ции, которые запоминают, а во время определения веса произвольных грузов непрерывно контролируют положение ковша, считывают из памяти яначе ния безразмерной функции обобщенных координат и функции зависимости измерительного параметра от координат ковша, которые используют для вычисления веса по текущему значению изме рительного параметра. В устройстве
программируемый контроллер 5 на основе информации от датчика 1 измерительного параметров и датчиков 3, 4 обоб- , щенных координат ковша управляет работой запоминающего блока 7, блока 6 контроля сканирования и вычислителя 2 веса груза,, Блок 6 сканирования содержит мнемотабло, по которому про- ю изводится контроль за положением ковша „ 2 Со и 2 з.п. ф-лы, 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
| СПОСОБ И СИСТЕМА ДЛЯ АКТИВНОГО ВЗВЕШИВАНИЯ ГРУЗА ДЛЯ ГОРНОПРОХОДЧЕСКОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2652593C1 |
| Способ поверки стрелочного измерительного прибора и устройство для его осуществления | 1989 |
|
SU1753432A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Дефектоскоп для сканирующего электромагнитного контроля | 1986 |
|
SU1379713A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫСОКОАДАПТИВНЫМ АВТОНОМНЫМ МОБИЛЬНЫМ РОБОТОМ | 2019 |
|
RU2705049C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДВАРИТЕЛЬНОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА ДЛЯ КАРЬЕРНОГО ЭКСКАВАТОРНОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2633426C2 |
