Система относится к средствам реализации производственных процессов, обеспечивающих обработку территорий, включая полив, разбрызгивание или посыпку реагентами, и другие виды обработки территорий, в том числе контейнерных площадок, улиц и иных территорий, и постоянный контроль за указанными процессами.
Известна система сбора и передачи сообщений о транспортных средствах, содержащая установленные на транспортном средстве приемник навигационных GPS-сигналов, блок управления, блоки памяти с информацией о транспортном средстве, устройство передачи и приема сообщений для передачи и приема информации с диспетчерского пункта. На диспетчерском пункте система содержит устройство передачи и приема сообщений, блок выделения сообщений, базу данных и средство отображения (см. WO 98/11513 A1, G 07 C 5/00, 19.03.1998 и RU 2113013 C1, G 08 G 1/01).
Известная система не обеспечивает контроль и управление транспортными средствами, предназначенными для обработки территорий.
Известна система контроля и управления работой транспортных средств, содержащая на транспортном средстве приемник навигационных сигналов GPS, блок формирования кода номера транспортного средства, блок формирования сигналов контроля, формирователь сообщения, блок управления и устройство приема и передачи сообщений, на диспетчерском пункте устройство приема и передачи сообщений, блоки памяти, декодер, блок отображения. Известная система позволяет контролировать работу и перемещение транспортных средств и отображать на карте местоположение контролируемого транспортного средства (RU 2143745 C1, G 08 C 19/12, 27.18.1999). Известно устройство для контроля за работой транспортных средств, содержащее оборудование, установленное на каждом транспортном средстве, и оборудование, установленное на диспетчерском пункте.
На транспортном средстве установлены датчики, связанные с формирователем сообщения транспортного средства в виде счетчика, блока усилителей регистра сдвига, связанным с ним передатчиком, диспетчерский пункт с цифровыми индикаторами, блоком ввода команд, информационным табло, регистратором. Устройство позволяет контролировать транспортные средства, координировать их работу в едином центре управления, регистрировать работу транспортных средств (SU 0983733 A, G 07 C 5/10, 25.12.1982).
Известна система контроля и управления за работой транспортных средств на карьерах при селективной выемке руд. Система содержит на транспортном средстве датчики состояния исполнительных механизмов, средства контроля координат местоположения и номера транспортного средства, средства контроля за параметрами исполнительных механизмов, формирователь сообщения и устройство передачи и приема сообщений, связанное через каналы связи, средства хранения и обработки информации на диспетчерском пункте (см. RU 2100844 C1, G 07 C 5/08, 27.12.1997).
Все известные системы дистанционного управления не обеспечивают дистанционное управление транспортными средствами, используемыми при обработке территорий.
Техническим результатом заявленной системы контроля и управления работой транспортных средств, используемых при обработке территорий, в том числе уборки, является расширение арсенала средств, т.е. использование средств контроля местоположения транспортного средства, состояния исполнительных механизмов. Система обеспечивает управление исполнительными механизмами, в частности механизмами разбрызгивания различных веществ, посыпки территорий или иной обработки. Система обеспечивает контроль за графиком работы, мониторинг за процессом производства работ, обеспечение управления с диспетчерского пункта.
Технический результат достигается тем, что система контроля и управления работой транспортного средства по обработке территорий содержит, по крайней мере, на одном транспортном средстве приемник навигационных сигналов, блок формирования кода номера транспортного средства, счетчик текущего времени, блок формирования сигналов контроля, выходы которых подключены к формирователю сообщения, блок управления исполнительным механизмом, один вход которого соединен с выходом блока передачи сигнала управления уровнем дозирования с диспетчерского пункта, другой вход соединен с выходом управления уровнем дозирования водителя, один выход блока управления исполнительным механизмом соединен через блок контроля с соответствующим входом формирователя сообщений, другой является управляющим выходом системы, на диспетчерском пункте устройство передачи и приема сообщений, связанные через канал связи с устройством передачи и приема сообщений на транспортном средстве, выход устройства передачи и приема сообщений диспетчерского пункта через блок выделения сигналов подключен к первым входам блока контроля за процессом обработки, а через декодер адресным входам блока памяти, информационные выходы которого подключены ко вторым входам блока контроля за процессом обработки, выходы которого и выходы указанного блока выделения сигналов через устройство формирования данных подключены к блоку отображения, блок ввода команд управления соединен с соответствующим входом устройства передачи и приема сообщений.
На транспортном средстве управляющий выход блока передачи сигнала управления уровнем дозирования с диспетчерского пункта подключен к блокирующему входу блока управления уровнем дозирования водителя.
