Изобретение относится к области автоматизации технологических процессов, например в сельском хозяйстве, и может быть использовано в системах управления перемещением сельскохозяйственных работ и вспомогательного оборудования.
Цель изобретения - расширение функциональных возможностей за счет допол- нительного определения направления перемещения объекта, а также увеличения рабочей зоны, и снижение требований к точности позиционирования путем исключения влияния нерабочих смещений объекта.
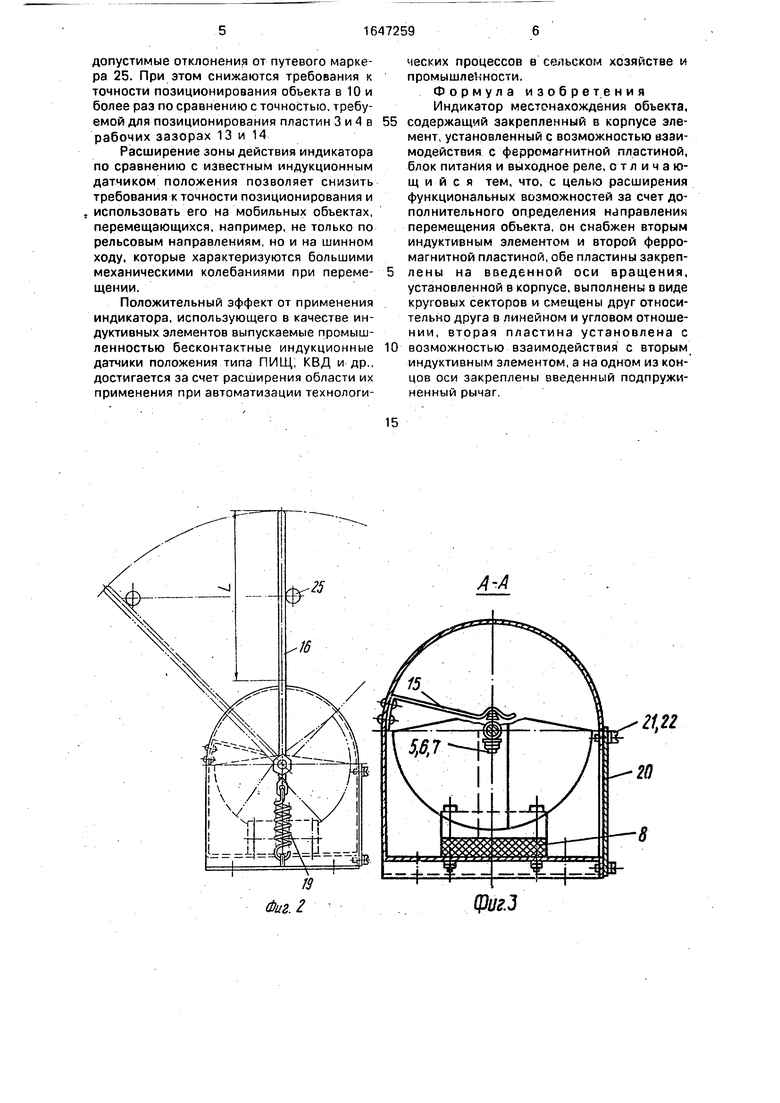
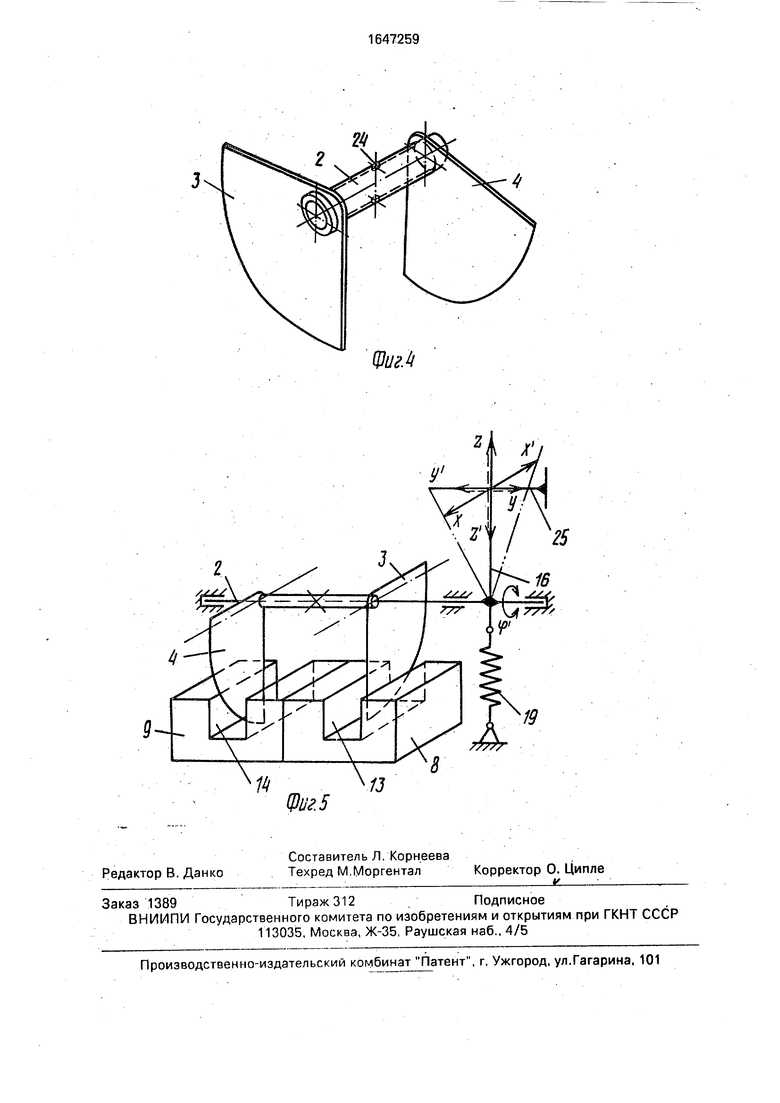
На фиг. 1 и 2 показан датчик; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - изометрическое изображение блока ферромагнитных пластин; на фиг. 5 - схематическое изображение датчика.
Индикатор содержит корпус 1 с взаимно параллельными стенками, в который установлена с возможностью вращения ось 2 с закрепленным на ней блоком ферромагнитных пластин 3 и 4, зафиксированным от возможности поворота вокруг оси 2 винтом с полукруглой головкой 5, шайбой 6 и гайками 7. На основании корпуса 1 установлены индуктивные элементы 8 и 9, неподвижно закрепленные на основании при помощи винта 10, пружинной шайбы 11 и гайки 12. Пластины 3 и 4 свободно входят (выходят) в зазоры 13 и 14 чувствительных элементов 8 и 9.
Внутри корпуса 1 установлен пружинный пластинчатый фиксатор-успокоитель 15 в нулевом положении (возможен - шариковый магнитный), который взаимодействует с полукруглой головкой винта 5. Снаружи корпуса 1 на оси 2 установлен рабочий рычаг 16, зафиксированный относительно оси гайками 17 и шайбой 18. Нижний конец рычага 16 соединен