| УПРАВЛЕНИЕ ПРИСПОСОБЛЕНИЕМ ДЛЯ ЗЕМЛЕРОЙНЫХ РАБОТ ВДОЛЬ ПУТИ ИЛИ ТРАЕКТОРИИ | 2016 |
|
RU2705436C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2016 |
|
RU2623831C1 |
Изобретение относится к весоизмерительной технике и позволяет поf Сканирование , Запись ППЗУ 20® й азвысить точность измерения и расширить область использования. Согласно способу предварительно сканируют порожним рабочим органом, например ковшом экскаватора, область его возможных положений при переносах между зонами копания и разгрузки. В каждой точке сканирования измеряют и запоминают значения измерительного параметра и обобщенных координат. Затем по тому же закону сканируют область возможных положений ковша с контрольным грузом и в тех же точках считывают значения измерительного параметра н вычисляют значения безразмерной функции обобщенных координат, которые запоминают. Для каждого участка сканирования определяют средние значения измерительного параметра и безразмерной функ&звешиВание ,. % (Л с % со ьэ СО со
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точ- ности и расширение области применения.
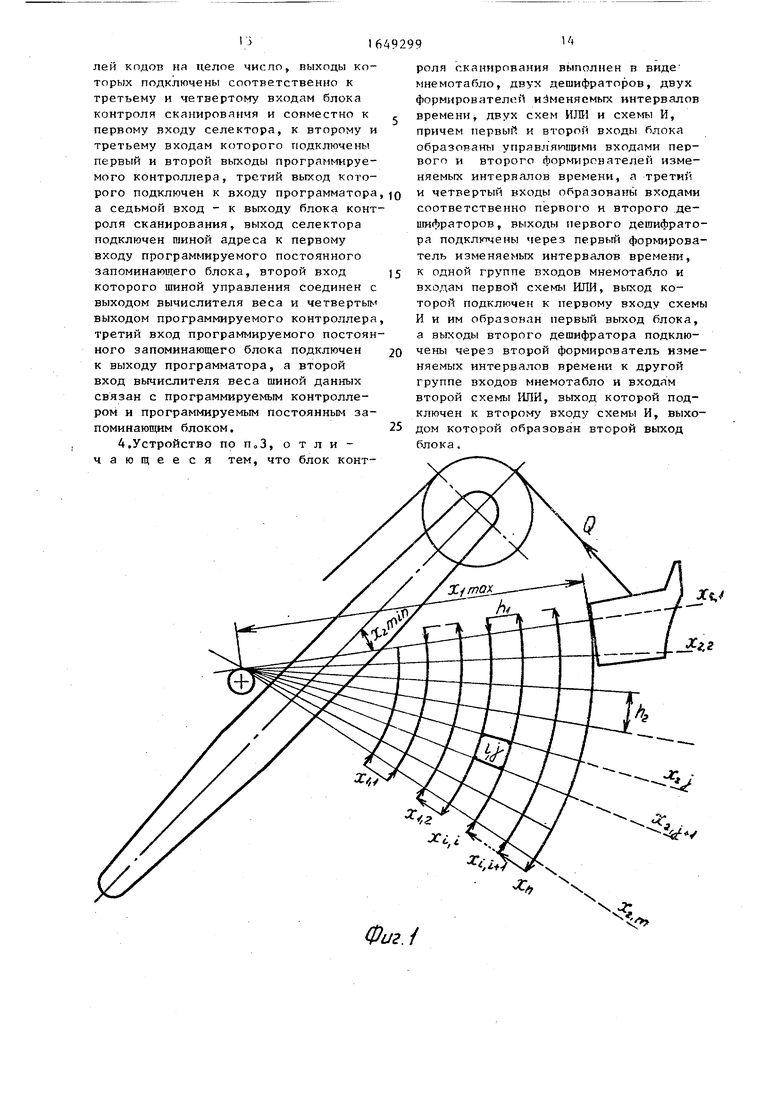
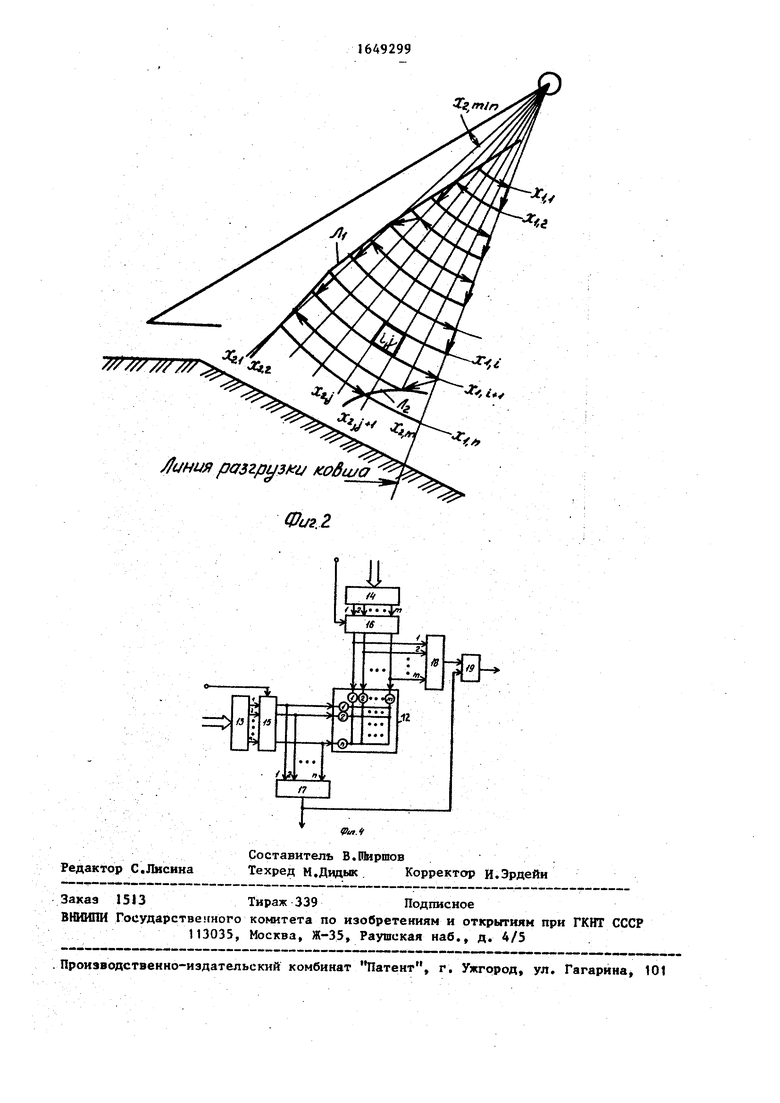
На фиг.1 изображена схема сканирования областей возможных положений ковша экскаватора с прямой механи- ческой лопатой; на фиг02 - то же, для драглайна; на фиг.З - структурная схема устройства для определения веса перемещаемого груза; на фиг.4 - структурная схема блока конт- роля сканирования,,
Способ определения веса перемещаемого груза заключается в следующем.
