Изобретение относится к способам автоматического управления рукавными фильтрами и может быть использовано при улавливании пыли в деревообрабатывающей и других отраслях промышленности.
Цель изобретения - повышение эффективности регенерации фильтра и надежности его эксплуатации.
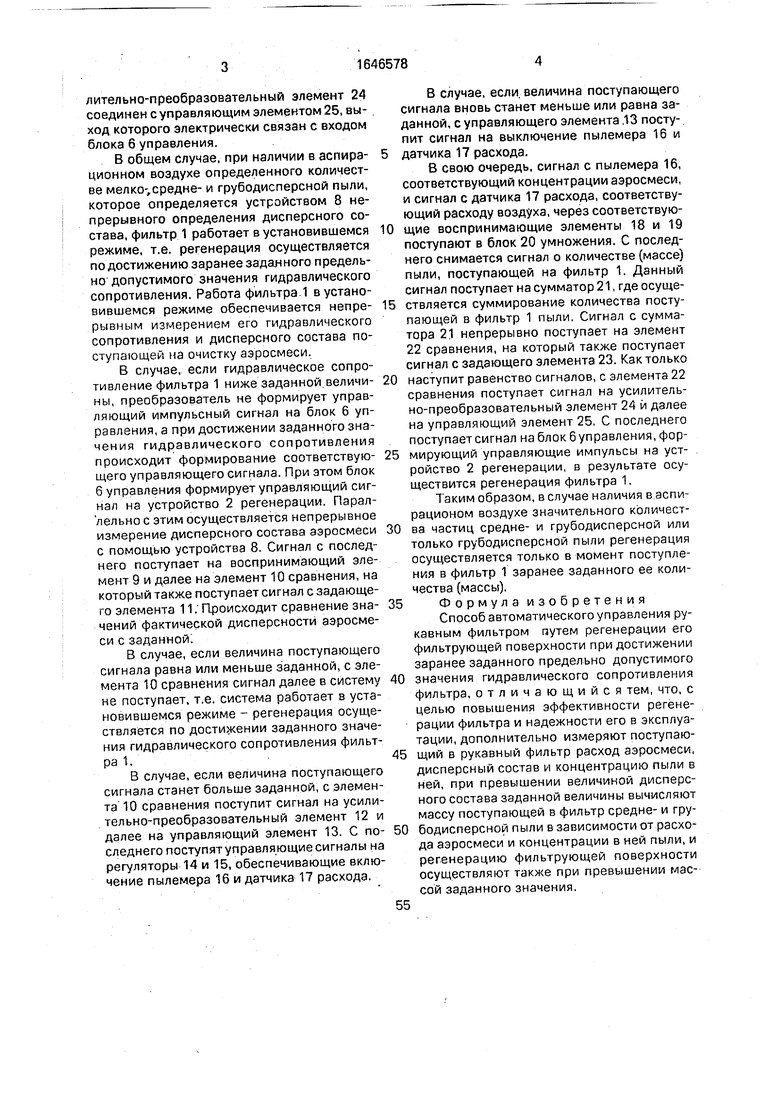
На чертеже представлена принципиальная схема системы автоматического управления рукавным фильтром, реализующей предложенный способ.
Способ осуществляется следующим образом.
В рукавный фильтр 1 поступает воздух, содержащий мелко-,средне- и грубодиспер- сную пыль. При загрязнении фильтра 1 устройство 2 регенерации по сигналу, формируемому приемниками 3 давления, диф- манометром 4, преобразователем 5 и
блоком 6 управления, осуществляет регенерацию рукавов фильтра 1. На подводящем трубопроводе 7 установлено устройство 8 непрерывного определения дисперсного состава аэросмеси, соединенное через воспринимающий элемент 9, элемент 10 сравнения, который также соединен с задающим элементом 11, и усилительно-преобразовательный элемент 12 суправляющим элементом 13. Выходы управляющего элемента 13 электрически связаны соответственно с регуляторами 14 и 15пылемера 16 и датчика 17 расхода, установленных на подводящем трубопроводе 7.
Пылемер 16 и датчик 17 расхода соединяются через соответствующие воспринимающие элементы 18 и 19 с блоком 20 умножения, выход которого через сумматор 21, элемент 22 сравнения, который также соединен с задающим элементом 23, и усиО
о ел XI оа
лительно-преобразовательный элемент 24 соединен с управляющим элементом 25, выход которого электрически связан с входом блока 6 управления.
В общем случае, при наличии в аспира- ционном воздухе определенного количестве мелко-,средне- и грубодисперсной пыли, которое определяется устройством 8 непрерывного определения дисперсного состава, фильтр 1 работает в установившемся режиме, т.е. регенерация осуществляется по достижению заранее заданного предельно допустимого значения гидравлического сопротивления. Работа фильтра 1 в установившемся режиме обеспечивается непрерывным измерением его гидравлического сопротивления и дисперсного состава поступающей на очистку аэросмеси.