На диспетчерском пункте вход блока задания команд связан с устройством формирования данных.
Блок контроля за процессом уборки предназначен для контроля за обработкой территорий и содержит блок сравнения кода номера транспортного средства, один вход которого предназначен для подачи на него заданных номеров транспортных средств, другой вход соединен с выходом поступившего кода номера транспортного средства блока выделения сигналов, выход является первым выходом блока контроля за процессом обработки, блок сравнения кода времени, один вход которого предназначен для подачи на него заданного временного интервала уборки, другой вход соединен с выходом кода времени передачи сообщения блока выделения сигналов, выход является вторым выходом указанного блока контроля, блок сравнения кода координат территории, один вход которого предназначен для подачи на него заданной координаты территории, другой вход соединен с выходом координаты местоположения транспортного средства блока выделения сигналов, выход является третьим выходом блока контроля за процессом обработки.
Блок контроля за процессом обработки может быть предназначен для контроля за участками улиц, проездов, площадей или других территорий и содержит блок сравнения кодов номера транспортного средства, один вход которого предназначен для подачи на него заданных номеров транспортных средств, другой вход соединен с выходом поступившего кода номера транспортного средства блока выделения сигналов, выход является первым выходом указанного блока контроля, блок сравнения кодов времени, один вход которого предназначен для подачи на него заданного временного интервала обработки, другой вход соединен с выходом кода времени передачи сообщения блока выделения сигналов, выход является вторым выходом указанного блока контроля, блок сравнения кодов координат участка территории, один вход которого предназначен для подачи на него заданных координат участков территории, другой вход соединен с выходом кода местоположения транспортного средства блока выделения сигналов, выход является третьим выходом указанного блока контроля и соединен через счетчик с одним входом блока сравнения числа участков уборки, другой вход которого предназначен для подачи на него заданного числа участков уборки территории, выход является соответствующим четвертым выходом указанного блока.
На фиг. 1 представлена часть системы, установленная на транспортном средстве, на фиг. 2 представлена часть системы, установленная на диспетчерском пункте при обработке территорий, на фиг. 3 представлена часть системы, установленная на диспетчерском пункте при обработке территорий, в частности участков улиц.
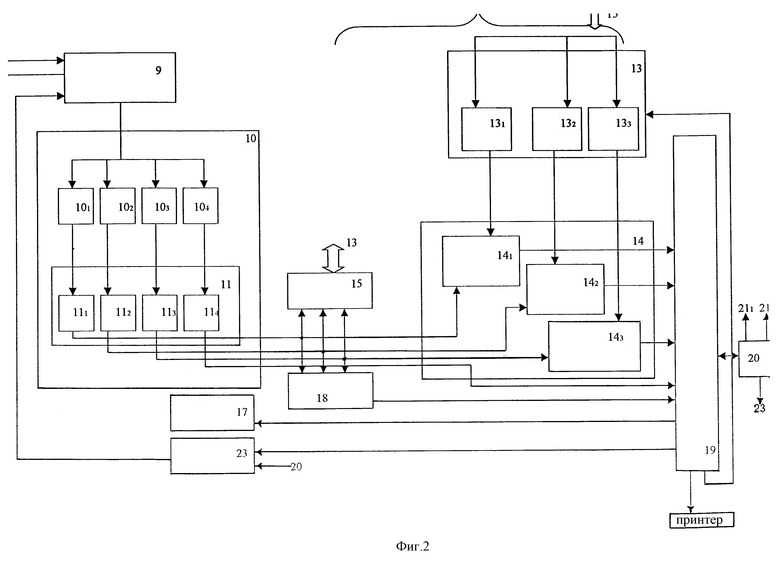
Часть заявленной системы, установленная на транспортном средстве, содержит приемник 1 навигационных GPS сигналов, блок 2 формирования кода номера транспортного средства, счетчик 3 текущего времени, блок 4 формирования сигналов контроля, к входу которого подключен блок 5 телеметрических датчиков с исполнительным или исполнительными механизмами 61-6n. Блоки 1, 2, 3, 4 подключены к формирователю 7 сообщения, выход которого соединен с входом устройства 8 приема и передачи сообщений, к выходу данного устройства подключен блок управления 22, предназначенный для управления включением блоков 1, 2, 3, 4, 6, 7, 26, связанный с соответствующими управляющими входами указанных блоков. Система на транспортном средстве также содержит блок 26 управления исполнительным механизмом обработки территорий с помощью различных материалов, выход которого через блок 30 контроля уровня дозирования соединен с соответствующим входом формирователя 7 сообщения. Выход блока 22 управления соединен с входом блока 29 передачи сигнала управления уровнем дозирования с диспетчерского пункта, один выход которого подключен к управляющему входу блока 28 управления уровнем дозирования водителем транспортного средства, выход которого и другой выход блока 29 передачи сигнала управления уровнем дозирования с диспетчерского пункта подключены соответственно к управляющим входам блока 26 управления исполнительным механизмом.
