамической составляющей натяжения йодъемного каната на результат измерения уменьшается выбором момента взвешивания узлом распознования и пропусканием управляемым ключом результата толь ко в те моменты-, когда динамическая составляющая не должна, быть большой. Недостатком известного ус:тройст ва является то, что особенности работы экскаватора таковы, что не 994 всегда можно вьщелить моменты времени (например, при малых углах поворота на выгрузку), когда динамические составляющие натяжения каната невелики: такие моменты времени могут вообще отсутствовать. Необходимых для компенсации динамических составляющих натяжения каната функциональных узлов в устройстве нет. -Влияние динамических составляющих безусловно частично с11ижается за счет правильного выбора момента взвешиванияj особенно при контроле выработки экскаватора за относительно большой промежуток времени. Однако решить проблему повышения точности взвешивания содержимого ковша экскаватора в целом путем компенсации динамической составляющей натяжения подъемного каната в каждом измерении с помощью Известного устройства нельзя. Цель изобретения - повьш1ение точности работы устройства. Поставленная цель достигается тем, что устройство для -измерения . загрузки ковша экскаватора, содержащее датчик силы натяжения подъемного каната, датчики вьщвижения и угла наклона рукояти, подключенные к первому и второму входам вычислителя загрузки ковша, выход кото-рого соединен с входом ключа, к управляющему входу которого подключен выход блока определения момента времени измерения, снабжено сумматором, вычислителем динамической составляющей силы натяжения подъемного каната, датчиками трансверсального и радиального ускорений ковша, выходы которых подключены соответственно к первому и второму входам вычислителя динамической составляющей силы натяжения подъемного каната, выход которого подключен к вычитающему входу сумматора, к суммирующему