В случае, если гидравлическое сопротивление фильтра 1 ниже заданной величины, преобразователь не формирует управляющий импульсный сигнал на блок 6 управления, а при достижении заданного значения гидравлического сопротивления происходит формирование соответствующего управляющего сигнала. При этом блок 6 управления формирует управляющий сигнал на устройство 2 регенерации. Параллельно с этим осуществляется непрерывное измерение дисперсного состава аэросмеси с помощью устройства 8. Сигнал с последнего поступает на воспринимающий элемент 9 и далее на элемент 10 сравнения, на который также поступает сигнал с задающего элемента 11. Происходит сравнение значений фактической дисперсности аэросмеси с заданной.
В случае, если величина поступающего сигнала равна или меньше заданной, с элемента 10 сравнения сигнал далее в систему не поступает, т.е. система работает в установившемся режиме - регенерация осуществляется по достижении заданного значения гидравлического сопротивления фильтра 1.
В случае, если величина поступающего сигнала станет больше заданной, с элемента 10 сравнения поступит сигнал на усилительно-преобразовательный элемент 12 и далее на управляющий элемент 13. С последнего поступят управляющие сигналы на регуляторы 14 и 15, обеспечивающие включение пылемера 16 и датчика 17 расхода.
В случае, если величина поступающего сигнала вновь станет меньше или равна заданной, с управляющего элемента .13 поступит сигнал на выключение пылемера 16 и
датчика 17 расхода.
В свою очередь, сигнал с пылемера 16, соответствующий концентрации аэросмеси, и сигнал с датчика 17 расхода, соответствующий расходу воздуха, через соответствующие воспринимающие элементы 18 и 19 поступают в блок 20 умножения. С последнего снимается сигнал о количестве (массе) пыли, поступающей на фильтр 1. Данный сигнал поступает на сумматор 21, где осуществляется суммирование количества поступающей в фильтр 1 пыли, Сигнал с сумматора 21 непрерывно поступает на элемент 22 сравнения, на который также поступает сигнал с задающего элемента 23. Как только
наступит равенство сигналов, с элемента 22 сравнения поступает сигнал на усилительно-преобразовательный элемент 24 и далее на управляющий элемент 25. С последнего поступает сигнал на блок 6 управления, формирующий управляющие импульсы на устройство 2 регенерации, в результате осуществится регенерация фильтра 1.
1 аким образом, в случае наличия в аспи- рационом воздухе значительного количества частиц средне- и грубодисперсной или только грубодисперсной пыли регенерация осуществляется только в момент поступления в фильтр 1 заранее заданного ее количества (массы),
Формула изобретения
Способ автоматического управления рукавным фильтром путем регенерации его фильтрующей поверхности при достижении заранее заданного предельно допустимого
значения гидравлического сопротивления фильтра, отличающийся тем, что, с целью повышения эффективности регенерации фильтра и надежности его в эксплуатации, дополнительно измеряют поступающий в рукавный фильтр расход аэросмеси, дисперсный состав и концентрацию пыли в ней, при превышении величиной дисперсного состава заданной величины вычисляют массу поступающей в фильтр средне- и грубодисперсной пыли в зависимости от расхода аэросмеси и концентрации в ней пыли, и регенерацию фильтрующей поверхности осуществляют также при превышении массой заданного значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентиляционная всасывающая установка для транспортирования сыпучих материалов | 1988 |
|
SU1537628A1 |
| Установка для пневматического транспортирования сыпучего материала | 1988 |
|
SU1527108A2 |
| Система автоматического управления многосекционным рукавным фильтром | 1990 |
|
SU1775134A1 |
| Устройство для автоматического управления рукавным фильтром | 1977 |
|
SU637129A1 |
| Способ очистки высокотемпературных аэрозолей | 2017 |
|
RU2674967C1 |
| СПОСОБ УПРАВЛЕНИЯ РУКАВНЫМ ФИЛЬТРОМ | 2004 |
|
RU2256489C1 |
| УСТАНОВКА ПЫЛЕУЛАВЛИВАЮЩАЯ С ЖАЛЮЗИЙНЫМ ЦИКЛОНОМ | 2008 |
|
RU2397824C1 |
| УСТРОЙСТВО ПЫЛЕУЛАВЛИВАНИЯ | 2006 |
|
RU2308318C1 |
| ДВУХСТУПЕНЧАТАЯ СИСТЕМА ПЫЛЕУДАЛЕНИЯ КОЧЕТОВА | 2011 |
|
RU2458745C1 |
| ПЫЛЕУЛАВЛИВАЮЩАЯ СИСТЕМА КОЧЕТОВА | 2008 |
|
RU2407596C2 |

Изобретение относится к способам автоматического управления рукавными фильтрами. Применение способа позволяет повысить эффективность регенерации рукавного фильтра и надежность его эксплуатации. Способ автоматического управления предусматривает регенерацию фильтрующей поверхности рукавного фильтра при достижении его гидравлическим сопротивлением предельно допустимого значения, а также осуществление дополнительной регенерации фильтрующей поверхности при поступлении в фильтр заданного количества средне- и грубодисперсной пыли. 1 ил.
| Система автоматического управления многосекционным рукавным фильтром | 1983 |
|
SU1152623A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Мазус М.Г., и др | |||
| Фильтры для улавливания промышленных пылей | |||
| М.: Машиностроение, 1985, с.18 - 19 | |||
| Шхатов Е.Ф | |||
| Автоматизация промышленной и санитарной очистки газов в химической промышленности | |||
| М.: Химия, 1981, с.177-179. | |||