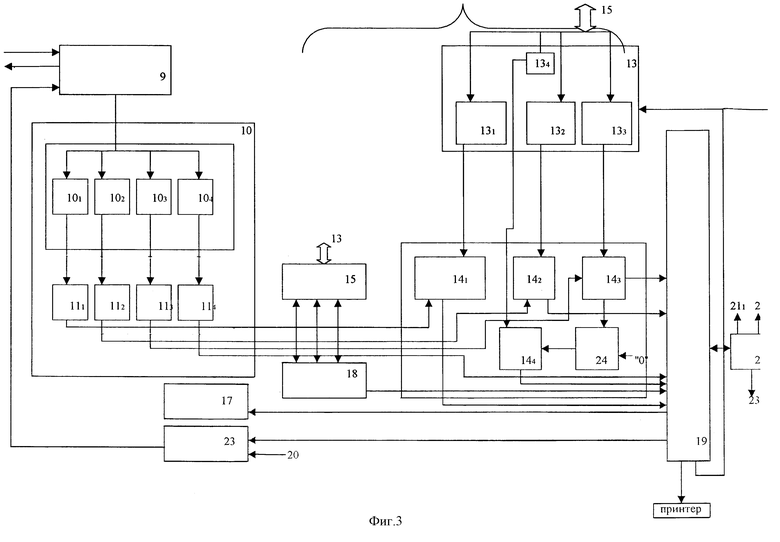
На диспетчерском пункте система (фиг. 2), работающая в режиме уборки территорий, содержит устройство 9 приема и передачи сообщений, связанное по каналу связи с устройством 8 на транспортном средстве, блок 10 выделения сигналов, включающий селектор 101 кода номера транспортного средства, селектор 102 кода времени передачи сообщения транспортным средством, селектор 103 кода координат местоположения транспортного средства, селектор сигналов контроля, связанные с устройством 9 и предназначенные для выделения из принятых сигналов сообщения указанных кодовых сигналов и сигналов контроля состояния исполнительных механизмов транспортного средства. Выделенные сигналы соответствующих сообщений поступают в первый блок 11 памяти, например выполненный в виде группы или групп регистров 111 - 114 текущих данных о транспортных средствах. Регистр 111 предназначен для хранения кода номера транспортного средства, от которого получено сообщение, регистр 112 - для хранения кода времени передачи сообщения определенным транспортным средством, регистр 11 предназначен для хранения координат местоположения транспортного средства, а регистр 114 предназначен для хранения сигналов контроля о состоянии телеметрических датчиков, в том числе состоянии исполнительных механизмов каждого транспортного средства, входящего в число транспортных средств, используемых при уборке данных территорий. Число групп указанных регистров 111 - 114 соответствует числу транспортных средств или превышает его.
На диспетчерском пункте (ДП) также установлен блок 13 памяти данных об объектах уборки, данных, заданных параметрах уборки территорий. В этом блоке 13 хранятся данные по объектам уборки: данные о зоне уборки с географическими (навигационными) координатами и допустимыми пределами изменения координат каждой из указанных зон, допустимое время уборки каждой из зон, список номеров транспортных средств Nn, участвующих в уборке этой зоны.
На диспетчерском пункте также установлены блок 14 контроля за процессом уборки зон территории, включающий блоки 141 - 143 сравнения данных, декодер параметров зоны уборки 15, связанный с регистрами 111-113 и предназначенный для преобразования сообщений о координате транспортного средства, работающего по уборке территорий или для преобразования кода номера транспортного средства в адрес зоны памяти второго блока 13 памяти с данными о заданных параметрах уборки. Декодер представляет собой, например, ПЗУ, код сообщения транспортного средства (номер, время, координата) поступает в него как адрес, на выходе декодера формируется адрес блока памяти 13, где хранятся данные по уборке, поиск которых осуществляют как по номеру, так и по времени, так и по координате.