входу которого подключен выход датчика силы натяжения подъемного каната, выход сумматера подключен к третьему входу вычислителя загрузки ковша к третьему, четвертому и пятому входам вычислителя динамическрй составляющей силы натяжения подъемногр каната подключены соответственно выходы датчиков выдвижения и угла наклона рукояти и высислителя загрузки ковша.
S
Вычислитель динамической составляющей силы натяжения подъемного каната может быть выполнен в вида функционального преобразователя двух переменных, двух сумматоров и четырех множительных блоков.
Вычислитель динамической составляющей, включенный в цепь обратной связи вычислителя загрузки ковша, совместно с Датчиками трансверсальной и радиальной составляющих вектора ускорения ковша образует канал измерения динамической составляющей силы натяжения подъемного каната.Введение такого канала обеспечивает принципиальное решение задачи повышения точности взвешивания ковша, поскольку формируемый каналом сигнал является результато вычисления в дополнительном вычислительном блоке функции, моделирующей зависимость динамической составляющей натяжения каната от ускорения и координат ковша при известной его загрузке. Поскольку вес содержимого ковша не известен заранее, вычислитель динамической составляющей натяжения включен в цепь обратной связи вычислителя загрузки. Такое включение эффективно, так как скорость изменения сигналов датчиков пренебрежимо мала по сравнению с быстродействием вычислителей.
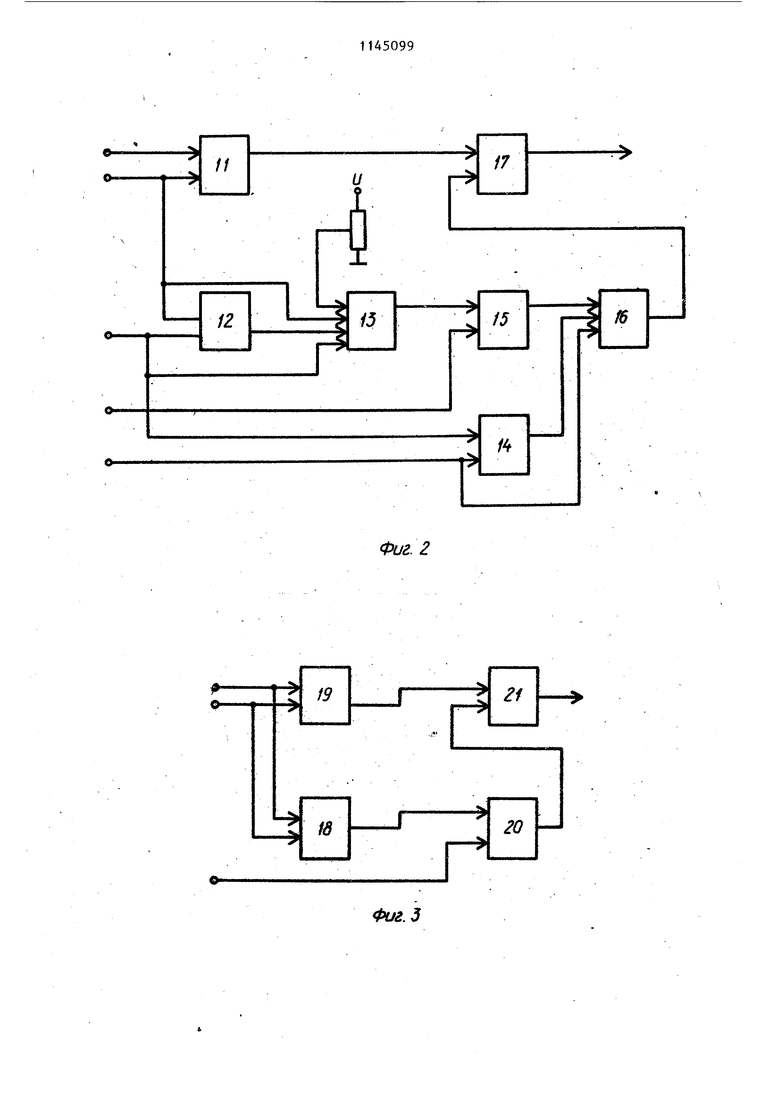
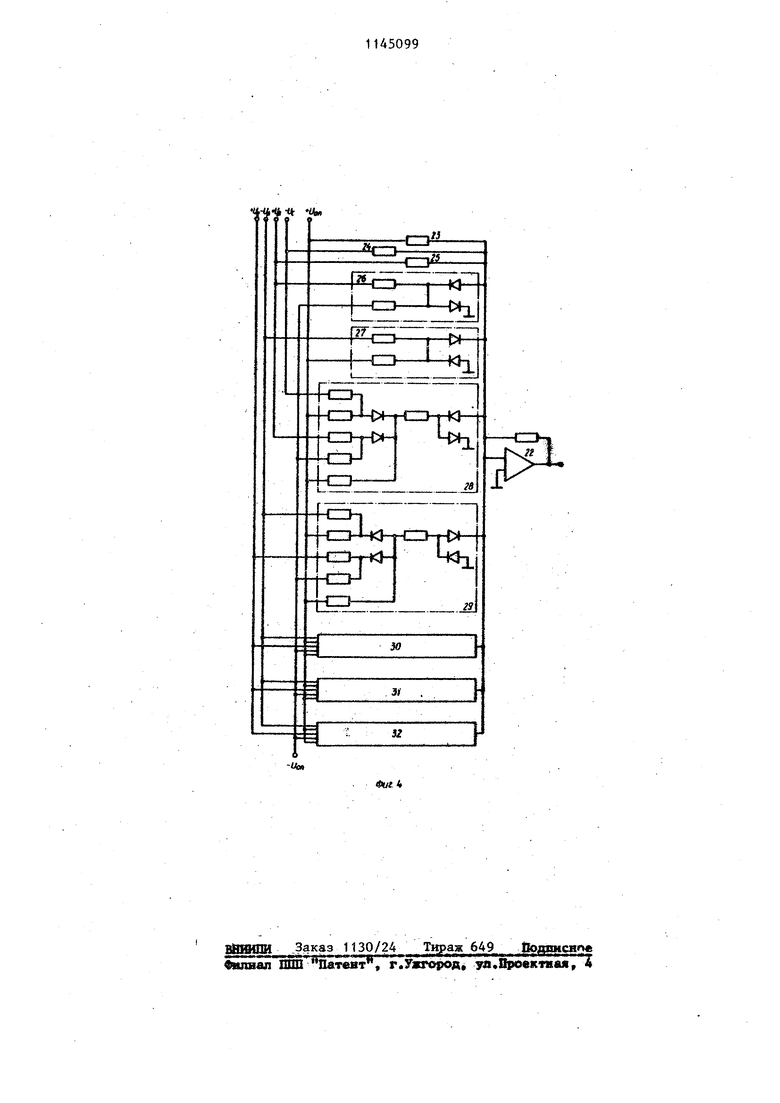
На фиг. 1 представлена структурная схема устройства для измерения загрузки ковша экскаватора на фиг, 2 и 3 структурные схемы вычислителя динамической составляющей силы натяжения подъемного каната и вычислителя загрузки ковша; на фиг. 4 - схема функционального преобразователя, воспроизводящего зависимость натяжения подъемного каната от координат порожнего ковша.
