Фи&1
реводят в импульсный режим при помощи обмоток 7. При этом изделия 15 в пакете раздвигаются. Через штуцер 12 подается избыточное давление в полость 13, которое способствует удалению вертикальных
прокладок между изделиями. Производят транспортировку и разгрузку. Причем отделение изделий 15 от захвата может быть как поштучное, так и всего пакета. 2 з.п. ф-лы, 4 ил,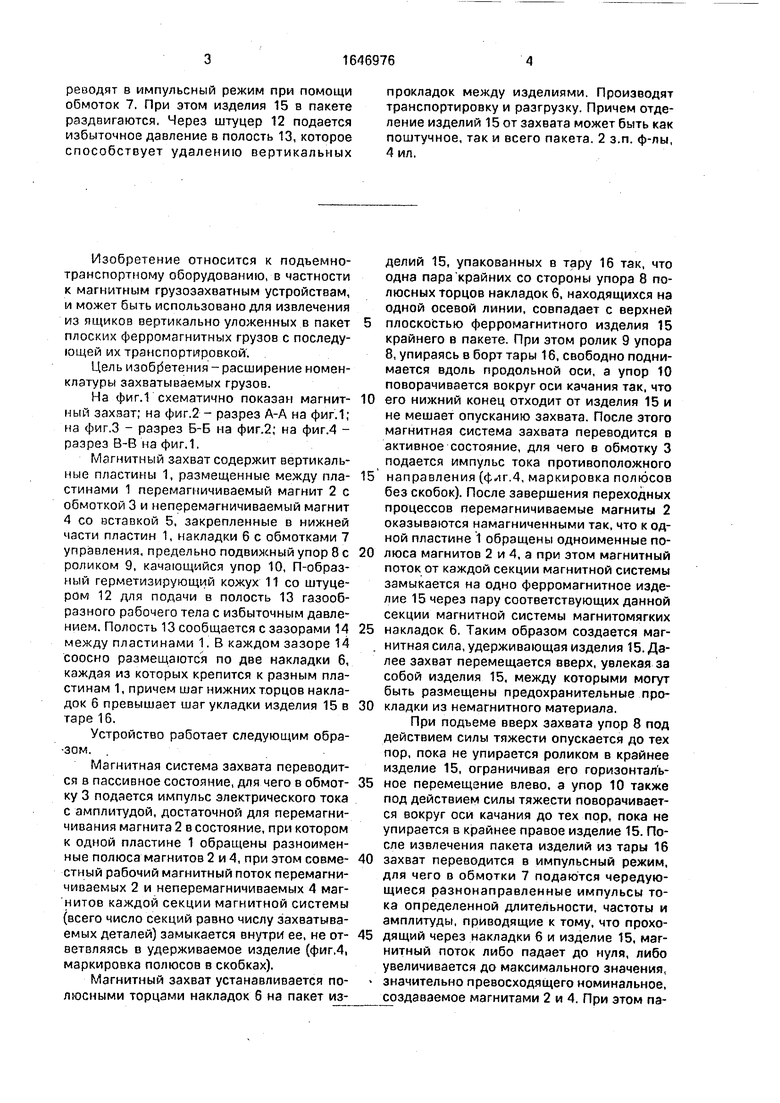

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный захват | 1988 |
|
SU1585271A2 |
| Магнитный захват | 1988 |
|
SU1636317A2 |
| Магнитный захват | 1982 |
|
SU1068366A1 |
| Магнитный захват | 1985 |
|
SU1253932A1 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Устройство для закрепления ферромагнитных деталей | 1989 |
|
SU1713773A1 |
| Способ управления грузовым электромагнитом в режиме освобождения от ферромагнитного груза | 1987 |
|
SU1585230A1 |
| Магнитная плита | 1989 |
|
SU1808611A1 |
| Магнитное устройство для закрепления деталей | 1990 |
|
SU1798105A1 |
