Изобретение относится к магнитным грузозахватным устройствам и может быть использовано для управления магнитныьи захватами с постоянными магнитами, предназначенными для захватывания и удержания (при транспортировке, сборке и т.п.) ферромагнитных грузов ихги контейнеров.
Цель изобретения - повьшение эффективности работы путем ликвидации остаточного магнитного потока.
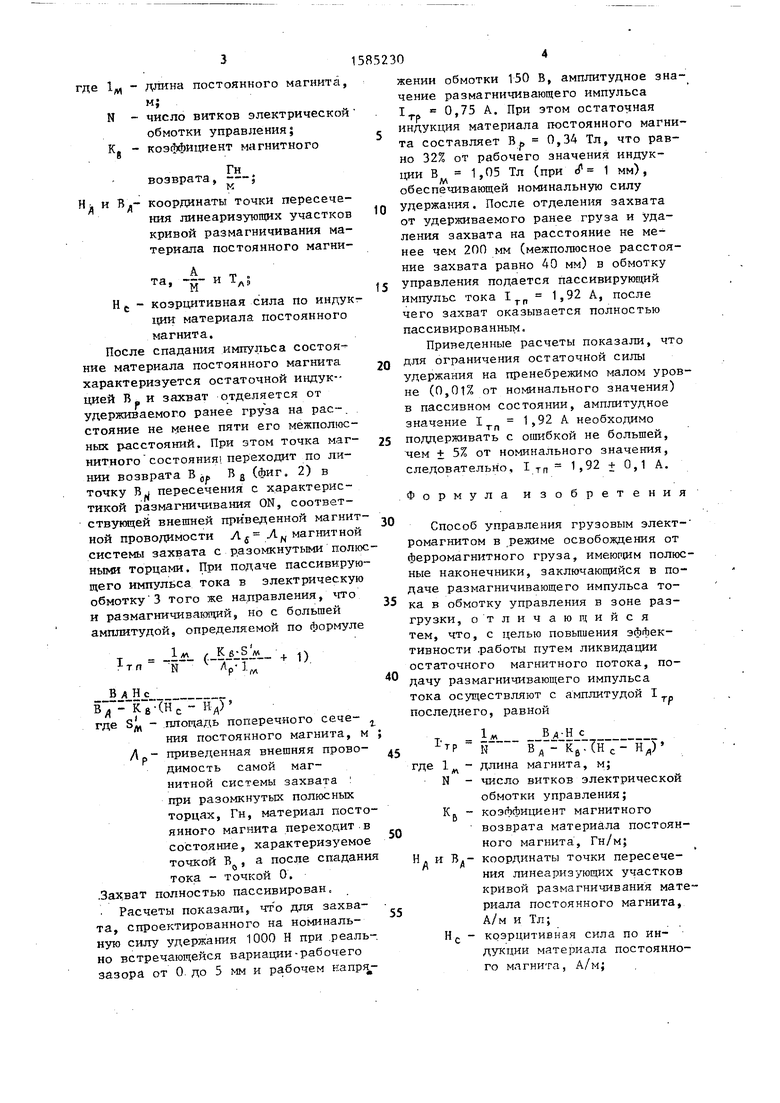
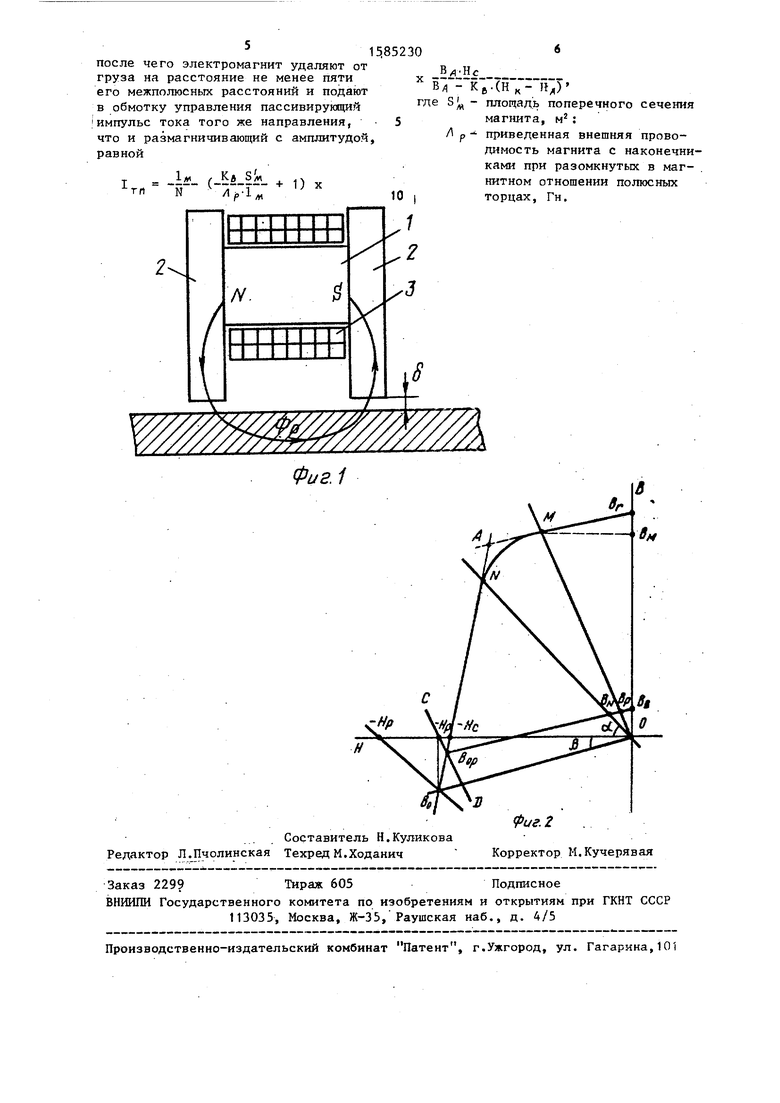
ЕЯ фиг. 1 схематически изображено расположение магнитного потока двухполюсного магнита; на фиг. 2 - диаграмма магнитного состояния материала постоянного магнита;
Двухполюсный магнит содержит постоянный магнит 1, магнитомягкие полюсные пластины 2 и размещенную на постоянном магните 1 электрическую обмотку 3 управления.
сл
с
Предложенный способ осуществляется следующим образом.
Захватывание груза осуществляется щ тем намагничивания постоянного магнита I импульсом намагничивающего тока, подаваемого в обмотку 3. При этом постоянньй магнит 1 намагничивается так, как обозначено на фиг. 1 буквами N и S. Создаваемый рабочий поток pa.s обеспечивающий номинальную, силу удержания 1 руза, замыкается по пути: полюсные пластины 2 - рабочий зазор сГ- груз. Для перевода захвата в пассивное состояние по предложенномх способу в обмотку 3 подается размагничивающий
D1
30
сл
ю
00
импульс тока амплитудой I ределяемьш по формуле