Данные из блока 13 через соответствующие выходы поступают в блок 14 контроля за процессом обработки территории; из регистра 111 в блок 141 сравнения поступает код номера транспортного средства, а на второй вход - код транспортного средства, номер которого хранится в зоне памяти блока 13, соответствующей зоне уборки. В блок 142 из блока 13 поступают коды, соответствующие запланированному времени уборки данной зоны, и код и/или коды времени передачи сообщений транспортным средством из регистра 112, в блок 143 сравнения поступают из блока 133 код координат заданной зоны уборки, а из регистра 113 коды текущих координат транспортного средства, от которого пришло сообщение. В блоках 141, 142 и 143 осуществляют сравнение запланированных и текущих параметров, по результатам данного сравнения осуществляют следующие действия.
При совпадении этого кода номера из регистра 111 и блока 131 блок 141 выдает сигнал совпадения. В том случае, когда не обнаружено совпадение, блок сравнения 141 выдает сигнал несовпадения. Блок 142 и 143 работают аналогичным образом.
Из блока 13 в блок 142 поступает код заданного времени уборки территории, а из регистра 112 код времени передачи сообщения транспортным средством, а также в блок 143 заданные координаты зоны уборки и текущая координата транспортного средства. Для исключения неоднозначности формирования кодов времени и кода координат на транспортном средстве и хранящихся запланированных параметрах зоны уборки предусмотрено формирование кодов в виде отсчетов из заданного набора величин, например, все временные отсчеты в течение 30 мин имеют одинаковый код, все координаты в диапазоне 100 м имеют одинаковые значения и т.п. (отсчеты могут быть иными).
При совпадении или несовпадении поступивших текущих кодов параметров от транспортного средства и кодов, принадлежащих каждому параметру (номера, время, координаты) из запланированных для данной зоны уборки в блоке 14 из блоков 141 - 143 сигналы об этом поступают в устройство 19 формирования данных по уборке. Устройство 19 предназначено для формирования кодов состояния транспортного средства и связано с блоками 141 - 143 сравнения и с блоком 18 формирования сообщения о транспортном средстве, в блоке 18 формируется сообщение в виде кода номера транспортного средства, кода времени передачи сообщения, кода координат и сигналов контроля от датчиков, установленных на транспортном средстве, поступивших из регистров 111-114 в данном сеансе связи.
В устройстве 19 осуществляется объединение сообщения, поступившего из блока 18 о параметрах транспортного средства и сигналов контроля этих параметров по отношению к запланированным и хранящихся в блоке 13.
Устройство 19 связано с дешифратором сформированного сообщения. В случае, когда транспортное средство в соответствующий интервал времени не обнаружено в зоне уборки, т.е. сформированный код содержит данные о номере средства, но обнаружено с координатами, не совпадающими с зоной уборки, дешифратор получает этот код от блоков 14 и 18 и передает его в дешифратор (не показан) блока отображения для последующей индикации о том, что зона не убрана, также предусмотрено отображение информации об опоздании транспортного средства в зону уборки и т.п.
В случае соответствия заданных параметров текущим от транспортного средства на навигационной карте блока отображения убираемых территорий появляется индикация об уборке территорий и перемещении транспортных средств.
Кроме того, если в устройстве 14 контроля возникают сигналы несовпадения, то дешифратор 20 при получении кода об этом от устройства 19 включает сигнализатор 211 о несоответствии и оператор по этому сигналу может связаться с транспортным средством через выделенный канал, например по радиотелефону и т. п. Как было указано выше, данные телеметрических датчиков, в том числе о состоянии исполнительных механизмов, хранящиеся в регистре 114, также передаются в устройство 19 и через дешифратор 20 они поступают в блок отображения 17 для индикации, например состояния работы исполнительных механизмов, осуществляющих обработку.
Система работает следующим образом.
Предварительно формируют данные для навигационно-технологической карты обработки территории для транспортного средства в соответствии с маршрутом его движения, т.е. с учетом координат территории обработки.
Создается база данных координат территорий, в которой хранится информация с адресами и географическими координатами территорий (навигационная зона) с допустимыми предельными значениями географических координат. Каждая навигационная зона имеет свой размер, определяемый координатами на границе указанной зоны.
