Изобретение относится к балансировочной технике и может быть исполь зовано в балансировочных станках и станках-автоматах при балансировке роторов в косоугольных системах координат с разложением вектора дисбаланса на две или три составляющие.
Цель изобретения - автоматизация процесса измерения составляющих дисбаланса путем автоматического выбора вариантов измерения и пересчета мест коррекции при невозможности устранения дисбаланса по одной оси коррекции.
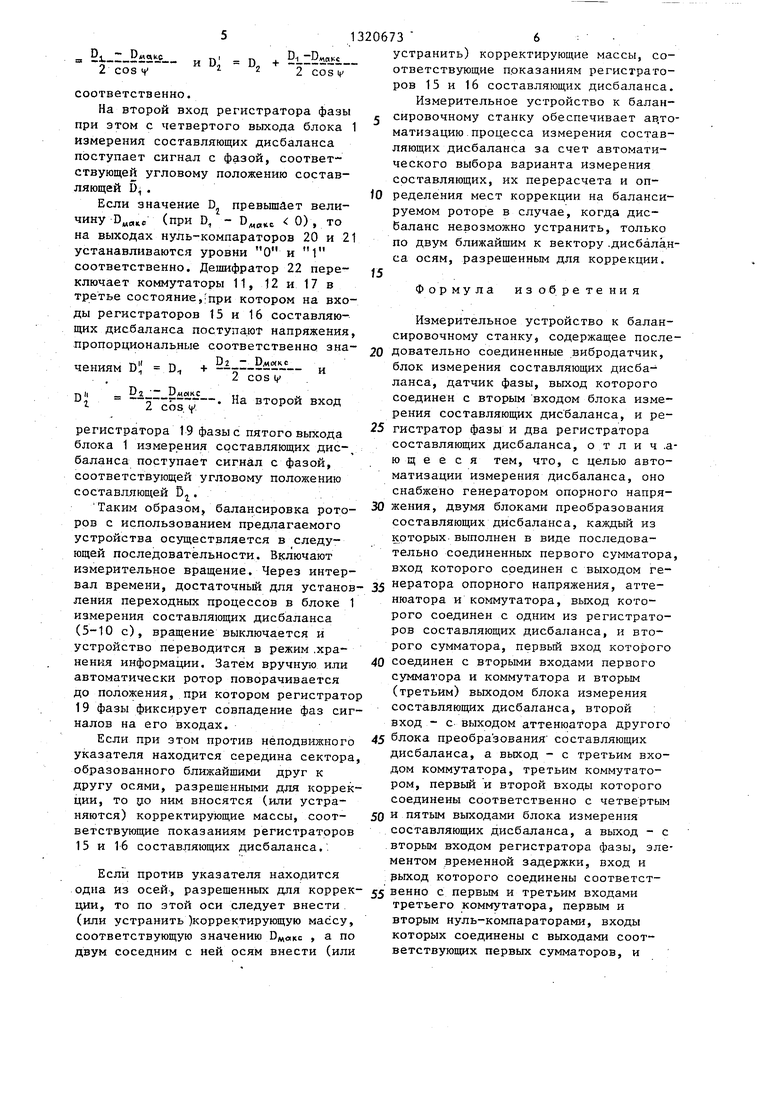
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2,- векторная диаграмма, нанесенная на торец балансируемого ротора.
17, два нуль-компа.ратора 20 и 21, входы которых соединены соответственно с выходами первых сумматоров 7 и 8 блоков 5 и 6 преобразования сос5 тавляющих дисбаланса, и дешифратор 22 входы которого соединены с выходами нуль-компараторов 20 и 21, а выход - с управляющими входами коммутаторов 11, 12 и 17.
10 Устройство работает.следующим образом.