| Грузоподъемное магнитное устройство | 1982 |
|
SU1096186A1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности к нажимным грузозахватным устройствам. Цель изобретения - расширение номенклатуры захватываемых грузов. Магнитный захват содержит пластины 1, перемагничи- ваемые магниты 2 с обмотками 3, непере- магничиваемые магниты 4, накладки 6 с обмотками 7, П-образный герметизирующий кожух 11. При пассивном состоянии магнитной системы магнитный поток замыкается пластинами 1 внутри захвата. При активном состоянии поток замыкается изделием 15. Пассивное и активное состояния достигаются при помощи обмоток 3. При пассивном состоянии системы захват подводится к пакету изделий 15. Магнитная система переводится в активное состояние. Захват с изделиями 15 приподнимают и пе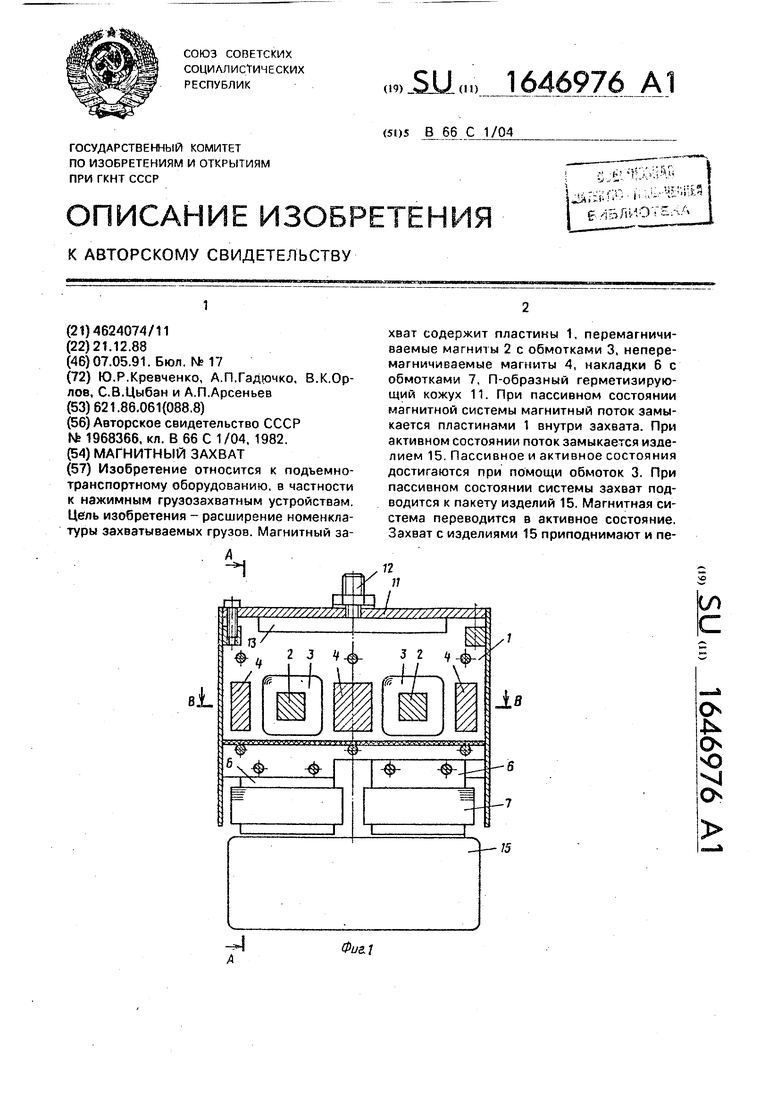
Изобретение относится к подъемно- транспортному оборудованию, в частности к магнитным грузозахватным устройствам, и может быть использовано для извлечения из ящиков вертикально уложенных в пакет плоских ферромагнитных грузов с последующей их транспортировкой .
