чика 13 с якорем 14, размещенным на оправке 11. С пятами 12 взаимодействуют рычаги 15 и 16 узла 4 нагружателей, выполненного в виде двух идентичных частей 5 и 6, состоящих из динамометра в виде упругой рамки, рычагов 15 и 16 и бесконтактных индуктивных задатчиков 22, Рампа в виде
параллелограмма содержит упругие 23 и жесткие 24 перемычки. Второй и третий датчики расположены по оси параллелограмма между упругими перемычками рамки. Стенд позволяет повысить точность измерения механической характеристики двигателя. 4 ил.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля подшипников качения | 1990 |
|
SU1751654A1 |
| Стенд для испытания электрошпинделей | 1977 |
|
SU746236A1 |
| Стенд для испытания фрикционных муфт | 1980 |
|
SU964513A1 |
| Установка для испытания редуктора | 2023 |
|
RU2809048C1 |
| Индуктивный динамометр | 1977 |
|
SU699365A1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК УДАРНО-СПУСКОВЫХ МЕХАНИЗМОВ ОРУЖИЯ | 2010 |
|
RU2442093C1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭНЕРГОУСТАНОВОК | 2018 |
|
RU2673869C1 |
| УСТРОЙСТВО С ЭЛЕКТРОПРИВОДОМ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2007 |
|
RU2344863C2 |
| Стенд для исследования динамических характеристик электроприводов | 1980 |
|
SU953488A1 |

Изобретение относится к электротехнике. Цель изобретения - повышение точности измерения характеристик. Стенд для измерения силовых характеристик электродвигателя с качающимся ротором содержит узел 2 для установки электродвигателя 3, узел 7 контроля перемещения ротора 8, электронный блок 9 измерения характеристик и блок питания 10. Узел 7 выполнен в виде измерительной оправки 11 с двумя пятами 12 и первого бесконтактного индуктивного датIS 19 11 -4 о 14 11 ,- со С 4 31 VJ О «3 00 
Изобретение относится к прецизионному машиностроению, в частности к приборам для измерения силовых характеристик прецизионных электромеханических преобразователей.
Электродвигатели с качающимся ротором (электромеханические преобразователи) нашли широкое применение в качестве первичных управляющих органов электрогидравлических усилителей, в силовых и других механизмах авиационной и реактивной техники. Область применения указанных электродвигателей накладывает повышенные требования к точности воспроизведения их рабочих параметров и надеж- ности. Это предполагает использование соответствующего стендового оборудования для контроля, наладки и испытания электродвигателей, обеспечивающего высокую точность измерения параметров в условиях нагружения, близких к эксплуатационным, и достаточную производительность испытаний. До настоящего времени не имеется специализированного стендового оборудования, позволяющего провести комплекс- ные испытания, включающие испытания в заданном силовом поле, измерения положения магнитной и механической нейтралей электродвигателя. Измерение перемещений качающегося ротора электродвигателя производят при помощи оптических микроскопов с визуальным отсчетом измеряемых величин без механической нагрузки ротора.
Предлагаемый стенд является попыткой создания прибора, обеспечивающего измерение перемещения ротора с помощью индуктивных датчиков перемещения при воздействии на ротор силового поля заданной жесткости, а также снятия механической характеристики электродвигателя при отсутствии управляющего электрического сигнала статора электродвигателя.
Известен стенд для контроля перемещения ротора, содержащий основание, узел установки ротора, узел контроля перемеще- ния ротора, соединенный с блоком регистрации, при этом узел контроля ротора, соединенный с блоком регистрации, при
этом узел контроля выполнен в виде емкостного датчика, взаимодействующего с элементами ротора.
Стенд обеспечивает контроль радиальных зазоров элементов ротора при его вращении, однако не позволяет контролировать перемещения качающегося ротора под нагрузкой.
Наиболее близким к предлагаемому является стенд для измерения силовых характеристик электродвигателей с поступательно перемещающимся ротором, содержащий основание, узел установки электродвигателя, узел нагружателей с корпусом, узел контроля перемещения ротора, электронный блок измерения и регистрации характеристик электродвигателя и блок питания, при этом узел нагружения выполнен в виде последовательно соединенных пружины растяжения и груза, взаимодействующих с ротором.
Стенд обеспечивает косвенное измерение силовых характеристик электродвигателя по величине ускорения и известной массе груза, при этом величина ускорения определяется двойным дифференцированием пути, пройденного ротором. Стенд не обеспечивает прямого снятия силовых эксплуатационных характеристик электродвигателя в силовом поле, воздействующем на ротор по определенному закону, соответствующему конкретным условиям эксплуатации электродвигателя. Косвенные измерения снижают точность полученных результатов. Кроме того, стенд может быть использован только для контроля силовых электродвигателей, имеющих достаточно большие величины перемещений ротора для обеспечения записи пройденного ротором пути и достаточного разгона груза.