База данных включает блок 13 памяти данных об объектах обработки, например координаты территорий, заданные параметры обработки территорий и т.п. Транспортное средство (фиг. 1) отправляют по маршруту обработки одной или нескольких территорий с заданными координатами. С целью контроля за работой транспортного средства устанавливают на транспортном средстве навигационный GPS приемник. Этот приемник 1 предназначен для приема координат местоположения данного транспортного средства с помощью навигационного спутника системы GPS. Т.е. приемник принимает сигналы местоположения транспортного средства, водитель посредством блока управления 22 транспортного средства при выезде на маршрут обработки включает оборудование заявленной системы управления, установленное на каждом транспортном средстве и входящее в заявленную систему, при этом включается приемник 1, счетчик 3 текущего времени (часы), блок 2 формирования кода номера транспортного средства и блок 4 формирования сигнала контроля, например работы исполнительных механизмов, и запускает формирователь 7 сообщения. Одним из исполнительных механизмов является механизм разбрызгивания или посыпки реагентов, установленный на транспортном средстве, положение которого контролирует блок 5 телеметрических датчиков и блок контроля 30 уровня дозирования.
Транспортное средство выезжает на маршрут. Как было указано выше, водитель включает оборудование системы, и формирователь 7 сообщения формирует последовательность кодов сообщения: кода координат местоположения транспортного средства при передаче сообщения, кода номера транспортного средства, кода, соответствующего времени передачи сообщения, и кода состояния исполнительного механизма.
Это сообщение поступает в устройство 8 приема и передачи сообщений, которое передает данное сообщение по каналу радиосвязи на диспетчерский пункт. На диспетчерском пункте устройство 9 приема и передачи сообщений принимает его и передает в блок 10 выделения сигналов.
Селекторы соответствующих кодов сигналов 101 - 104, связанные с устройством 9, выделяют из каждого принятого устройством 9 сообщения соответственно код номера транспортного средства, код времени передачи сообщения, код координат транспортного средства, т.е. сигнал координат местоположения и коды сигналов состояния исполнительных механизмов, выделяемых селектором 104. Выделенные коды поступают из селекторов 1010 - 104 в одноименные с ними регистры 111 - 114 первого блока памяти 11. На этом этапе прием сообщения заканчивается и часть аппаратуры системы, установленная на диспетчерском пункте, переходит в режим контроля за процессом. Данные из регистров 111 - 113 поступают соответственно на блоки 141 - 143 сравнения блока контроля 14, кроме того, эти данные поступают в декодер 15, представляющий собой ПЗУ, в котором по каждому коду на входе согласно таблице соответствия формируется соответствующий код на выходе, являющийся адресом для считывания соответствующих данных из второго блока 13 памяти, входящего в базу данных.
Например, по коду координаты транспортного средства, в маршрут координат которого входят координаты определенной территории, из блока памяти 13 в блок 141 поступают данные о номере транспортного средства, которое должно работать на данном маршруте, а в блок 143 поступают возможные отсчеты координат, определяющие зону данной территории. Блок 13 памяти, как было указано выше, связан с декодером 15, в котором по номеру транспортного средства определяют адрес зоны памяти, где хранятся данные координат территорий, которые может обрабатывать данное транспортное средство, и по координате транспортного средства номера транспортных средств, которые могут находиться в зонах указанных территорий, формируют адреса соответствующих зон памяти блока 13 памяти. Т.о. по адресам декодера 15 из блока 13 памяти поступает код транспортного средства, который согласно плану обработки должен обрабатывать данную территорию, в блок 142 сравнения времени поступают отсчеты времени, в которое должна быть произведена обработка территории. В блок сравнения 141 поступает код номера транспортного средства, которое должно обрабатывать эту территорию, в блок 143 сравнения координат поступают отсчеты координат, соответствующие координатам территории обработки, из первого блока памяти 11 из регистров 111- 113 на другие входы блоков 141 - 143 сравнения соответственно поступают коды данного транспортного средства, от которого получено сообщение: код номера, код времени сообщения и координаты местоположения. При этом код сообщения о номере может совпасть или не совпасть с кодом номера, поступившего из блока 13, код времени передачи сообщения может совпасть или не совпасть с одним из отсчетов кода времени, поступившего из блока 13 памяти, координаты местоположения транспортного средства также могут совпасть или не совпасть с одним из отсчетов координат указанной территории обработки, данные сравнения с выходов блоков 141 - 143 поступают на входы устройства 19 формирования данных по обработке. К данному устройству подключен также выход регистра 114 сигналов контроля о состоянии телеметрических датчиков, в том числе исполнительного механизма посыпки или разбрызгивания, и выход блока 18 формирования сообщения транспортного средства, в котором представлено сообщение транспортного средства в виде кода номера, кода времени передачи сообщения.
В устройстве 19 формируют код обработки данной территории с привязкой сообщений о транспортном средстве, этот код передают в дешифратор 20, который в случае наличия, по крайней мере, одного сигнала о несовпадении заданных и текущих кодов передает их в блок 212 сигнализации этого состояния, который может быть отдельным блоком или является элементом блока отображения 17. Дешифратор 20 предназначен для дешифрации сформированного устройством 19 кода данных обработки и передачи этих данных в контроллер (не показан), который управляет работой блока 17 отображения.