Цель изобретения - расширение номенклатуры захватываемых грузов.
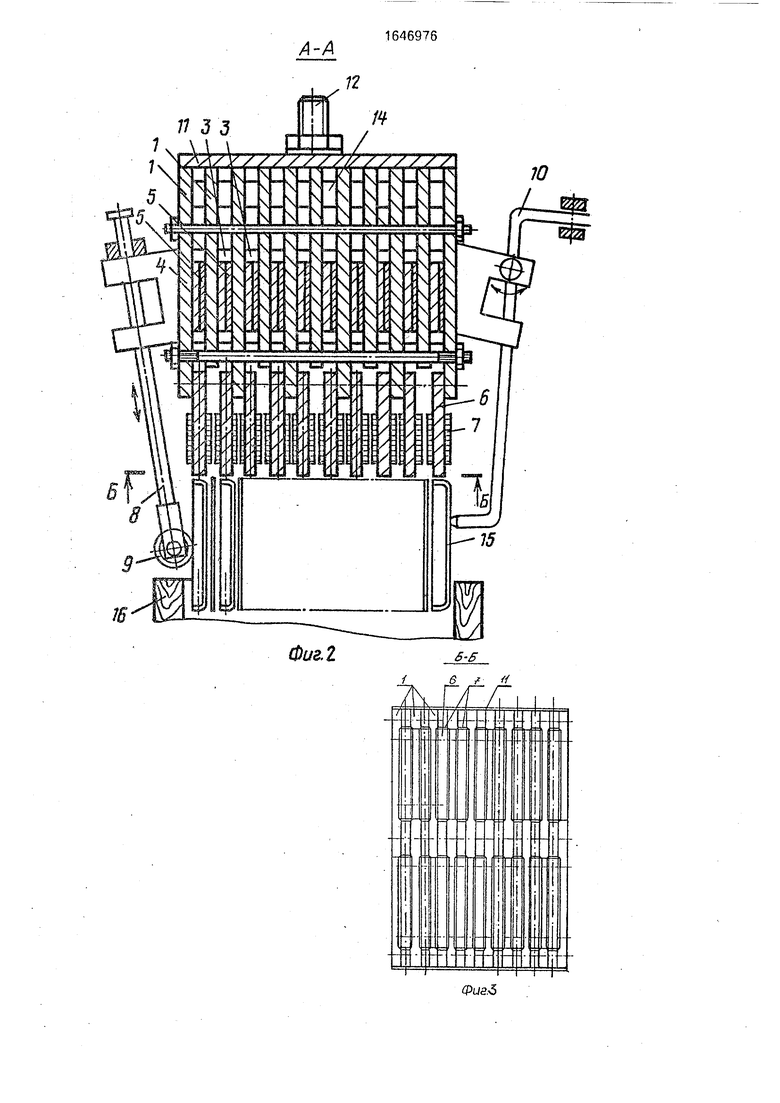
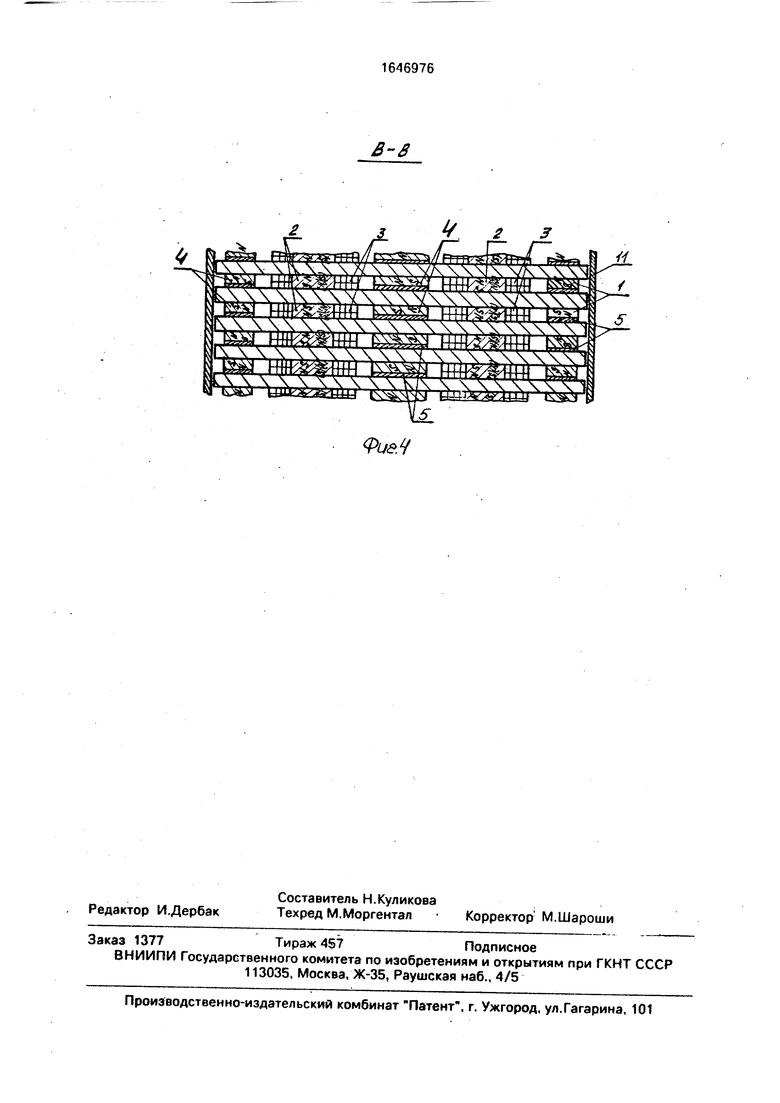
На фиг.1 схематично показан магнитный захват; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.1.
Магнитный захват содержит вертикальные пластины 1, размещенные между пластинами 1 перемагничиваемый магнит 2 с обмоткой 3 и неперемагничиваемый магнит 4 со вставкой 5, закрепленные в нижней части пластин 1, накладки 6 с обмотками 7 управления, предельно подвижный упор 8 с роликом 9, качающийся упор 10, П-образ- ный герметизирующий кожух 11 со штуцером 12 для подачи в полость 13 газообразного рабочего тела с избыточным давлением. Полость 13 сообщается с зазорами 14 между пластинами 1. В каждом зазоре 14 соосно размещаются по две накладки 6, каждая из которых крепится к разным пластинам 1, причем шаг нижних торцов накладок 6 превышает шаг укладки изделия 15 в таре 16.
Устройство работает следующим обра- зом.