Устройство для измерения загрузки ковша содержит датчики силы натяжения подъемного каната 1, вьщвижения и угла наклона рукоятки 2 и 3, трансверсального и радиального ускорений ковша 4 и 5. Выход датчика натяжения 1 подключен к входу сумматора 6, второй вычитающий вход которого подключен к выходу вычислительного блока 7. Первый и BTOpoii входы вычислительного блока 7 подключены к выходам датчиков
450996
трансверсального и радиального ускорений ковша 4 и 5, третий и четвертый входы подключены к выходам датчиков выдвижения и угла наклона рукояти 2 и 3,.а пятый вход подключен к выходу вычислителя загрузки ковша 8 и к входу ключа 9. Первый и второй входы вычислителя загрузки ковша 8 подключены к вы ходам датчиков вьщвижения и угла наклона рукояти 2 и 3, третий вход подключен к выходу сумматора 6. Управляющий вход, ключа 9 подключен к выходу блока определения момента 15 времени измерения 10, а выход ключа является выходом устройства для измерения загрузки ков.ша.
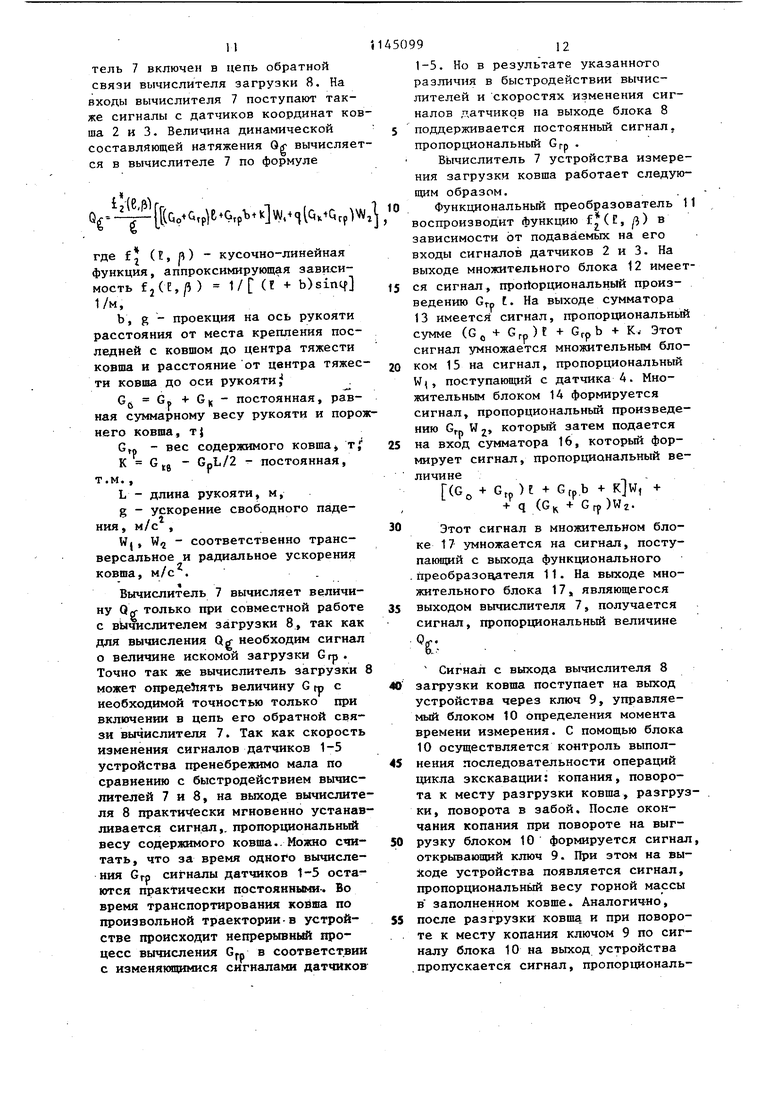
Вычислитель динамической составляющей силы натяжения подъемного каната 7, включенный в цепь обратной связи вычислителя загрузки ковша 8, содержит функциональ.ный преобразователь двух переменных 11, первый и второй входы ко торого подключены соответственно к четвёртому и третьему входам вычислителя 7, причем второй вход функционального преобразователя 11 связан также с первым входом 30 множительного блока 12 и первьм входом сумматора 13. Второй вход множительного блока 12 соединен с третьим входом сумматора 13 и первым входом множительного блока 5 14 и подключен к пятому входу вычислителя 7, первый и второй входы которого соответственно подключены к второму входу множительного блока 15 и второму входу множительного 40 блока 14. Второй вход блока 14 соединен также с третьим входом сумматора 16, первый и второй входы которого соединены соответственно с выходами множительных блоков 15 и 14-, 5 а выход соединен с вторым входом множительного блока 17. Выход множительного блока 12 соединен с вторым входом сумматора 13, четвертый вход которого подключен к источнику постоянного сигнала, а выход
соединен с первым входом множительного блока 15. Выход функционального преобразователя 11 соединен с первым входом множительного блока 5 17, выход которого является выходом вычислительного блока 7.