тр
1
N в, - Ка-(н с- Hj
15R5230
1д, - длина постоянного магнита,
м; N - число витков электрической
обмотки управления; К, - коэффидаент магнитного
8
Гн
возврата, --,
и В.- координаты точки пересече- ния линеаризующих участков кривой размагничивания материала постоянного магниm а ...
м
И Т
л
Н с - коэрцитивная сила по индукции материала постоянного магнита.
После спадания импульса состояние материала постоянного магнита характеризуется остаточной индукцией В и захват отделяется от удерживаемого ранее груза на рас-. стояние не менее пяти его межполгас- ных расстояний. При зтом точка маг- нитного СОСТОЯНИЯ переходит по линии возврата В ;, Bg (фиг. 2) в точку В пересечения с характеристикой размагничивания ON, соответствующей внешней приведенной магнит- ной проводимости Л 4 Л;, магнитной системы захвата с разомкнутыми полюсными торцами. При подаче пассивирующего импульса тока в электрическую обмотку 3 того же направления, гго и размагничивающий, но с большей амплитудой, определяемой по фop lyлe
-т п
1м / Kj,S м
N Лр-1
1)
В А Н с
Вд Гв(Нс- Нд)
О «-ггт чгтт Ff т. Т
где
ч - М
Арплощадь поперечного сечения постоянного магнита, м приведенная внешняя проводимость самой магнитной системы захвата : при разомкнутых полюсных торцах, Гн, материал постоянного магнита переходит.в состояние, характеризуемое точкой В, а после спадани тока - точкой 0.