Недостатком стенда является невысокая точность снятия силовых характеристик электродвигателя и невозможность использования стенда для контроля электродвигателей с качающимся ротором при максимальных перемещениях ротора не более 0,5 мм.
Цель изобретения - повышение точности измерения характеристик электродвигателя.
Указанная цель достигается тем, что стенд для измерения силовых характеристик электродвигателя с качающимся ротором, содержащий основание, узел для установки электродвигателя, узел нагружа- телей с корпусом, узел контроля перемещения ротора, электронный блок измерения и регистрации характеристик электродвигателя и блок питания, снабжен тремя бескон- тактными индуктивными датчиками перемещения с якорем в виде ферромагнитных пластин, а узел контроля перемещения выполнен в виде измерительной опрааки, предназначенный для установки на ротор и снабженной двумя соосными пятами, ось которых лежит в плоскости качаний ротора, и первого бесконтактного индуктивного датчика, якорь которого размещен на оправке, при этом узел нагружателей выполнен в виде двух идентичных частей, закрепленных на основании стенда зеркально симметрично относительно от установки проверяемого электродвигателя, причем каждая из частей узла нагружателей состоит из динамометра в виде упругой рам ки, рычага и второго или третьего бесконтактного индуктивного датчика, при этом рамка выполнена в виде параллелограмма, образованного двумя парами противоположно расположенных упругих и жестких перемычек, бесконтактный датчик расположен по оси параллелограмма между его упругими перемычками, установлен с возможностью осевого перемещения на одной из жестких перемычек, связанной с корпусом нагружателей, а на другой жесткой перемычке закреплен якорь датчика и рычаг для взаимодействия с одной из пят измерительной оправки,