Производят измерения обобщенных координат рабочего органа с грузом в вертикальной плоскости и измерительного параметра, по результатам которых вычисляют искомый вес, умножая безразмерную функцию обобщенных коор
динат рабочего органа на разность текущего статического значения измерительного параметра и соответствующего текущим обобщенным координатам значения функции, представляющей в статике зависимость измерительного пара- 45 метра от обобщенных координат рабочего органа без груза, предварительно сканируют.рабочим органом область- его возможных положений без груза,
затем по тому же закону - с контрольным грузом. При сканировании без груза измеряют и запоминают значения измерительного параметра вдоль каждой из траекторий перемещения рабочего органа через расстояния, равные шагу дискретизации, а во время сканирования с контрольным грузом вдоль тех же траекторий с прежним шагом измеряют значения измерительного пара0
5 о
5
0
5
0
5
метра и в тех же точках траекторий вычисляют и запоминают значения безразмерной функции обобщенных координат рабочего органа в виде частного от деления веса контрольного груза на разность значений измерительного параметра, найденных в одноименных точках соответственно при втором и первом сканированиях. Затем для каждого из элементарных участков области возможных положений рабочего органа, ограниченных сканирующими траекториями и линиями, соединяющими точки одноименных шагов дискретизации на траекториях, определяют по результатам двух сканирований средние на участке значения измерительного параметра при рабочем органе без груза и безразмерной функции обобщенных координат, которые запоминают по адресам, однозначно связанным с номерами элементарных участков, а затем во время определения веса произвольных грузов непрерывно контролируют положение рабочего органа относительно элементарных участков области возможных положений и по номерам элементарных участков, через которые при перемещениях проходит рабочий орган с грузом, считывают из памяти средние на участке значения безразмерной функции обобщенных координат и функции, представляющей в статике зависимость измерительного параметра от обобщенных координат рабочего органа без груза, использующиеся при вычислении веса0 Кроме того, значения шагов дискретизации между и вдоль сканирующих траекторий выбирают так, что относительное приращение измерительного параметра на каждом шаге не превышает заданного,
10
51649299
Чтобы определять веса перемещаемых экскаваторами, погрузчиками или иными объектами грузов по предлагаемому способу, нужно предварительно знать диапазоны измерений обобщенных координат, области возможных положений их рабочих органов, а также диапазоны изменений измерительных параметров при переносах грузов. Эти данные имеются в проектной или конструкторской документации на объект. Кроме того, их получают и при проектировании датчиков координат рабочего органа и измерительного параметра, необходимых для любых средств определения веса перемещаемого груза. На основании исходных данных и требований к точности аппроксимации зависимости измерительного параметра от ; координат fi0(x,,, xЈ) определяют и
15
20
задают значения шага h. между сканирующими траекториями по координате Ху, и шага h по координате Xj вдоль сканирующей траектории так, чтобы относительное приращение измерительного параметра на каждом шаге не превышало заданного,
Чтобы определить вес горной массы, перемещаемой в ковше экскаватора прямой механической лопаты, предварительно сканируют порожним ковшом область его возможных положений при переносах между зонами копания и разгрузки. Для этого выводят порожний ковш в начальную точку с координатами ( xZMQicc в КОТОРОЙ рукоять выдвинута до упора и ковш максимально поднят. В этой точке считают и запоминают значения измерительного параметра и обобщенных координат. Далее при фиксированной координате х. х 1П последовательно опускают ковш приводом подъемной лебедки С шагом h в точке
(х|и хЈц) Х2{)
25
Х2п)
Затем втягивают рукоять на величину hj, вновь затормаживают ее и выво- дят приводом подъема ковш в точку
(xit,-i х 2w) и Далее с шагом Ь2 последовательно приводом подъема выводят ковш в точке (х., , х.),...