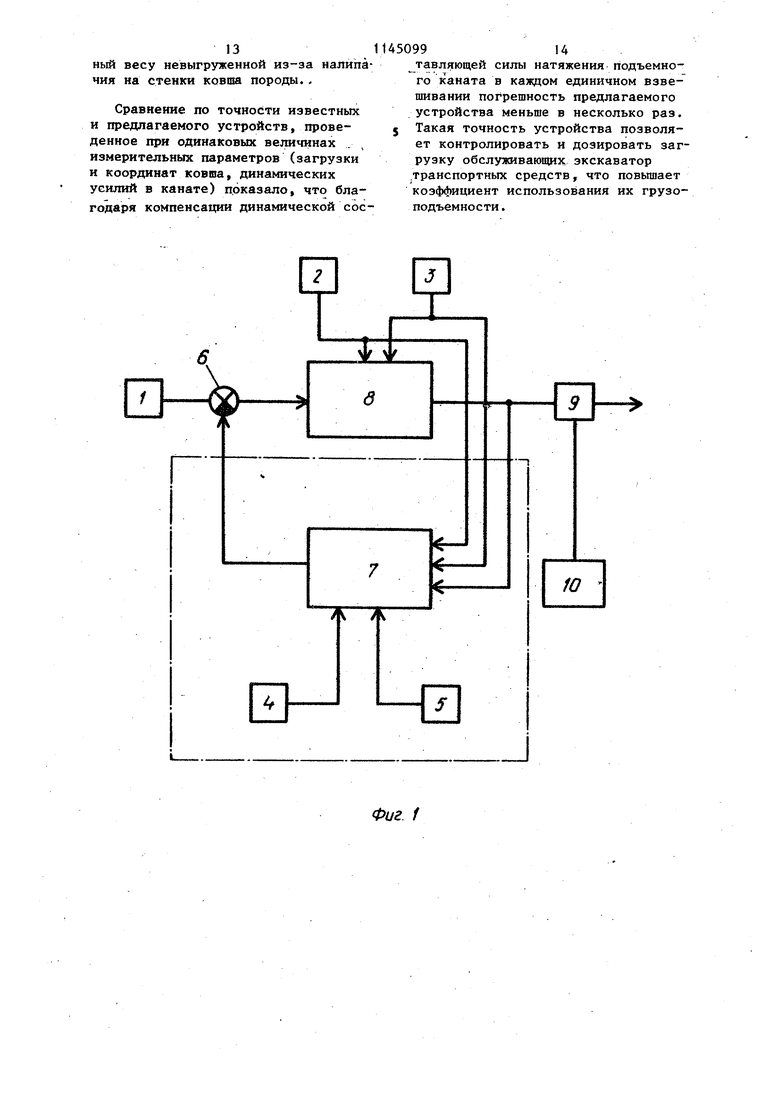
Вычислитель загрузки ковша 8 содержит два функциональных преоб7
разователя двух переменных 18 и 19. суммат,ор 20 и множительный блок 21. Первый и второй входы вычислителя загрузки 8 соединены соответственно с первыми и вторыми входами функциональных преобразователей 18 и 19, а его третий вход соединен с вторым входом сумматора 20,.первый вход которого соединен с выходом функционального преобразователя 18. Выход сумматора 20 соединен с вторым входом множительного блока 21, первый вход которого соединен с выходом функционального преобразователя 19, а выход является выходом вычислителя загрузки ковша 8.