Такое выполнение стенда обеспечивает возможность измерения силовых характеристик электродвигателя с качающимся ротором с максимальной амплитудой качания до 0,5 мм. Обеспечивается непосред- ственное измерение перемещения ротора без нагрузки и под нагрузкой, которая обеспечиваются нагружателями. Стенд позволяет снимать силовые характеристики электродвигателя в функции параметров электропитания под нагрузкой, характеристику электродвигателя без внешней нагрузки, а также механическую характеристику упругой системы электродвигателя без электропитания путем перемещения ротора с помощью нагружателей с измерением отклонения ротора и усилия, вызвавшего это отклонение. Это позволяет
определить магнитную и механическую ней- трали электродвигателя.
Таким образом достигается повышение точности измерения силовых характеристик
электродвигателя с качающимся ротором.
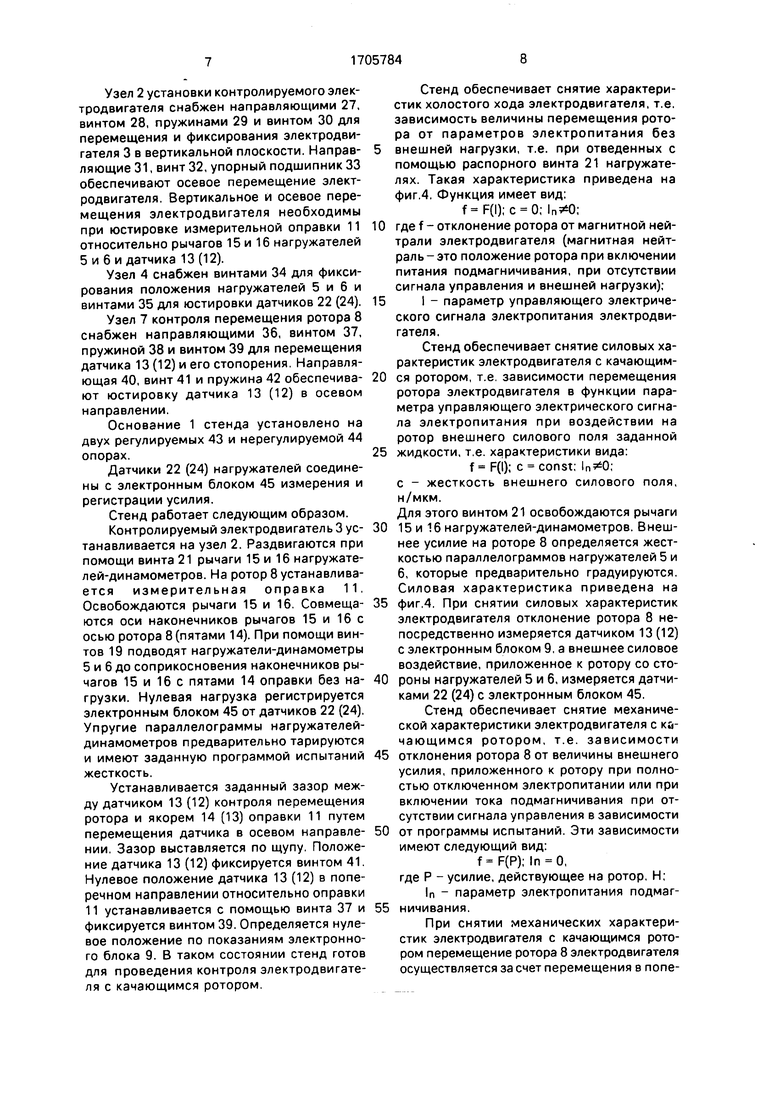
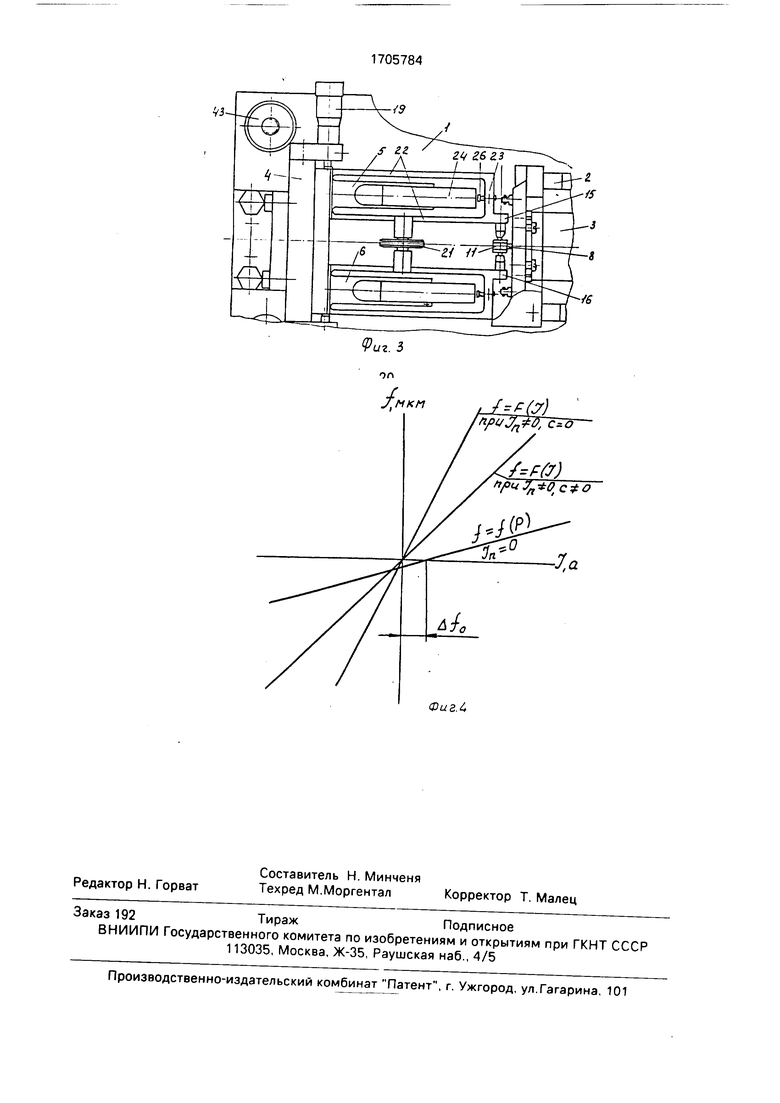
На фиг.1 показана кинематическая схема стенда; на фиг.2 - стенд, общий вид; на фиг.З - то же, вид сверху; на фиг.4 - силовая (с электропитанием) и механическая (без
0 электропитания) характеристики электродвигателя с качающимся ротором.
Стенд для измерения силовых характеристик электродвигателя с качающимся ротором содержит основание 1 (фиг. 1-3), узел
5 2 для установки электродвигателя 3, узлом 4 нагружателей 5 и 6, узел 7 контроля перемещения ротора 8 электродвигателя 3, электронный блок 9 измерения и регистрации характеристик электродвигателя 3 и блок
0 питания 10.