( XjZ.j ) X2l
Затем вновь манипулируют приводом напора и подъема и так проходят всю область возможных положений ков- шов в соответствии со схемой, представленной на dmr.lo
( з 0 ц в в те л к ч в р
К
зн ще
F(
30
к д о о р од т т уч м н фо
35
са
4Q ми во ны по ме
45 по уч ни сч ке
50 об ст ри ко но
55 че .вы со
5
0
В каждой из точек дискретизации (х ,{ tx2j) считывают и запоминают значения измерительного параметра 00(,х2 )н координат точек. С целью исключения динамических помех в измерительном параметре ковш на время считывания останавливают. Затем по тому же закону сканируют область возможных положений ковша с контрольным грузом. BiTex же точках, что и при первом сканировании считывают значения измерительного параметра ,1 ,хг,), соответствующие
КОНТРОЛЬНОМУ Грузу Скгри ВЫЧИСЛЯЮТ
значения безразмерной функции обобщенных координат по формуле
Qk lFTx7p-Qo x1,
F(x,; ,x2j)
которые также запоминают. Для каждого из элементарных участков (i,j) области возможных положений ковша, ограниченных сканирующими траекториями и линиями, соединяющими точки одноименных шагов дискретизации на траекториях, определяют по результатам двух сканирований: среднее на участке значения измерительного параметра при порожнем ковше и безразмерной функции обобщенных координат по формулам: ;,., j +
F (i,j)
CFI flL bIxiKux.2sl
. . 4
141 И (X.iK..
Эти значения запоминают по адресам, однозначно связанным с номерами элементарных участков, а затем во время определения веса произвольных грузов непрерывно контролируют положение ковша и относительно элементарных участков области возможных
положений, и по номерам элементарных участков, через которые при перемещениях проходит рабочий орган с грузом, считывают из памяти средние на участке значения безразмерной функции
обобщенных координат и функции, представляющей в статике зависимость измерительного параметра от обобщенных координат ковша без груза, непрерывно измеряют текущие статические значения измерительного параметра и .вычисляют вес груза по формуле Grp- F(i,j)Q - Qe(i,jrj . Использование предлагаемого способа и устройства определения веса
перемещаемого груза на экскаваторе- драглайне аналогично применению на экскаваторе-механической лопате У драглайна другая область возможных .положений ковша, ограниченная линией разгрузки, верхней 1 и нижней 12 предельными траекториями ковша при его переносах. Сканирование области осуществляют, манипулируя приводами подъема и тяги согласно схеме, представленной на фиг.2„
Устройство для определения веса перемещаемого груза содержит (фиг.З) датчик 1 измерительного параметра, 1 подключенный к первому входу вычислителя 2 веса груза, первый и второй датчики 3 и 4 обобщенных координат рабочего органа в вертикальной плоскости, программируемый контроллер 5, блок 6 контроля сканирования, программируемый постоянный запоминающий блок 7, программатор 8, селектор 9 шин адреса, первый и второй делители 10 и 11 кодов на целое число„
Блок 6 контроля сканирования (фиг„4) содержит мнемотабло 12, первый и второй дешифраторы 13 и 14, первый и второй формирователи 4 5 и 16, изменяемых интервалов времени, схемы ИЛИ 17, 18 и схему И 19.
