-5
fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатное устройство для управления | 1987 |
|
SU1522155A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Устройство для контроля, учета и автоматического управления работой сеялки | 1988 |
|
SU1616531A1 |
| Устройство для регулирования скорости движения поезда | 1989 |
|
SU1787823A1 |
| Устройство для автоматической локомотивной сигнализации | 1989 |
|
SU1638047A1 |
| Устройство для контроля работы сельскохозяйственных машин для внесения жидкостей | 1988 |
|
SU1676565A1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОИЗВОДСТВОМ РАБОТ ПО ОБРАБОТКЕ ТЕРРИТОРИЙ | 2000 |
|
RU2173884C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА НА БОКОВЫХ ПУТЯХ СТАНЦИИ | 1993 |
|
RU2083389C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2005 |
|
RU2283255C1 |
Изобретение относится к железнодорожной автоматике и телемеханике. Цель изобретения - повышение точности. В момент прохода контрольной точки приемник и блок определения координаты пути и количества свободных блок-участков определяют адрес ячейки памяти блока задания допустимой скорости. Измеритель пути устанавливается в исходное состояние. После перезаписи информации во второй и третий регистры памяти происходит запись в первый регистр памяти из блока задания допустимой скорости. Датчик пути и скорости совместно с измерителем пути определяют расстояние до первой контрольной точки, которое указывает индикатор пути, Датчик пути и скорости и третий регистр памяти совместно воздействуют на блок сравнения. Если фактическая скорость превышает расчетную, то блок сравнения выключает исполнительный орган. 1 ил.
Изобретение относится к железнодорж- ной автоматике и телемеханике, а именно к устройствам для контроля скорости поезда.
Цель изобретения - повышение точности.
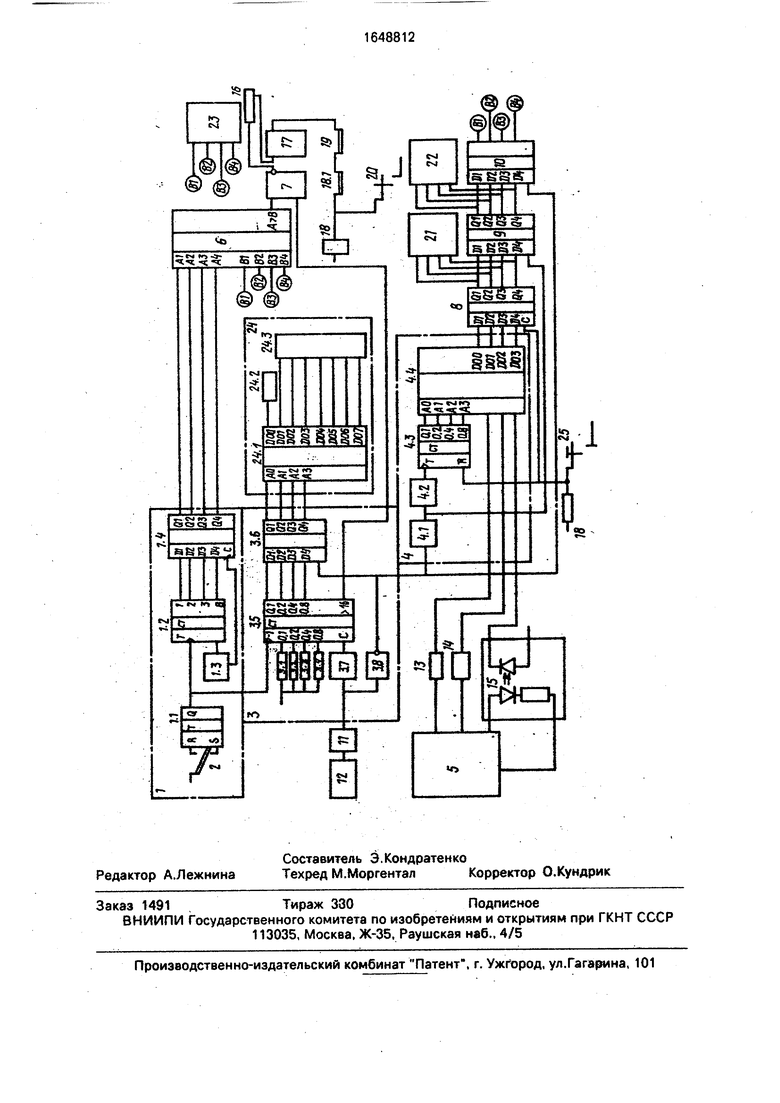
На чертеже представлена структурная схема предлагаемого устройства.