Узел 7 контроля перемещения выполнен в виде измерительной оправки 11. предназначенной для установки на ротор 8 и снабженной двумя соосными пятами 12
5 (14), ось которых лежит в плоскости качаний ротора 8, и бесконтактного инуктивно- го датчика 13 (12), якорь 14 (13) которого, выполненный в виде ферромагнитной пластины, размещен на оправке 11. Две соос0 ные пяты 12 (14) предназначены для взаимодействия с рычагами 15 и 16 узла 4 нагружателей, выполненного в виде двух идентичных частей 5 и 6, установленных на корпусе 17 нагружателей и закрепленных на
5 основании 1 стенда зеркально симметрично относительно от установки проверяемого электродвигателя 3, при этом каждая из частей 5 и б снабжена механизмом 18 перемещения, выполненным в виде пор винт-гайка
0 19 и пружина возврата 20. Между рычагами 15 и 16 установлено распорный винт 21. Каждая из частей 5 и 6 узла 4 нагружателей состоит из динамометра в виде упругой рамки, рычага 15 и 16 и бесконтактного индук5 тизного датчика 22 (24), при этом рамка выполнена в виде параллелограмма, образованного двумя парами противоположно расположенных упругих 23 (22) и жестких 24 (23) перемычек, бесконтактный датчик 22
0 (24) расположен по оси параллелограмма между его упругими перемычками 23 (22). установлен с возможностью осевого перемещения и закреплен винтом 25 на одной из жестких перемычек 24 (23), связанной с кор5 пусом 17 нагружателей 5 и 6, а на другой жесткой перемечке - выполненный в виде ферромагнитной пластины якорь 26 датчика 22 (24) и рычаг 15 или 16 для взаимодействия с одной из пят 12 (14) измерительной оправки 11.
Узел 2 установки контролируемого электродвигателя снабжен направляющими 27, винтом 28, пружинами 29 и винтом 30 для перемещения и фиксирования электродвигателя 3 в вертикальной плоскости. Направляющие 31, винт 32, упорный подшипник 33 обеспечивают осевое перемещение электродвигателя. Вертикальное и осевое перемещения электродвигателя необходимы при юстировке измерительной оправки 11 относительно рычагов 15 и 16 нагружателей 5 и 6 и датчика 13(12).
Узел 4 снабжен винтами 34 для фиксирования положения нагружателей 5 и 6 и винтами 35 для юстировки датчиков 22 (24).
Узел 7 контроля перемещения ротора 8 снабжен направляющими 36, винтом 37, пружиной 38 и винтом 39 для перемещения датчика 13 (12) и его стопорения. Направляющая 40, винт 41 и пружина 42 обеспечивают юстировку датчика 13 (12) в осевом направлении.
Основание 1 стенда установлено на двух регулируемых 43 и нерегулируемой 44 опорах.
Датчики 22 (24) нагружателей соединены с электронным блоком 45 измерения и регистрации усилия.
Стенд работает следующим образом.
Контролируемый электродвигатель 3 устанавливается на узел 2. Раздвигаются при помощи винта 21 рычаги 15 и 16 нагружате- лей-динамометров. На ротор 8 устанавливается измерительная оправка 11. Освобождаются рычаги 15 и 16. Совмещаются оси наконечников рычагов 15 и 16 с осью ротора 8 (пятами 14). При помощи винтов 19 подводят нагружатели-динамометры 5 и 6 до соприкосновения наконечников рычагов 15 и 16 с пятами 14 оправки без нагрузки. Нулевая нагрузка регистрируется электронным блоком 45 от датчиков 22 (24). Упругие параллелограммы нагружателей- динамометров предварительно тарируются и имеют заданную программой испытаний жесткость.
Устанавливается заданный зазор между датчиком 13 (12) контроля перемещения ротора и якорем 14 (13) оправки 11 путем перемещения датчика в осевом направлении. Зазор выставляется по щупу. Положение датчика 13 (12) фиксируется винтом 41. Нулевое положение датчика 13 (12) в поперечном направлении относительно оправки 11 устанавливается с помощью винта 37 и фиксируется винтом 39. Определяется нулевое положение по показаниям электронного блока 9. В таком состоянии стенд готов для проведения контроля электродвигателя с качающимся ротором.
Стенд обеспечивает снятие характеристик холостого хода электродвигателя, т.е. зависимость величины перемещения ротора от параметров электропитания без
внешней нагрузки, т.е. при отведенных с помощью распорного винта 21 нагружате- лях. Такая характеристика приведена на фиг.4. Функция имеет вид: (l);c 0;
где f - отклонение ротора от магнитной нейтрали электродвигателя (магнитная нейтраль -это положение ротора при включении питания подмагничивания, при отсутствии сигнала управления и внешней нагрузки);
I - параметр управляющего электрического сигнала электропитания электродвигателя.