Кроме того, устройство содержит задатчик 20 режима работы контроллера 5 - сканирование или запись, задатчик 21 шагов (Ц) дискретизации между сканирующими траекториями и задатчик 22 шагов (hg) дискретизации вдоль сканирующих траекторий„ Мнемотабло 12 содержит п и т источников света
Устройство для определения веса перемещаемого груза работает следующим образом„
В режиме Обучение оператор за- датчиками 21 к 22 задает контроллеру 5 значения шагов дискретизации h и hj,, подает команду Сканирование, кторая инициирует вызов в контроллере 5 программы обработки данных во время сканирования. После вывода рабоче-50 натУ х и переходит на следующую
сканирующую траекторию. При этом свечивается вторая или (п-1) гори тальная линия на мнемотабло 12 и вновь формируется сигнал Фиксиро „ При попадании рабочего орган точку дискретизации на сканирующе траектории высвечивается соответс щая вертикальная линия мнемотабло формируется сигнал Фиксировать х
го органа в точку, соответствующую граничным значениям координат х и х„ на допустимых интервалах их изменения Дх ( и Дх , ее принимают за начальную. При этом оператор подает на входы аналого-цифровых преобразователей датчиков 3 и 4 смещение таким образом, чтобы на первом и втором входах блока 6 контроля сканирования
5
Q
0 5
0
5 0
5 были логические единицы. Такое смещение осуществляется с помощью регулируемых потенциометров (не показаны). В начальной точке в зависимости от того, какие значения координат ;,. и соответствуют х0
х ей
хг,иц« или
Ц«инипи х.мв)сЬ . ), появляются сигналы
на первом или п выходах дешифратора 13 и формирователя 15, первом или m-ом выходах дешифратора 14 и формирователя 16. На мнемотабло 12 высвечиваются соответствующие горизонтальная и вертикальная линии, обозначающие начальную траекторию сканирования и точку на ней. На первом и втором выходах блока 6 контроля сканирования формируются сигналы Фиксировать х., Фиксировать Xg, которые воздействуют на устройство управления приводами рабочего органа и фиксируют его в начальной точке. При этом сигнал иксироватъ х подается так же на седьмой вход контроллера 5 и служит для него командой вызова подпрограммы считывания кодов датчиков 1, 3, 4 о После каждого поступления на седьмой вход единичного сигнала контроллер 5 считывает и запоминает в своем оперативном запоминающем устройстве коды датчиков 1, 3, 4. Затем оператор растормаживает привод, изменяющий координату х , и перемещает рабочий орган в следующую точку начальной траектории сканирования, соответствующую х1(, или х4м , При этот свечение первой или n-ой горизонтальной линии на мнемотабло 12 и сигнал Фиксировать х сохраняются, а сигнал Фиксировать х- и свечение первой или га-ой вертикальной линии сначала исчезают, а затем, при попадании рабочего органа в следующую точку на траектории, восстанавливаются. После прохождения всех точек на начальной сканирующей траектории, в которых контроллером 5 считаны коды датчиков 1 , 3, 4, оператор уменьшает (или увеличивает) на шаг h координатУ х и переходит на следующую
сканирующую траекторию. При этом подсвечивается вторая или (п-1) горизонтальная линия на мнемотабло 12 и вновь формируется сигнал Фиксировать При попадании рабочего органа в точку дискретизации на сканирующей траектории высвечивается соответствующая вертикальная линия мнемотабло 12 формируется сигнал Фиксировать хг
5
и контроллером 5 считываются очередные значения сигналов датчиков 1 , 3, 4. Процесс повторяется для всех точек на всех сканирующих траекториях„ Далее повторяются процессы сканирования и считывания сигналов датчиков 1, 3, 4 при нагружении рабочего органа контрольным грузом. Блок 6 контроля- сканирования обеспечивает выпол- IQ нение второго сканирования по тем же траекториям и считывание сигналов датчиков 1, 3, 4 в тех же точках, что и при первом сканировании.
лер 5 на первом выходе устанавливает сигнал логической 1 и переключает селектор 9 шин адреса для передачи кодов адресов на шину А с второго выхода контроллера 5. На шине данных д устанавливЈегея записываемое значение функции Q0() или F(i,j), на шине адреса - адрес очередной ячейки памяти; которая программируется. На линиях гаины управления У, определяющих выбор необходимой микросхемы памяти в блоке 7 и разрешение по нх выходам, контроллер 5 устанавливает После выполнения второго сканиро- 15 сигналы логической 1, а выходом 3 вания контроллер 5 по подпрограмме включает программатор 8, который непоследовательно для каждой из точек дает на соответствующий вход про- (х,1, x2j), координаты которых он граммируемой микросхемы блока 7 запомнил при первом сканировании, импульс согласно временной днаграм- вьгчисляет значения безразмерной ме программирования. После завергае- ции координат F(x, ). После ния автоматизированного программи- выполнения этой подпрограммы контрол- рования постоянного запоминающего лер 5 переходит к выполнению подпро- блока 7 режим обучения заканчивается, граммы определения средних на элемен- и устройство готово для взвешиваний тарных участках значений функций 25 произвольных грузов,.