Кроме того, в системе предусмотрен режим управления работой обработки территории, производимой транспортным средством с диспетчерского пункта. Для этого система содержит блок 23 ввода команд управления, который может быть связан с устройством 19, а может быть автономным блоком ввода данных управления, управляемым оператором. Блок 23 соединен с устройством 9 приема и передачи данных для передачи команд на транспортное средство. На транспортном средстве устройство 8 принимает команды управления и передает их в блок 22 управления транспортным средством. Блок 22, в свою очередь, формирует команды и передает их на блоки 1, 2, 3, 4 и 6. Блок 22 управления выполнен с возможностью управлять исполнительным механизмом, в частности исполнительным механизмом разбрызгивания или распыления реагента, установленным на транспортном средстве.
Система может обрабатывать как отдельные территории, так и участки улиц, проездов и т.п.
При этом в случае уборки, обработки и т.п. участков улиц на специализированный автотранспорт (поливомоечные, подметальные) устанавливается оборудование, представленное на фиг. 1, на транспортном средстве устанавливают такие же средства, как и при обработке территорий: приемник 1 GSP-сигналов местоположения, счетчик 3 текущего времени, блок 2 формирования кода номера транспортного средства, блок 4 формирования сигналов контроля с блоком 5 телеметрических датчиков, связанных с исполнительными механизмами 6, установленными на транспортном средстве и выполняющими определенные функции: полива, мойки, подметания, разбрызгивания или разбрасывания песка или иных реагентов, применяемых при обработке территорий. Блоки 1 - 4 и 30 соединены с формирователем 7 сообщения о процессе обработки, осуществляемой транспортным средством, выход которого связан с устройством 8 приема-передачи сообщений, блок 5 соединен с выходами исполнительных механизмов 61-6n и подключен к блоку 4.
На транспортном средстве установлен блок 22 управления, вход которого подключен к выходу устройства 8 приема и передачи сообщений, а выходы подключены к управляющим входам соответственно блоков 1-4, 6 и 7, блоки 26, 28, 29 управления исполнительным механизмом дозирования.
Блок 22 может быть выполнен в виде контроллера или микропроцессора. На диспетчерском пункте установлены аналогичные блоки, которые используются при обработке территорий: устройство 9 приема и передачи, связанное с соответствующими селекторами 101 - 104 блока выделения сигналов, выходы которых соединены с соответствующими регистрами 111 - 114 первого блока 11 памяти, выходы регистров 111 - 113 соединены с входами декодера 15, блока 18 формирования о транспортном средстве и блоков 141 - 143 сравнения, блока 14 контроля за процессом обработки, выход регистра 114 соединен с соответствующим входом устройства 19 формирования данных об обработке. Выходы декодера 15 подключены к адресным входам второго блока памяти 13, первый, второй и третий выходы второго блока памяти соединены соответственно с первыми входами соответственно блоков 141 - 143 сравнения, вторые входы которых соединены с выходами соответственно регистров 111 - 113, выходы блоков 141 - 143 сравнения подключены к соответствующим входам устройства 19 формирования данных об обработке. Выход блока сравнения 143 через счетчик 24 и блок 144 сравнения подключен к устройству 19, одни выходы которого подключены к дешифратору 20, второй выход - к блоку 17 отображения, третий к блоку 23 команд управления, связанному с соответствующим входом устройства 9 приема и передачи сообщений. Второй вход блока 144 подключен к четвертому выходу блока 13 памяти.
Алгоритм работы системы при обработке улиц, поливе и подметании в целом соответствует алгоритму работы системы при уборке территорий.
Отличие состоит в следующем (фиг. 3).
Каждый объект обработки: улица, проезд и т.п. разбивается на определенное количество навигационных зон уборки, координаты которых хранятся в блоке 13 памяти вместе с данными о номерах транспортных средств, которые могут обрабатывать эти территории, и временными параметрами обработки. Для простоты - отсчеты координат, формируемые в приемнике 1 на транспортном средстве и хранящие в блоке 13 координаты участков улиц или проездов (территорий), соответствуют одному и тому же значению координаты в радиусе 100 м, участки территорий также разбиваются на те же интервалы, т.е. таким образом, чтобы совпадение координаты месторасположения транспортного средства на одном участке с заданной координатой участка в блоке 13 было один раз, а следующая координата местоположения транспортного средства могла совпасть только на следующем участке.