Магнитная система захвата переводится в пассивное состояние, для чего в обмотку 3 подается импульс электрического тока с амплитудой, достаточной для перемагни- чивания магнита 2 в состояние, при котором к одной пластине 1 обращены разноименные полюса магнитов 2 и 4, при этом совместный рабочий магнитный поток перемагни- чиваемых 2 и неперемагничиваемых 4 магнитов каждой секции магнитной системы (всего число секций равно числу захватываемых деталей) замыкается внутри ее, не ответвляясь в удерживаемое изделие (фиг.4, маркировка полюсов в скобках).
Магнитный захват устанавливается полюсными торцами накладок б на пакет изделий 15, упакованных в тару 16 так, что одна пара крайних со стороны упора 8 полюсных торцов накладок 6, находящихся на одной осевой линии, совпадает с верхней
плоскостью ферромагнитного изделия 15 крайнего в пакете. При этом ролик 9 упора 8, упираясь в борт тары 16, свободно поднимается вдоль продольной оси, а упор 10 поворачивается вокруг оси качания так, что
его нижний конец отходит от изделия 15 и не мешает опусканию захвата. После этого магнитная система захвата переводится в активное состояние, для чего в обмотку 3 подается импульс тока противоположного
направления (фиг.4, маркировка полюсов без скобок). После завершения переходных процессов перемагничиваемые магниты 2 оказываются намагниченными так, что к одной пластине 1 обращены одноименные полюса магнитов 2 и 4, а при этом магнитный поток от каждой секции магнитной системы замыкается на одно ферромагнитное изделие 15 через пару соответствующих данной секции магнитной системы магнитомягких
накладок 6. Таким образом создается магнитная сила, удерживающая изделия 15. Далее захват перемещается вверх, увлекая за собой изделия 15, между которыми могут быть размещены предохранительные прокладки из немагнитного материала.
При подъеме вверх захвата упор 8 под действием силы тяжести опускается до тех пор, пока не упирается роликом в крайнее изделие 15, ограничивая его горизонтал ьное перемещение влево, а упор 10 также под действием силы тяжести поворачивается вокруг оси качания до тех пор, пока не упирается в крайнее правое изделие 15. После извлечения пакета изделий из тары 16
захват переводится в импульсный режим, для чего в обмотки 7 подаются чередующиеся разнонаправленные импульсы тока определенной длительности, частоты и амплитуды, приводящие к тому, что проходящий через накладки 6 и изделие 15, магнитный поток либо падает до нуля, либо увеличивается до максимального значения, значительно превосходящего номинальное, создаваемое магнитами 2 и 4. При этом пакет изделий 15 совершает колебательные возвратно-поступательные перемещения малой амплитуды в вертикальной плоскости. При этом также происходит и перемещение изделий 15 в горизонтальном направлении, так как расстояние между вертикальными осями накладок 6 больше шага укладки изделий 15 в таре 16, т.е. происходит разьединение изделий 15 на захвате, за счет чего между их вертикальными плоскостями образуются зазоры. В зазоры между изделиями15 через штуцер 12, полость 13 и зазоры 14 подается газообразное рабочее тело с избыточным давлением.
Таким образом, за счет колебательных и горизонтальных перемещений изделий и за счет создания избыточного давления в зазорах между ними происходит удаление прокладок, после чего работа захвата в импульсном режиме прекращается и производится транспортировка изделий 15 в соответствии с циклом работы. Для разгрузки захвата магнитная его система переводится в пассивное состояние, причем может осуществляться и поштучное отделение изделий за счет последовательности перевода в пассивное состояние отдельных секций магнитной системы захвата.
Формула изобретения
дополнительной обмоткой управления, полюсные торцы которого примыкают к боковым поверхностям пластин, и одним дополнительным неперемагничиваемым магнитом с закрепленной на его полюсном торце
дополнительной вставкой из магнитомягкого материала, размещенными на расстоянии друг от друга в каждом зазоре между пластинами, двумя накладками из магнитомягкого материала с обмотками управления,
первая из которых прикреплена к первой пластине, а вторая накладка прикреплена к последующей пластине, при этом нижние торцы каждых, размещенных в одном зазоре накладок, продольно соосны, а нижние
торцы всех накладок лежат в одной плоскости ниже плоскости нижних торцов пласт мн.
работе, он снабжен закрепленными на наружных поверхностях крайних пластин упорами, первый из которых закреплен с возможностью ограниченного поворота относительно горизонтальной, параллельной
боковой плоскости пластины оси, а второй упор выполнен с роликом на нижнем конце и закреплен на пластине под острым углом к ней и с возможностью ограниченного осевого перемещения.
образованием сообщающейся с зазорами полости П-образным герметизирующим кожухом со штуцером на его крышке для подвода в полость газообразного рабочего тела с избыточным давлением.
9/.69WI
V-V
Фие.Ч
| Авторское свидетельство СССР ivfe 1968366, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