Во время взвешивания произвольного груза оператором или автоматическим устройством на вход вычислителя 2 подается сигнал Взвешивание, ко- 30 торый вызывает к исполнению программу измерений. В соответствии с ней вычислитель 2 считывает поступающий на первый вход с датчика 1 код текущего значения измерительного параметния функций Q0(i,j) и F(i,j)0 Адре- 35 ра- Q Затем по линиям шины управле- са определяются следующим образом: последовательно считываются из оперативной памяти значения и делятся на шаг hj (если шаги п,2 , Ь2 2 , то деление осуществляется простым сдвигом вправо кодов х1( и x/jtj na k разрядов). Аналогичные операции осуществляютсяся и с значениями Xgj. Пары полученных значений
QoCijJ) F(i.j) как средних арифметических их значений в точках (х.-, x2j), (х,, x2j), ( хг + ), (x {t1 , ,).
Затем контроллер 5 переходит к выполнению подпрограммы определения адресов программируемого постоянного запоминающего блока 7, по которым записываются и хранятся средние значения У посылает в блок 7 сигналы выбора необходимой микросхемы памяти и разрешения ее выхода и считывает значение функции Q0(i,j), соответст- 40 вукщее текущему положению рабочего органа относительно элементарных участков (i,j), области его возможных положений. Адрес ячейки памяти,
в которой хранится значение О (i,j),
п п
и х2: /h объединяются и образуют адре-45 формируется на адресной тине А са, которые записываются в оператив- из кодов текущих координат датчиков
3,4с помощью делителей 10 и 11 кодов путем объединения их выходов в
адресную шину. Код этой шины через
ную память контроллера 5. Эти адреса совпадают с теми адресами, которые получаются на шине, полученной в результате объединения выходов делите- 50 селектор 9 (на управляющем входе 1 лей 10 и 11 кодов.которой имеется логический 0) поступает на шину адреса блока 1, Далее
Затем контроллер 5 с помощью про- вычислитель 2 таким же образом счн- грамматора 8 осуществляет программнро- тывает из второй микросхемы блока вание постоянного запоминающего бло- „ 7 значение функции F(i,j). Затем ка 7, куда при этом записываются по ч
адресам (,; ) средние значения сначала функции Qe() затем функции F(i,j). При этом контролвычисляет разность Q - Q0(i,j) и, умножая ее на значение функции F() определяет искомый вес груза-
лер 5 на первом выходе устанавливает сигнал логической 1 и переключает селектор 9 шин адреса для передачи кодов адресов на шину А с второго выхода контроллера 5. На шине данных д устанавливЈегея записываемое значение функции Q0() или F(i,j), на шине адреса - адрес очередной ячейки памяти; которая программируется. На линиях гаины управления У, определяющих выбор необходимой микросхемы памяти в блоке 7 и разрешение по нх выра- Q Затем по линиям шины управле-
ния У посылает в блок 7 сигналы выбора необходимой микросхемы памяти и разрешения ее выхода и считывает значение функции Q0(i,j), соответст- вукщее текущему положению рабочего органа относительно элементарных участков (i,j), области его возможных положений. Адрес ячейки памяти,
в которой хранится значение О (i,j),
п п
формируется на адресной тине А из кодов текущих координат датчиков
адресную шину. Код этой шины через
селектор 9 (на управляющем входе 1 которой имеется логический 0) посту
вычислитель 2 таким же образом счн тывает из второй микросхемы блока 7 значение функции F(i,j). Затем ч
вычисляет разность Q - Q0(i,j) и, умножая ее на значение функции F() определяет искомый вес груза-
11
Форму л а изобретения
ходит рабочий орган с грузом, считывают из памяти средние на участке значения безразмерной функции обобщенных координат и функции, представляющий в статике зависимость измерительного параметра от обобщенных координат рабочего органа без груза, использующихся при вычислении веса.