Функциональный преобразователь 18 содержит суммирующий операционный усилитель 22, число входов которого раено числу слагаемых, представляющих элементы разложения воспроизводимой функциональным преобразователем функции, а вид каждой из входных цепей операционного усилителя определяется видом элемента разложения. Для постоянной и линейно зависимых от координат ковша 6 и ft составляющих разложения воспроизводимой функции входные цепи операционного усилителя - резисторы 23-25. Для нелинейных составляющих, являющихся функциями одной переменнойJ входные цепи операционного усилителя - резисторно-диод, ные элементы 26 и 27, а для нелинейных составляющих - функций двух переменных - резисторно-диодные элементы 28-32, причем включение диодов в элементах 29-32 одинаковое. На входы функционального преобразователя 18 подаются разнополярные сигналы tU и +Vп пропорциональные соответственно выдвижению 6 и углу наклона р рукоятки. Для задания смещений диодов в нелинейных элементах и задания постоянной составляющей воспроизводимой функции ко входам функционального преобразователя подключены опорные напряжения +М . Функциональные преобразователя 11 и 19 построены аналогично.- Вопросы построения функциональных преобразователей двух переменных подробно изложены в 4j..
Датчик силы натяжения подъемного каната 1 включает силовоспринимайде устройство, содержащее силовосприни450998
мающий блок и два симметрично расположенных с ним в одной плоскости отклоняющих блока, создающих прогиб участка подъемного каната. Под 5 силовоепринимающим блоком в опорном стакане размещен стандартный тензорезисторный бесклеевой датчик. Датчик силы.натяжения размещен на стреле экскаватора под подъемным ка 10 натом, причем канат запасован так, что огибает отклоняющие блоки снизу, а силовоспринимающий блок сверху.
Датчики вьщвижения и угла наклона рукояти 2 и 3 представляют собой линейные вращающиеся трансформаторы с подключенными к их выходам фазочувствительными выпрямителями. Вращающийся трансформатор датчика вьщ20 вижения рукояти установлен в корпусе имеющегося на экскаваторе комаидоаппарата ограничения хода рукояти, причем вал командоаппарата связан с валом вращающегося трансформатора. Датчик угла наклона рукояти установлен на седловом подщипнике экскаватора так, что оси вращающегося трансформатора и напорного вала экскаватора совпадают. Статор транс3Q форматора неподвижно зафиксирован относительно сёдлового подшипника, а ротор посредством установленной на его валу тяги зафиксирован относительно стрелы экскаватора.
35 Датчики трансверсального и радиального ускорений ковща - это стандартныеакселерометры, которые устанавливаются в защитном корпусе на задней стенке ковша с.внещней
40 стороны так, что их измерительные оси лежат в вертикальной плоскости, проходящей через стрелу и рукоять, причем измерительная ось датчика трансверсального ускорения перпендикулярна оси рукояти, а датчика радиального ускорения параллельна ей. Блок определения момента времени ; измерения 10 введен в устройстад для измерения загрузки ковша, поскольку для использования сигнала вычислителя загрузки 8 необходимо выбирать интервалы времени, когда этот сигнал соответствует измеряемой загрузке. Соответствие имеет
55 место в течение интервалов от момента окончания операции копания до начала разгрузки и при переносе / ковша к месту копания. Блок ,10 яв9 ,
ляется самостоятельным устройством, применяемым в системах автоматического контроля и учета параметров процесса экскавации и включает логическую схему и датчики (режимов работы приводов включения ступеней командоко 1троллеров приводов и т. п.) по сигналам которых логической схемой контролируется выполнение отдельных операций экскавации в заданной последовательности и формируются сигналы, обеспечивающие контроль и регистрацию параметров процесса экскавации, в том числе и разрешающие взвешивание ковша. Подобные устройства описаны, например, в pj .
Устройство для измерения загрузки ковша работает следующим образом.