Фильтрация сигнала дисбаланса, выделяющегося на выходе вибродатчика 2 при вращении балансируемого ротора
5 (не показан), и определение двух составляющих D, и Г) дисбаланса D осуществляются блоком 1 измерения составляющих дисбаланса. Для этого на его второй вход поступает выходной
Измерительное устройство к балан- 20 сигнал датчика 3 фазы, ротор которо- сировочному станку содержит блок 1 го кинематически связан с балансиру- измерения составляющих дисбаланса, емым ротором. Датчик 3 фазы питается соединенный е его первым входом виб- двух- или трехфазным сигналом, кото- родатчик 2, датчик 3 фазы, вход кото- .рьш вырабатывается входящим в-состав рого связан с первым выходом блока 1 блока 1 измерения составляющих дисизмерения составляющих дисбаланса, а выход - с вторым входом последнего, генератор 4 опорного напряжения, два блока 5 и 6 преобразования составляющих дисбаланса, каждый из которых выполнен в виде последовательно соединенных сумматора 7(8), первый вход
баланса генератором несущей частоты; Фаза выходного сигнала датчика 3 фазы несет информацию о текущем угловом положении балансируемого ротора, 30 что используется блоком 1 измерения составляющих дисбаланса длл выделения опорного сигнала с частотой вращения
которого подключен к генератору 4 при фильтрации сигнала вибрЬдатчика 2 опорного напряжения, аттенюатора (кроме того, информация о текущем угло- 9(10) и коммутатора 11(12) и второго вом положении ротора используется при сумматора 13(14), первьй вход которо- отыскании составляющих дисбаланса, для го связан с соединенными между собой чего выходной сигнал датчика 3 фазы пос- вторыми входами коммутатора 11(12) и тупает также на вход регистратора фа- первого сумматора 7(8) и вторым (тре- зы).
тьим) выходом блока 1 измерения сое- 40 Через интервал времени, достаточ- тавляющих дисбаланса, второй вход - ный для установления переходных процессов, блок 1 измерения составляющих дисбаланса переключается в режим хранения информации и на втором и 45 третьем его выходах устанавливаются напряжения, пропорциональные соответс выходом аттенюатора 10(9) другого блока 6(5) преобразования составляющих дисбаланса, а выход - с третьим входом коммутатора 11(12), два регистратора 15 и 16 составляющих дисбаланса, соединенные соответственно с выходами коммутаторов 11 и 12, третий коммутатор 17, первьй и второй
ственно значениям D, и D. Эти напряжения могут использоваться для определения корректирующих масс, ковходы которого связаны соответствен- 50 торые необходимо внести (или устра- но с четвертым и пятым выходами бло- нить) по осям коррекции, совпадающим
ка 1 измерения составляющих дисбаланса, элемент 18 временной задержки, вход которого соединен с первым, а выход - с третьим входами третьего коммутатора 17, регистратор 19 фазы, первый и второй входы которого подключены соответственно к выходам датчика 3 фазы и третьего коммутатора
17, два нуль-компа.ратора 20 и 21, входы которых соединены соответственно с выходами первых сумматоров 7 и 8 блоков 5 и 6 преобразования составляющих дисбаланса, и дешифратор 22, входы которого соединены с выходами нуль-компараторов 20 и 21, а выход - с управляющими входами коммутаторов 11, 12 и 17.
Устройство работает.следующим образом.
Фильтрация сигнала дисбаланса, выделяющегося на выходе вибродатчика 2 при вращении балансируемого ротора
(не показан), и определение двух составляющих D, и Г) дисбаланса D осуществляются блоком 1 измерения составляющих дисбаланса. Для этого на его второй вход поступает выходной
баланса генератором несущей частоты; Фаза выходного сигнала датчика 3 фазы несет информацию о текущем угловом положении балансируемого ротора, 30 что используется блоком 1 измерения составляющих дисбаланса длл выделения опорного сигнала с частотой вращения
с составляющими D., И В. Информация об угловом положении осей коррекции на роторе содержится в фазе импульс- 55 ных сигналов несущей частоты на четвертом и пятом выходах блока 1 измерения составляющих дисбаланса. Фаза выходного сигнала датчика 3 фазы совпадает с фазой этих сигналов, если
против неподвижного указателя, укрепленного на станине станка (не показан), находится соответствующая составляющая D или D ось коррекции.
На векторной диаграмме, приведен- ной на фиг. 2, обозначены оси К1тК12, совпадающие с местами на роторе, разрешенными для коррекции, вектор дисбаланса балансируемого ротора Dp, вектор корректирующего дисбаланса D, который необходимо ввести при балансировке ротора, составляющие D, и D дисбаланса U, измерение которых обеспечивает блок 1 измерения составляющих дисбаланса, составляющие D , t5 , , 1
Dj и ,РД,ЯКС дисбаланса D, измерение которых обеспечивает предлагаемое устройство, угол V между соседними осями К.
Если значение одной из составляю- 20 щих дисбаланса превьшает значение максимального дисбаланса который можно внести (или устранить) по одной оси, то для коррекции дисбаланса балансируемого ротора можно ис- 25 пользовать дополнительную третью ось, ближайшую к оси, совпадающей с большей оставляющей дисбаланса.