спиральной пружиной 19 с основанием корпуса 1. Пружина 19 предназначена для возврата рычага 6 в исходное положение (нулевое). Внутренняя полость корпуса 1 закрывается крышкой 20 с помощью винтов 21 и пружинных шайб 22. Ферромагнитные пластины 3 и 4 установлены на трубчатой оси 23 (фиг. 4), в которой имеются отверстия 24 для фиксации блока
пластин 3 и 4 на оси 2. Рабочий рычаг 16 взаимодействует с пассивным путевым маркером 25, который устанавливается на трассе движения объекта с датчиком.
Индикатор работает следующим образом.
Входом индикатора является рабочий рычаг 16, который определяет положение ферромагнитных пластин 3 и 4 в рабочих
зазорах 13 и 14. В исходном (нулевом) положении ферромагнитные пластины 3 и 4 введены в рабочие зазоры индуктивных элементов 8 и 9, которые при этом вырабатывают дискретные электрические сигналы.
Управление работой датчика производится путем поворота рабочего рычага 16 при механическом контакте с путевым маркером 25. Двухнаправленность датчика достигается тем, что в зависимости от направления
перемещения объекта относительно путевого маркера 25 рабочий рычаг 16 отклоняется в ту или иную сторону и выводит из рабочего зазора пластину 3 либо 4. Это приводит к снятию электрического сигнала с выхода индуктивного элемента 8 и 9 соответственно и позволяет определить момент контакта и направление движения объекта относительно путевого маркера.
Возможна и другая начальная установка ферромагнитных пластин 3 и 4, при которой в нулевом положении последние выведены из рабочих зазоров 13 и 14 и индуктивные элементы 8 и 9 не вырабатывают дискретных электрических сигналов.