При транспортировании груженого ковша к месту разгрузки или порожнего к месту копания натяжения подъемного каната зависит от координат и ускорения ковша, а также веса его содержимого. Сила натяжения каната измеряется датчиком 1, выходной сигнал которого есть сумма составляющих, пропорциональных статическому и динамическому усилиям. Этот сигнал поступает на вход сумматора 6, на второй вход которого однобременно поступает сигнал, пропорциональный динамической составляющей силы натяжения в подъемном канате и форьмруемый в вычислителе 7. В сумматоре 6 формируется сигнал, пропорциональней статическому усилию в канате, равный разности сигналов датчика -1 и вычислителя 7. Этот сигнал поступает на вход вьпшслителя загрузки ковша 8, на два других входа которого одновременно поступают сигналы с датчиков 2 и 3, измеряющих вьщвижение и угол наклона рукоятки. В вычислителе загрузки 8 формируется сигнал, пропорщюнальный весу содержимого ковша, вычисляемому по формуле
G,p fj (g, p.) Q, - Q; (I,/),
где Qj,, ( 8 fl) кусочно-линейная функция, аппроксимирукицая зависимость статического усилия в подъемном канате от координат пустого ковша J
Qjs - величина статической составляющей усилия в подъемном канате-,
Д509910
f (f, ft) - безразмерная кусочно-линейная функция координат ковгаа, аппроксимирующая зависимость
fj(P, /) sin Cj (Е, /))/cos и 5-/i).,
3i - угол наклона стрелы, обычно равный 7/4,
8 р - вьодвижение и угол наклона рукояти по отношению к стрелеJ
10 Ц - угол между подъемным канатом и осью рукояти, зависящий от 6 и /). ,
функция QQ (Е, р) воспроизводится функциональным преобразователем
15 18, а функция f,(t, /) функциональным преобразователем 19 вычислителя загрузки 8. На выходе сумматора 20 получается сигнал, пропорциональный разности статической
20 составляющей измеренного датчиком 1 усилия в подъемном канате и статического усилия, которое было бы в канате при текущих значениях координат ковша и , но при пустом
25 ковше. Сигнал, имеющийся на выходе сумматора 20, умножается в мноясительном блоке 21 на сигнал, поступающий с выхода функционального преобразователя 19, в результате чего на выходе множительного блока имеется сигнал, пропорциональный загрузке ковша G.
Величина динамической составляющей натяжения подъемного каната Qgr
jj косвенно измеряется вычислителем 7 с подключенными к его входам датчиками трансверсального и радиального ускорений ковша 4 и 5. Геометрическая сумма величин, пропорциональных сигналам датчиков 4 и 5, равна вектору ускорения ковша в вертикальной плоскости, проходящей через стрелу и рукоять. Вектор ускорения при известных координатах
5 ковша и весе его содержимого полностью определяет динамическую составляющую натяжения подъемного каната, равную сумме проекций на , ось каната сил инерции, обусловлен50 , ных изменениями скоростей приводов, перемещающих ковш в вертикальной плоскости, переносным движением ковша вместе с поворотной платформой, колебаниями ковша с рукоятью
55 вследствие упругости подъемного каната и каната стрелового полиспаста-. Поскольку вес содержимого ковша не известен заранее, вычисли11тель 7 включен в цепь обратной связи вычислителя загрузки 8, На входы вычислителя 7 поступают также сигналы с датчиков координат ко ша 2 и 3. Величина динамической составляющей натяжения Og вычисляе ся в вычислителе 7 по формуле |(i;0.«.,,lllS « w,nlQ.Ci,,l где f (Е, и) - кусочно-линейная функция, аппроксимирующая зависимость f j(E, /i ) 1/ ( + b)sintf 1 /м, b, g - проекция на ось рукояти расстояния от места крепления последней с ковшом до центра тяжести ковша и расстояние от центра тяжес ти ковша до оси рукояти G. G J, + G к - постоянная, равная суммарному весу рукояти и поро него ковша, TJ Gfp - вес содержимого ковша т} К G (g - GpL/2 - постоянная, т.м. , L - длина рукояти, м, g - ускорение свободного падения, м/с , { i i соответственно трансверсальное и радиальное ускорения ковша, м/с . Вычислитель 7 вычисляет величину Q только при совместной работе с вычислителем загрузки 8, так как для вычисления Qgr необходим сигнал о величине искомой загрузки Gm . Точно так же вычислитель загрузки может определять величину G fn с необходимой точностью только при включении в цепь его обратной связи вычислителя 7. Так как скорость изменения сигналов датчиков 1-5 устройства пренебрежимо мала по сравнению с быстродействием вычислителей 7 и 8, на выходе вычислите ля 8 практически мгновенно устанав ливается сигнал,, пропорциональный весу содержимого ковша.. Можно считать, что за время одного вычисления Grp сигналы датчиков 1-5 остаются практически