JQ 2.Способ по п.1, отличающийся тем, что значения шагов дискретизации между и вдоль сканирующих траекторий выбирают такими, чтобы относительное приращение измери15 тельного параметра на каждом шаге не превышало заданного значения.
веса, и первый и второй датчики обобщенных координат рабочего орган в вертикальной плоскости, отличающееся тем, что, с целью
торий перемещения рабочего органа через расстояния, равные шагу дискретизации, а во время сканирования с контрольным грузом вдоль тех же траекторий с прежним шагом измеряют значе- 30 Р°й делители кодов на целое число,
ния измерительного параметра и в тех же точках траекторий вычисляют и запоминают значения безразмерной функции обобщенных координат рабочего органа в виде частного от деления веса контрольного груза на разность значений измерительного параметра, найденных в одноименных точках соответственно при втором и первом сканировании затем для каждого из элементарных участков области возможных положений рабочего органа, ограниченных сканирующими траекториями и линиями, соединяющими точки одноименных шагов дискретизации на траекториях, определяют по результатам двух сканирований средние на участке значения измерительного параметра при рабочем органе без груза и безразмерной функции обобщенных координат, которые запоминают по адресам, однознач- но связанным с номерами элементарных участков, а затем во время определения веса произвольных грузов непрерывно контролируют положение, рабочего , рующими траекториями и вдоль сканиоргана относительно элементарных участков области возможных положений и по номерам элементарныхучастков, через которые при перемещениях прорующих траекторий подключены соответ ственно к пятому и шестому входам программируемого контроллера и вторым входам первого и второго делитеченный к первому входу вычислителя повышения точности, в него введены
веса, и первый и второй датчики обобщенных координат рабочего органа в вертикальной плоскости, отличающееся тем, что, с целью
программируемый контроллер, блок контроля сканирования, программируемый постоянный запоминающий блок селектор, программатор, первый и вто5
0
задатчик режимов работы программируемого контроллера, задатчик шагов дискретизации между сканирующими траекториями и задатчик шагов дискретизации вдоль сканирующих траекторий, причем датчик измерительного параметра подключен к первому входу программируемого контроллера, первый датчик обобщенных координат рабочего органа в вертикальной плоскости подключен к второму входу программируемого контроллера и первым входам блока контроля сканирования и первого делителя кодов на целое число, второй 5 датчик обобщенных координат рабочего органа в вертикальной плоскости подключен к третьему входу программируемого контроллера, второму входу блока контроля сканирования и к первому входу второго делителя кодов на целое число, задатчик режима работы программируемого контроллера подключен к его четвертому входу, задатчи- ки шагов дискретизации между скани0
рующих траекторий подключены соответственно к пятому и шестому входам программируемого контроллера и вторым входам первого и второго делителеи кодов на целое чиспо, выходы которых подключены соответственно к третьему и четвертому входам блока контроля сканирования и совместно к первому входу селектора, к второму и третьему входам которого подключены первый и второй выходы программируемого контроллера, третий выход которого подключен к входу программатора, а седьмой вход - к выходу блока контроля сканирования, выход селектора подключен шиной адреса к первому входу программируемого постоянного запоминающего блока, второй вход которого шиной управления соединен с выходом вычислителя веса и четвертым выходом программируемого контроллера, третий вход программируемого постоянного запоминающего блока подключен к выходу программатора, а второй вход вычислителя веса шиной данных связан с программируемым контроллером и программируемым постоянным запоминающим блоком.
Фиг.1
Линия разгрузки ковшо
Фиг. 2
%гт/п
/
«
11
| Горная электромеханика и автоматика: РеспубЛо межведомств, науч.- техн.сборник | |||
| Киев: Техника, 4986, № 48 с«45 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