Включение того или иного индуктивного элемента производится при отключении рабочего рычага 16 от нулевого положения.
После взаимодействия с путевым
маркером рабочий рычаг 16 под действием спиральной пружины 19 возвращается в исходное нулевое положение, в котором и фиксируется посредством фиксатора 15.
Расширение зоны действия получено за счет кинематической развязки рабочего (XX (p ) и нерабочих ( yiy ; zz ) движений и перенесения функции управления на рабочий рычаг, длина L которого определяет
допустимые отклонения от путевого маркера 25. При этом снижаются требования к точности позиционирования объекта в 10 и более раз по сравнению с точностью, требуемой для позиционирования пластин 3 и 4 в рабочих зазорах 13 и 14
Расширение зоны действия индикатора по сравнению с известным индукционным датчиком положения позволяет снизить требования к точности позиционирования и использовать его на мобильных объектах, перемещающихся, например, не только по рельсовым направлениям но и на шинном ходу, которые характеризуются большими механическими колебаниями при перемещении.
Положительный эффект от применения индикатора, использующего в качестве индуктивных элементов выпускаемые промышленностью бесконтактные индукционные датчики положения типа ПИЩ КВД и др достигается за счет расширения области их применения при автоматизации технологи5
0
меских процессов в сельском хозяйстве и промышленности.
Формула изобретения Индикатор местонахождения объекта, содержащий закрепленный в корпусе элемент, установленный с возможностью взаимодействия с ферромагнитной пластиной, блок питания и выходное реле, отличающийся тем, что, с целью расширения функциональных возможностей за счет дополнительного определения направления перемещения обьекта, он