Стенд обеспечивает снятие силовых характеристик электродвигателя с качающимся ротором, т.е. зависимости перемещения ротора электродвигателя в функции параметра управляющего электрического сигнала электропитания при воздействии на ротор внешнего силового поля заданной
жидкости, т.е. характеристики вида:
f F(l); с const; с - жесткость внешнего силового поля, н/мкм. Для этого винтом 21 освобождаются рычаги
15 и 16 нагружателей-динамометров. Внешнее усилие на роторе 8 определяется жесткостью параллелограммов нагружателей 5 и 6, которые предварительно градуируются. Силовая характеристика приведена на
фиг.4. При снятии силовых характеристик электродвигателя отклонение ротора 8 непосредственно измеряется датчиком 13 (12) с электронным блоком 9, а внешнее силовое воздействие, приложенное к ротору со стороны нагружателей 5 и 6, измеряется датчиками 22 (24) с электронным блоком 45.
Стенд обеспечивает снятие механической характеристики электродвигателя с качающимся ротором, т.е. зависимости
отклонения ротора 8 от величины внешнего усилия, приложенного к ротору при полностью отключенном электропитании или при включении тока подмагничивания при отсутствии сигнала управления в зависимости
от программы испытаний. Эти зависимости имеют следующий вид:
(P); ln 0,
где Р - усилие, действующее на ротор, Н; In - параметр электропитания подмагничивания.
При снятии механических характеристик электродвигателя с качающимся ротором перемещение ротора 8 электродвигателя осуществляется за счет перемещения в поперечном направлении нагружателей - 5 или 6 при помощи винтов 19. При этом усилие, приложенное к ротору, измеряется датчиками 22 (24) с электронным блоком 45, а перемещение ротора - датчиком 13 (12) с блоком 9. Таким образом осуществляется принудительное перемещение ротора электродвигателя на заданную величину с известным усилием. При снятии механических характеристик без тока подмагничивания определяется механическая нейтраль ротора (положение ротора при отсутствии нагрузки и электропитания).
Сравнение положения механической и магнитной (электрической) нейтралей обеспечивает оценку качества электродвигателя с качающимся ротором. При отклонении нейтралей Af0 больше допустимой величины электродвигатель направляется на доработку.
Таким образом, стенд обеспечивает повышение точности измерения благодаря непосредственному измерению отклонения ротора, усилий, воздействующих на ротор, а также благодаря выполнению параллелограммов нагружателей в виде одной детали, что снижает потери на внутреннее трение указанного упругого элемента, и уменьшает гистерезис до 0,5-1 мкм.
Стенд обеспечивает измерение отклонения ротора в пределах до 0,5 мм с точностью до 0,5 мкм при жесткости внешней нагрузки от 16 г/мкм и менее.
Внедрение стенда позволяет повысить качество юстировки и контроля электродвигателей с качающимся ротором.
Формула изобретения
Стенд для измерения силовых характеристик электродвигателя с качающимся ротором, содержащий основание, узел для установки электродвигателя, узел нагружателей с корпусом, узел контроля перемещения ротора, электронный блок измерения и регистрации характеристик электродвигателя и блок питания, отличающийся тем, что, с целью повышения точности измерения характеристик, стенд снабжен тремя бесконтактными индуктивными датчиками
перемещения с якорем в виде ферромагнитных пластин, а узел контроля перемещения выполнен в виде измерительной оправки, предназначенной для установки на ротор и снабженной двумя соосными пятами, ось
которых лежит в плоскости качаний ротора, и первого бесконтактного индуктивного датчика, якорь которого размещен на оправке, при этом узел нагружателей выполнен в виде двух идентичных частей,
закрепленных на основании стенда зеркально симметрично относительно оси установки проверяемого электродвигателя, причем каждая из частей узла нагружателей состоит из динамометра в виде упругой рамки, рычага и бесконтактного индуктивного датчика, при этом рамка выполнена в виде параллелограмма, образованного двумя парами противоположно расположенных упругих и жестких перемычек, бесконтактный датчик расположен по оси параллелограмма между его упругими перемычками, установлен с возможностью осевого перемещения на одной из жестких перемычек, связанной
с корпусом нагружателей, а на другой жесткой перемычке закреплены якорь датчика и рычаг для взаимодействия с одной из пят измерительной оправки.
n
/&
rl.
1 и Ч fs sr
-Ft
vr
L-TvNS
Фиг. 3
Фиг.Ь
| Устройство для измерения радиального зазора турбомашины | 1977 |
|
SU667800A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для снятия механической характеристики линейного электродвигателя | 1980 |
|
SU900129A2 |
| jA | |||