Для контроля обработки улиц и проездов введен дополнительный параметр контроля, контроль количества обработанных участков. Для этого выход блока 143 для сравнения координат подключен не только непосредственно к устройству 19, но и к счетчику 24, который считает число совпадений координаты местоположения с координатой участка, выход счетчика подключен к первому входу блока 144 сравнения, выход которого подключен к устройству 19 для того, чтобы в формируемые им данные вошли сведения о количестве обработанных зон. Кроме того, на второй вход блока 144 сравнения числа участков обработки на данной улице подают сигнал заданного числа участков на данной улице с четвертого выхода блока 13 памяти. При этом, как было указано выше, сведения о работе исполнительных механизмов поступают из регистра 114 в устройство 19.
Результат анализа в виде итогового отчета представляется руководству предприятия. Далее производится анализ информации о выполнении графиков обработки улиц и проездов каждой машины с учетом подсчета затраченных ресурсов (пробег машины - в км, время работы - в ч, мин, количество затраченного топлива - в л), количество разбросанного реагента.
После обработки всей информации руководству предприятия представляется полный отчет о выполнении технологического цикла обработки улиц и проездов за смену, для подготовки и принятия решений о совершенствовании технологического выполнения работ.
В системе предусмотрен также режим контроля за работой транспортных средств при обработке отдельных территорий или участков улиц, проездов и т.п., при котором используют транспортные средства с исполнительными механизмами, осуществляющими посыпку реагентов, обработку территории различными материалами, в том числе их разбрызгивание и т.п. При этом на диспетчерском пункте контролируют не только местоположение, номер и график работы транспортного средства по обработке определенной территории, но и состояние исполнительных механизмов транспортного средства. Для этого из блока 26 управления исполнительным механизмом, осуществляющим, например, разбрызгивание реагента, поступают сигналы, соответствующие уровню дозирования. Выход блока 26 связан с блоком 30 контроля уровня дозирования, преобразующего сигналы уровня дозирования блока 26 в кодовое сообщение о величине уровня для передачи в формирователь 7, который формирует сообщение об уровне дозирования распыляемого или разбрызгиваемого реагента на данной территории данным транспортным средством в соответствующий момент времени. Это сообщение передают посредством устройства 8 на устройство приема и передачи 9, установленное на диспетчерском пункте.
Как было указано выше, на диспетчерском пункте выделяют в блоке 10 кодовые сигналы о номере транспортного средства, времени передачи сообщения, местоположении транспортного средства и сообщение о состоянии исполнительных механизмов, в частности, об уровне дозирования реагента на данной территории. Этот сигнал поступает через регистр 114 непосредственно в устройство 19 формирования данных, которое формирует определенное сообщение о данном транспортном средстве, это сообщение через дешифратор 20 подают на блок сигнализации 212, индицирующий уровень дозирования реагента на данной территории, а также эти данные могут быть поданы на блок 17 отображения, где на карте отображены маршруты работы транспортных средств на территории с координатами местоположения данного транспортного средства и информации о величине дозирования на данной территории. Оператор принимает решение о необходимости, например, уменьшить или увеличить уровень дозирования реагента. Для этого он вводит в блок 23 ввода команду управления, например, о увеличении уровня дозирования до 50 г на м2 при обработке данной территории данным транспортным средством. Через блок 23 ввода команд управления это сообщение поступает в устройство 9, а затем в канал связи, из которого в устройство 8 приема и передачи сообщения данного транспортного средства (фиг. 1). Устройство 8 передает эту команду в блок 22 управления, выход которого соединен с блоком 29 передачи сигнала управления уровнем дозирования с диспетчерского пункта, сигнал управления поступает в блок 26 управления уровнем дозирования исполнительного механизма.
При этом команда управления, поступившая с диспетчерского пункта, является приоритетной по отношению к командам управления уровнем дозирования, поступающим из блока 28 управления уровнем дозирования, осуществляемого водителем.