На фиг. 2 приведен пример разложения, корректирующего дисбаланса на 30 три составляющие для случая, когда D л,йкс Р этом значение составляющей D , находящейся на дополнительной оси коррекции (ось К2 на
фиг. 2), равно D; Ц-
КГ2
сЪз V значение составляющей по оси
D . i. 2 cos V
35
увеличивается на величину
ся напряжения, D,
2 . co про1то
чениям D
DM«
2- -
COS
D - Ома НС
-« соотв
2 cos If
выходах сумматоров 1 жения, пропорциональ
n l п -1. г. DMOI jj- Uv Г----
2 cos Ч
+ .
2 cos If
Для автоматическог та измерения предназн паратор 20 и 21 и деш равляющий коммутатора
Если значения D
соответс
личины D.,
,то на в
нуль-компараторов 20 ваются уровни О. Пр ции выходных сигналов переключает коммутато в состояние, при кото гистраторов 15 и 16 с баланса с второго и т блока -1 измерения сос ба.ланса поступают нап циональные значениям .ственно, а на второй jj ра 19 фазы с выхода э менной задержки прихо которого сдвинута на сительно фазы сигнала Если значение D п
../ T, DI-DW«KC и становится равным D D +--r--,
а значение составляющей, находящейся на оси К1, равно В„оис
Аналогично рассчитываются значения составляющих, если 0. В этом случае дополнительная составляющая находится на оси, соседней с осью, направление которой совпадает с составляющей D, а ее значение раз Значение сосT li Вг - Вллакс НО D2 .
2 COS v
тавляющей D увеличивается на велиD2 cosy
2 COS V
чину
D, D,
и становится равным
а значение
составляющей по центральной оси равно D
.г
и
(лаке
Расчет значений Dj , осуществляют блоки 5 и 6 преобразования составляющих дисбаланса. Входящие в их состав сумматоры 7 вычисляют разности D D,,
и
и D поступают с генератора 4 опорного напряжения сигнал, пропорциональный значению а на вторые входы соответственно - сигнал, пропорциональный значениям D, и D ходах аттенюаторов 9 и 10,
, , 1
ся напряжения, D,
На вы- учитываю2 . cos V про1торциональные значениям D
и D
D,
DM«KC
2- --±i
COS V
D - Ома НС
-« соответственно, а на
2 cos If
выходах сумматоров 13 и 14 - напря- жения, пропорциональные значениям
n l п -1. г. DMOIIC jj- Uv Г----
2 cos Ч
+ .
2 cos If
Для автоматического выбора варианта измерения предназначены нуль-компаратор 20 и 21 и дешифратор 22, управляющий коммутаторами 11, 12 и 17
Если значения D и D меньше веи Вг
соответственно.
личины D.,
,то на выходах обоих
нуль-компараторов 20 и 21 устанавливаются уровни О. При этой комбинации выходных сигналов дешифратор 22 переключает коммутаторы 11, 12 и 17 в состояние, при котором на входы регистраторов 15 и 16 составляющих дисбаланса с второго и третьего- выходов блока -1 измерения составляющих дис- ба.ланса поступают напряжения, пропорциональные значениям D и 1 соответ- ственно, а на второй вход регистрато- ра 19 фазы с выхода элемента 18 временной задержки приходит сигнал, фаза которого сдвинута на угол относительно фазы сигнала составляющей Dy. Если значение D превьш1ает величину D
jwrtKC
(при D,. - .; 0), то на выходах нуль-компараторов 20 и 21 устанавливаются уровни 1 и О соответственно. Дешифратор 22 при этом переключает коммутаторы 11, 12 и 17 во второе состояние, при котором с аттенюатора 9 и сумматора 14 на входы регистраторов 15 и 16 составляющих дисбаланса поступают напряжения, пропорциональные значениям D,
„ Q. 2 cos у
В„
2i-z2is.f-.
2 cos V
соответственно.
Ha второй вход регистратора фазы при этом с четвертого выхода блока измерения составляющих дисбаланса поступает сигнал с фазой, соответствующей угловому положению составляющей D .
Если значение D превьщает величину (при D, - 0), то
на выходах нуль-компараторов 20 и 21 устанавливаются уровни О и 1 соответственно. Дешифратор 22 переключает коммутаторы 11, 12 и 17 в третье состояние,;при котором на входы регистраторов 15 и 16 составляющих дисбаланса поступают напряжения, пропорциональные соответственно зна22. D««nc
2 cos (f
2i-z 2--IS
2 COS. V
чениям DI, DI +
В
и
На второй вход
регистратора 19 фазы с пятого выхода блока 1 измерения составляющих дис- баланса поступает сигнал с фазой, соответствующей угловому положению составляющей D.