.Захват полностью пассивирован. . . Расчеты показали, чт о для захвата спроектированного на номиналь- ну силу удержания 1000 Н при реально встречающейся вариации-рабочего зазора от 0. до 5 мм и рабочем напря,10
15
20 25 .JQ
женин обмотки 150 В, амплитудное значение размагничивающего импульса I 0,75 А. При этом остаточная индукция материала постоянного магнита составляет Вр 0,34 Тл, что равно 32% от рабочего значения индукции В 1,05 Тл (при f 1 мм), обеспечивающей номинальную силу удержания. После отделения захвата от удерживаемого ранее груза и удаления захвата на расстояние не менее чем 200 мм (межполюсное расстояние захвата равно 40 мм) в обмотку управления подается пассивирующий импульс тока 1 1,92 А, после чего захват оказывается полностью пассивированным.
Приведенные расчеты показали, что для ограничения остаточной силы удержания на пренебрежимо малом уровне (0,01% от номинального значения) в пассивном состоянии, амплитудное
значение 1 А необходимо поддерживать с ошибкой не большей, чем + 5% от номинального значения,
- f я t
следовательно, i тп Формула изо
1,92 + 0,1 А. б р е т е н и
Способ управления грузовым элект- ромагнитом в режиме освобождения от ферромагнитного груза, имеюп1им полюсные наконечники, заключающимися в подаче размагничивающего импульса тока в обмотку управления в зоне разгрузки, отличаю рдийся тем, что, с целью повышения эффективности .работы путем ликвидации остаточного магнитного потока, подачу размагничивающего импульса тока осуществляют с амплитудой I последнего, равной
гр
Вл-Н
5
где
LTP N N
ВлК,.(Нс- Н)
К. 0
5
длина магнита, м; число витков электрической обмотки управления; коэффициент магнитного возврата материала постоянного магнита, Гн/м; и В.- координаты точки пересечения линеаризующих участков кривой размагничивания материала постоянного магнита, А/м и Тл;
Н J, - коэрцитивная сила по ин- дукции материала постоянного магнита, А/м;
i/s.-f
Составитель Н.Куликова Редактор Л.Пчолинская Техред М.Ходанич
иг. 2 .
Корректор М.Кучерявая
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный захват | 1988 |
|
SU1585271A2 |
| Магнитный захват | 1988 |
|
SU1636317A2 |
| Магнитоэлектрический захват груза | 2022 |
|
RU2797934C1 |
| Грузоподъемное магнитное устройство | 1978 |
|
SU735547A1 |
| Магнитный захват | 1982 |
|
SU1068366A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2023 |
|
RU2827139C1 |
| Магнитный захват | 1988 |
|
SU1646976A1 |
| СПОСОБ РАЗМАГНИЧИВАНИЯ РЕЛЬСОВОГО ИЗОЛИРУЮЩЕГО СТЫКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2511738C2 |
| СПОСОБ ДУГОВОЙ СВАРКИ НАМАГНИЧЕННЫХ ОБЪЕКТОВ ПРИ РЕМОНТНО-ВОССТАНОВИТЕЛЬНЫХ РАБОТАХ | 2007 |
|
RU2344909C2 |
| СПОСОБ РАЗМАГНИЧИВАНИЯ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ ИЗ МАГНИТОМЯГКИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2335819C2 |
Изобретение относится к магнитным грузозахватным устройствам. Цель - повышение надежности и производительности работы захвата. Для перевода захвата в пассивное состояние, в котором его рабочий поток должен быть практически равен нулю, после подачи в электрическую обмотку управления размагничивающего импульса тока амплитудой I MP, рассчитанной по формуле, приведенной в описании изобретения, захват отделяют от удерживаемого ранее ферромагнитного груза на расстояние не менее пяти его межполюсных расстояний, после чего в электрическую обмотку управления подают пассивирующий импульс тока того же направления, что и размагничивающий импульс, но большей амплитуды. 2 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