Для этого при поступлении на блок 29 команды управления с диспетчерского пункта на управляющем выходе появляется сигнал, который подают на управляющий вход блокировки прохождения команд из блока 28. Т.о., команда об изменении значения уровня дозирования поступает в блок 26 управления, который задает уровень дозирования исполнительному механизму. Поскольку информационный выход блока 26 подключен к блоку 30 контроля, то сигналы об уровне дозирования от блока 26 через блок 30, а от него через формирователь 7 сообщения, поступают в устройство 8, а затем через устройство 9 на блок 10 и далее через соответствующие узлы обработки диспетчерского пункта (блоки 11, 14, 18, 19, 20) на блок отображения 17. Оператор имеет возможность наблюдать и управлять процессом обработки территорий и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОИЗВОДСТВОМ РАБОТ ПО УБОРКЕ ТЕРРИТОРИЙ | 2000 |
|
RU2173885C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2001 |
|
RU2174923C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |
| БОРТОВОЙ КОМПЛЕКС ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2004 |
|
RU2280899C2 |
| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕДОЗВОЛЕННОГО ИСПОЛЬЗОВАНИЯ ИЛИ КРАЖИ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2357880C1 |
Система относится к средствам реализации производственных процессов, обеспечивающих обработку территорий и постоянный контроль за указанными процессами. Техническим результатом является обеспечение контроля транспортных средств, используемых при обработке территорий, и управление средствами в случае необходимости с диспетчерского пункта. Технический результат достигается тем, что система содержит на транспортном средстве аппаратуру формирования и передачи сообщений о работе транспортного средства и определения его координат, а на диспетчерском пункте аппаратуру для выделения сообщений с транспортных средств и сравнения полученных данных с заданными параметрами и передачи команд управления с диспетчерского пункта при необходимости. 4 з. п. ф-лы, 3 ил.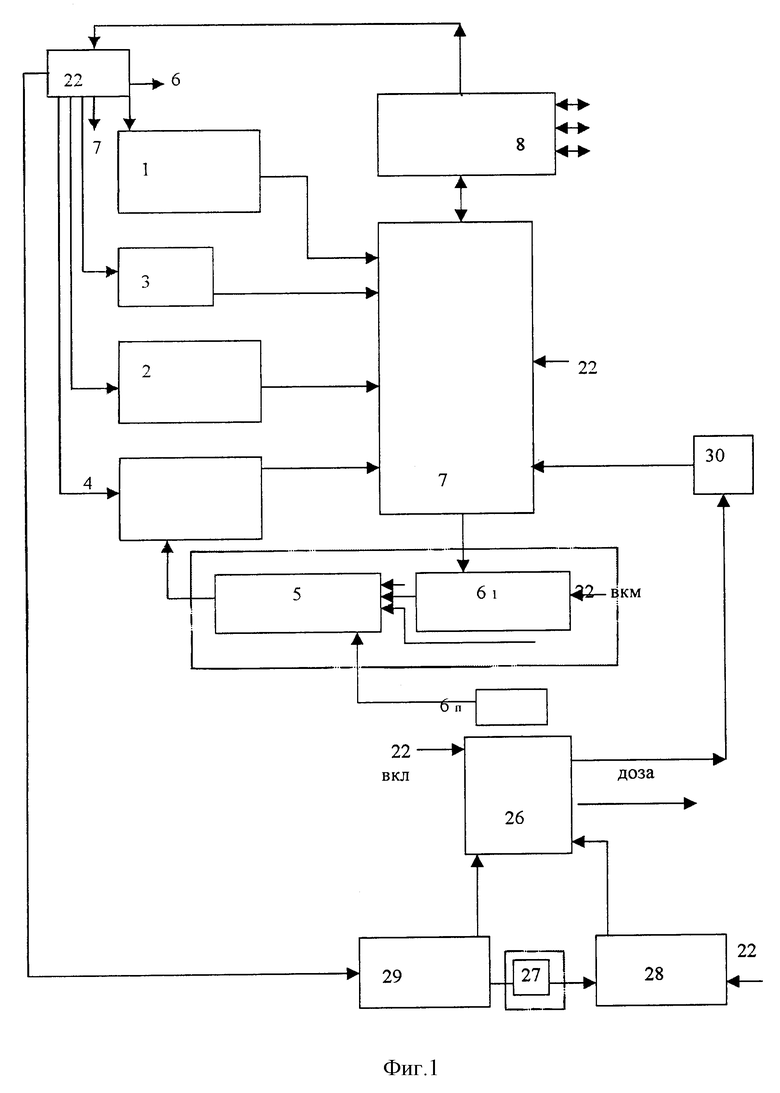
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Устройство для контроля рейсов карьерных автосамосвалов с тяговым электроприводом | 1984 |
|
SU1262548A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| ПОЛУАВТОМАТ ДЛЯ НАМОТКИ ПРОВОЛОЧНЫХ РЕЗИСТОРОВ | 0 |
|
SU249487A1 |
| ТЯНУЩЕЕ ОТРЕЗНОЕ УСТРОЙСТВО | 0 |
|
SU292811A1 |
| US 5933100 A, 03.08.1999. | |||