Таким образом, балансировка роторов с использованием предлагаемого устройства осуществляется в следующей последовательности. Включают измерительное вращение. Через интервал времени, достаточньй для установ- 35 ератора опорного напряжения, атте- ления переходных процессов в блоке 1 измерения составляющих дисбаланса (5-10 с), вращение выключается и устройство переводится в режим .хранения информации. Затем вручную или автоматически ротор поворачивается
нюатора и коммутатора, выход которого соединен с одним из регистрато ров составляющих дисбаланса, и второго сумматора, первый вход которог
40 соединен с вторыми входами первого сумматора и коммутатора и вторым (третьим) выходом блока измерения составляющих дисбаланса, второй ; вход - с. выходом аттенюатора другог
19 фазы фиксирует совпадение фаз сигналов на его входах.
Если при зтом против неподвижного указателя находится середина сектора, образованного ближайшими друг к другу осями, разрешенными для коррекции, то цо ним вносятся (или устраняются) корректирующие массы, соответствующие показаниям регистраторов 15 и 16 состав.ляющих дисбаланса..
Если против указателя находится
одна из осей-, разрешенных для коррек- венно с первым и третьим входами ции, то по этой оси следует внести третьего коммутатора, первым и (или устранить )корректирующую массу, вторым нуль-компараторами, входы
соответствующую значению , а по двум соседним с ней осям внести (или
0673 6 :
устранить) корректирующие массы, coответствующие показаниям регистраторов 15 и 16 составляющих дисбаланса. Измерительное устройство к балан- 5 сировочному станку обеспечивает ав.то- матизацию процесса измерения составляющих дисбаланса за счет автоматического выбора варианта измерения составляющих, их перерасчета и оп- 10 ределения мест коррекции на балансируемом роторе в случае, когда дисбаланс невозможно устранить, только по двум ближайшим к вектору .дисбаланса осям, разрешенным для коррекции.
Формула изобретения
Измерительное устройство к балансировочному станку, содержащее послеовательно соединенные вибродатчик, блок измерения составляющих дисбаланса, датчик фазы, выход которого соединен с вторым входом блока измерения составляющих дисбаланса, и регистратор фазы и два регистратора составляющих дисбаланса, от л и ч .a- ю щ е е с я тем, что, с целью автоматизации измерения дисбаланса, оно снабжено генератором опорного напряжения, двумя блоками преобразования составляющих дисбаланса, каждый из которых, выполнен в виде последовательно соединенных первого сумматора, вход которого соединен с выходом ге35 ератора опорного напряжения, атте-
нюатора и коммутатора, выход которого соединен с одним из регистраторов составляющих дисбаланса, и второго сумматора, первый вход которого
40 соединен с вторыми входами первого сумматора и коммутатора и вторым (третьим) выходом блока измерения составляющих дисбаланса, второй ; вход - с. выходом аттенюатора другого
45 блока преобразования составляющих дисбаланса, а выход - с третьим входом коммутатора, третьим коммутатором, первьй и второй входы которого соединены соответственно с четвертым
50 и пятьп выходами блока измерения составляющих дисбаланса, а выход - с вторым входом регистратора фазы, элементом временной задержки, вход и эыход которого соединены соответсткоторых соединены с выходами соответствующих первых сумматоров, и
неиы с выходами нуль-компараторов,
всех коммутаторов.
К2
КЗ
К5
К9
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1259121A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1420418A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
Изобретение относится к балансировочной технике. Цель изобретения - автоматизация процесса измерения составляющих дисбаланса и пересчета мест коррекции при невозможности устранения дисбаланса по одной оси коррекции. Сигнал с вибродатчика 2 через блок 1 измерения составляющих дисбаланса поступает на входы блоков 5 и 6 преобразования составляющих дисбаланса, где осуществляется расчет значений последних. Нуль-компараторы 20 и 21 и дешифратор 22, управляющий коммутаторами 11, 12 и 17, осуществляют выбор ва- рианта измерения и пересчета. 2 ил. СЛ
Редактор А. Огар
Составитель Ю. Круглев
Техред М.Ходанич Корректор А. Зимокосов
Заказ 2650/45
Тираж 776
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