постоянными-. Во время транспортирования ковша по произвольной траектории-в устройстве происходит непрерывнь процесс вычисления в соответствии с изменякяцимися сигналами датчиков 9912 1-5. Но в результате указанного различия в быстродействии вычислителей и скоростях изменения сигналов датчиков на выходе блока В поддерживается постоянный сигнал, пропорциональный Grp . Вычислитель 7 устройства измерения загрузки ковша работает следующим образом. Функциональный преобразователь 11 воспроизводит функцию f(E, ) в зависимости от подаваемых на его входы сигналов датчиков 2 и 3. На выходе множительного блока 12 имеется сигнал, проЛорциональный произведению Grp t. На выходе сумматора 13 имеется сигнал, пропорциональный сумме (GJ, + Grp) + Grpb + К. Этот сигнал умножается множительным блоком 15 на сигнал, пропорциональный W(, поступающий с датчика 4. Множительным блоком 14 формируется сигнал, пропорциональный произведению W ,, который затем подается на вход сумматора 16, которьш формирует сигнал, пропорциональный величине(G + G,p)E + Grpb + + + q (G + Grp )Wz. Этот сигнал в множительном блоке 17 умножается на сигнал, поступающий с выхода функционального преобразощдтеля 11. На выходе множительного блока 17, являющегося выходом вычислителя 7, получается сигнал, пропорциональный величине %- . . Сигнал с выхода вычислителя 8 загрузки ковша поступает на выход устройства через ключ 9, управляемый блоком 10 определения момента времени измерения. С помощью блока 10 осуществляется контроль выполнения последовательности операций цикла экскавации: копания, поворота к месту разгрузки ковша, разгрузки, поворота в забой. После окончания копания при повороте на выгрузку блоком 10 формируется сигнал, открывающий ключ 9. При этом на выходе устройства появляется сигнал, пропорциональный весу горной массы в заполненном ковше. Аналогично, после разгрузки ковша и при повороте к месту копания ключом 9 по сигналу блока 10 на выход устройства ропускается сигнал, пропорциональ13
ный весу невыгруженной из-за налипа чия на стенки ковша породы..
Сравнение по точности известных и предлагаемого устройств, проведенное при одинаковых величинах . измерительных параметров (загрузки и координат ковша, динамических усилий в канате) показало, что благодаря компенсации динамической сое
14509914
тавляющей силы натяжения подъемного каната в каждом единичном взвешивании погрешность предлагаемого устройства меньше в несколько раз. J Такая точность устройства позволяет контролировать и дозировать загрузку обслуживающих экскаватор транспортных средств, что повышает козффициент использования их грузоподъемности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля загрузки ковша экскаватора | 1978 |
|
SU866076A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ЗАГРУЗКИ КОВША ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1973 |
|
SU380800A1 |
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство непрерывного измерения загрузки ковша одноковшового экскаватора | 1976 |
|
SU594262A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Способ измерения режимной координаты и устройство для его осуществления | 1983 |
|
SU1127953A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Устройство для управления рабочим оборудованием экскаватора-драглайна | 1985 |
|
SU1313962A2 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
УСТРОЙСТВО ДЛЯ И ЖРЕНИЯ ЗАГРУЗКИ КОВША ЭКСКАВАТОРА, содержащее датчик силы натяжения подъемного каната, датчики вьщвкжения. и угла наклона рукоятки, подключенные к первому и второму входам вычислителя загрузки ковша, выход которого соединен с входом ключа, к управляющему входу которого подключен выход блока определения момента времени измерения, отличающееся тем, что, с целью повышения точности работы устройства, оно снабжено сумматором, вычислителем динамической составляющей силы натяжения подъемного каната,., датчиками трансверсального и радиального ускорений ковша, выходы которых подключены соответственно к первому и второму входам вычислителя динамическрй составляющей (Л силы натяжения подъемного каната, выход которого подключен к вычитающему входу сумматора, к суммирующему входу которого подключен выход датчика силы натяжения подъемного каната, выход сумматора подключен к третьему входу вычислител загрузки ковша, к третьему, четвертому и пятому входам вычислителя динами4; .ческой составляющей силы натяжения О1 подъемного каната подключены соото ветственно выходы датчиков вьщви;О жения и угла наклона рукоятки и вычислителя загрузки ковша.
Ж
м i
г
ю
Фиг. 1
о19
-
Фиг. 2
г
20
Фиг.З