Устройство имеет датчик 1 пути и скорости, содержащий триггер 1.1 для исключения дребезга контакта 2 реле, связанного с эксцентриком, размещенным на колесе (реле, эксцентрик и колесо не показаны). Триггер 1.1 выходом соединен с одним из входов счетчика 1.2 импульсов, к другому входу которого одним из выходов подключен генератор 1.3 для определения скорости движения, другой выход которого и выходы счетчика 1.2 соединены с соответствукЗщи- ми входами регистра 1.4. выходами которого образован один из выходов датчиков датчика 1. Устройство имеет измеритель 3 пути, одним из выходов соединенный с одним из входов блока 4 задания допустимой скорости, другой вход которого подключен к выходу блока 5 определения координаты и количества свободных блок-участков. Один из входов блока 6 сравнения подключен к упомянутому выходу датчика 1. Устройство имеет элемент И-НЕ 7 и регистры 8-10 памяти, первый из которых входом соединен с одним. из выходов блока 4, а выходом - с одним из входов второго регистра 9 памяти, другой выход которого подключен к другому выходу блока 4. Один из выходов второго регистра 9 памяти соединен с одним из входов третьего регистра 10 памяти, другой вход которого подключен к второму выходу измерителя 3 пути. Выход регистра 10 сое2
а а
N
динен с другим входом блока 6 сравнения, выход которого подключен к одному из входов элемента И-НЕ 7, другой вход которого соединен с третьим выходом измерителя 3 пути, вход которого через один из оптронов 11 связан с приемником 12. В выходные цепи блока 5 для развязки включены оптро- ны 13-15. Выход элемента И-НЕ 7 через пятый оптрон 16 и усилитель 17 связан с исполнительным органом 18 через его собственный контакт 18.1 и контакт 19. В цепь самоблокировки исполнительного органа 18 включен контакт 20 кнопки бдительности (сама кнопка не показана). На выходе регистров 8-10 памяти включены индикаторы 21-23 скорости. На выходе измерителя 3 пути включен индикатор 24 пути, состоящий из трех семисегментных ячеек 24.1, 24.2 и 24.3. Измеритель 3 пути содержит резисторы 3.1-3.4, подключенные к входу счетчика 3.5, выходом соединенного с входом регистра З.б, выходом которого образован один из выходов измерителя 3. К входу счетчика 3.5 подключен формирователь 3.7 сигнала, к входу которого подключен инвертор 3.8. выходом связанный с входом регистра 3.6, которым образован другой выход измерителя 3. Блок 4.допустимой скорости содержит формирователь 4.1 сигнала, входом которого образован вход блока 4, а выходом - один из выходов блока 4, х которому подключен входом другой формирователь 4.2 сигнала, выходом соединенный с входом счетчика 4.3, к выходу которого входом подключен регистр 4.4, выходом которого образован выход блока 4. В цель питания счетчика 4.3 включен контакт 25 кнопки бдительности.
Устройство работает следующим образом.
Приемник 12 через каждые 500 м (300- 2000 м) получает воздействие от точечного датчика пути (не показан), которое в закодированном виде указывает номер элемента пути. Блок 5 расшифровывает информацию о количестве, свободных блок-участков. На основании информации о координате (приемник 12) и количестве свободных впереди лежащих блок-участков (блок 5) определяется адрес ячейки блока 4. В ячейках записаны в двоичном коде с дискретностью 10 км/ч скорости выхода с каждого элемента пути. Для каждого элемента пути предусмотрено несколько ячеек памяти.
В момент прохода контрольной точки (граница элемента пути) приемник 12 и блок 5 определяют новый адрес ячейки памяти блока 4. Кроме того, в этот момент с приемника 12 посылается импульс для установки измерителя 3 пути в исходное положение и
он же поступает на вход регистра 10, в который заносится информация с регистра 9. По истечении интервала времени, определяемого формирователем 4.1, информация из
регистра 8 переписывается в регистр 9, После перезаписи информации в регистры 9 и 10 происходит запись информации в регистр 8 из блока 4, К выходам регистров подключены индикаторы 21-23 скорости,
которые индицируют содержимое регистров, т.е. указывают максимально допустимую скорость выхода с каждого элемента пути впереди лежащего участка протяженностью 1.5-2 км.
Датчик 1 пути и скорости совместно с измерителем 3 определяют расстояние до первой контрольной точки, это расстояние указывает индикатор 24. Кроме того, датчик t пути и скорости совместно с регистром 10
воздействует на блок 6 сравнения, который сравнивает допустимую скорость (записана в регистре 10) с фактической (определяет датчик 1 пути и скорости). Если фактическая скорость начинает превышать расчетную, то
блок 6 сравнения выключает исполнительный орган 18.
Формула изобретения Устройство для контроля скорости подвижного состава, содержащее датчик пути и скорости, блок задания допустимой скорости, блок сравнения, блок локомотивной сигнализации, исполнительный орган и измеритель пути, одним из выходов соединенный с одним из входов блока задания допустимой скорости, другой вход которого подключен к выходу блока определения координаты пути и количества свободных блок-участков, один из входов блока сравнения подключен к выходу датчика скорости, отличающееся тем, что, с целью повышения точности, оно снабжено элементом И-НЕ и регистрами памяти, один из которых входом соединен с одним из выходов блока задания допустимой скорости, а выходом - с одним из входов второго регистра памяти, другой вход которого подключен к другому выходу блока задания допустимой скорости, а один из выходов
соединен с одним из входов третьего регистра памяти, другой вход которого подключен к второму выходу измерителя пути, а выход третьего регистра памяти соединен с другим входом блока сравнения, выход которого подключен к одному из входов элемента И-НЕ, другой вход которого соединен с третьим выходом измерителя пути, а выход связан с исполнительным органом.
| Никифоров Б.Д | |||
| и др | |||
| Автоматизация управления торможением поездов | |||
| М.: Транспорт, 1985, с.76, р.29. |