снабжен вторым индуктивным элементом и второй ферромагнитной пластиной, обе пластины закреплены на введенной оси вращения, установленной в корпусе, выполнены в виде круговых секторов и смещены друг относительно друга в линейном и угловом отношении, вторая пластина установлена с возможностью взаимодействия с вторым индуктивным элементом, а на одном из концов оси закреплены введенный подпружиненный рычаг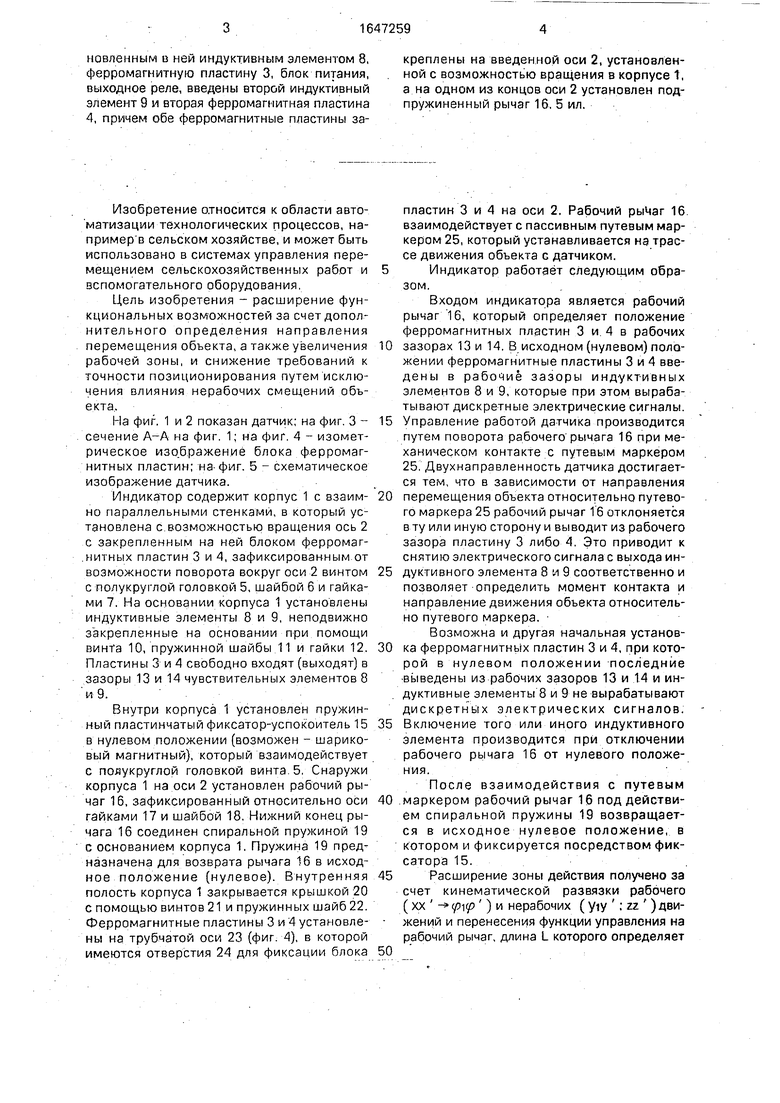
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для измерения силовых характеристик электродвигателя с качающимся ротором | 1989 |
|
SU1705784A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2375674C2 |
| КОЛЕСО ОБОЗРЕНИЯ И ЕГО УЗЛЫ | 2001 |
|
RU2207895C1 |
| ТЕЛЕВИЗИОННЫЙ ДАТЧИК КАРТЫ | 1971 |
|
SU299741A1 |
| УНИВЕРСАЛЬНАЯ МАШИНА ТЕПЛОВОЙ РЕЗКИ И ЗАЧИСТНОЙ ИНСТРУМЕНТ ДЛЯ НЕЕ | 2015 |
|
RU2594547C1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1980 |
|
SU901818A2 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
| СЕЛЕКТОР РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2013 |
|
RU2551786C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
Изобретение относится к автоматизации технологических процессов, например, в сельском хозяйстве и может быть использовано в системах управления перемещением сельскохозяйственных роботов и вспомогательного оборудования. Целью изобретения является расширение функциональных возможностей за счет дополнительного определения направления перемещения объекта. Поставленная цель достигается тем, что в устройство, содержащее корпус 1 с уста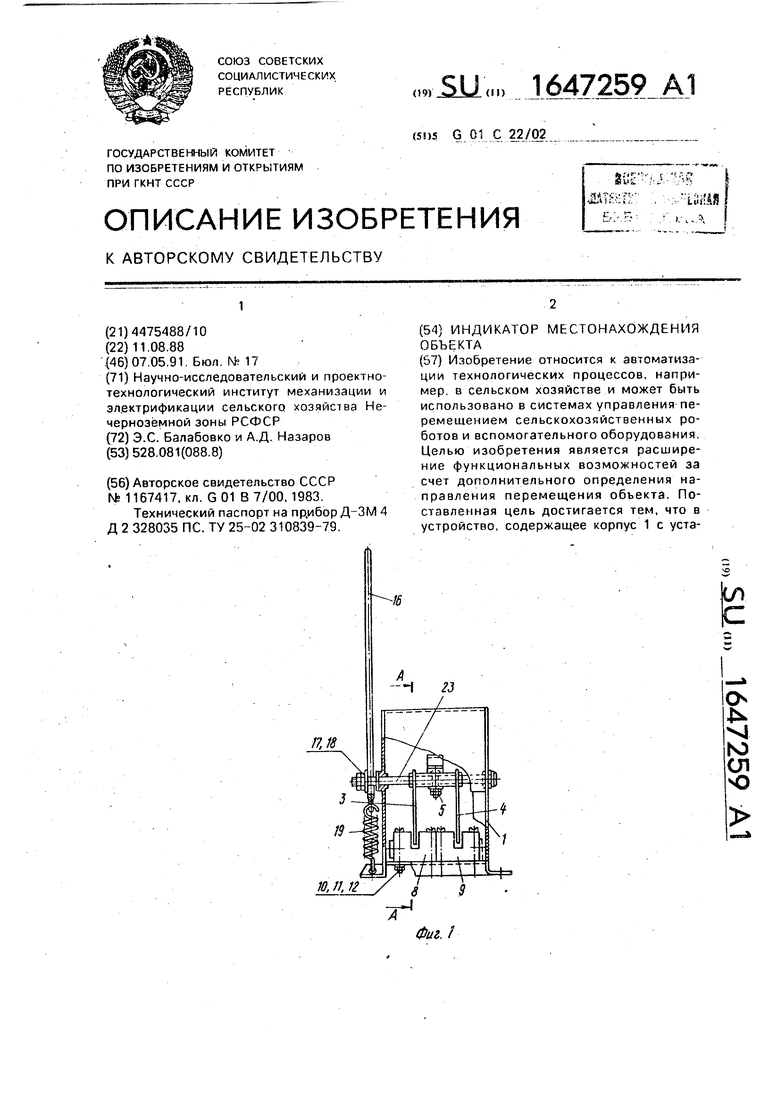
Фиг 2
А-А
фиг.З
/4VJ
Фиг. 5
19
| Устройство для преобразования перемещений | 1983 |
|
SU1167417A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
