Изобретение относится к машиностроению и может быть использовано в робототехнике.
Цель изобретения - расширение функциональных возможностей.
На чертеже показан модуль, общий вид.
Модуль содержит корпус 1 со сферической полостью, в которой размещен сферический элемент 2 с выполненными в нем выемками.
Напротив каждой выемки в корпусе 1 выполнено отверстие, в котором установлены регулировочный винт 3, пружина 4, шайба 5 и шарик 6, образующие шариковый фиксатор. Сферический элемент 2 жестко связан со стержнем 7. Поджимная пластина 8 подпружинена пружинами 9 относительно корпуса 1. Сила поджима регулируется винтами 10. Стержень 7 связан с корпусом 1 пружинами 11, натянутыми с помощью винта 12 и гаек 13. В корпусе 1 установлен датчик 14, взаимодействущий с лыской, выполненной на сферическом элементе 2, В корпусе 1 также установлен электромагнит 15 с якорем 16, жестко связанным с поджимной пластиной 8.
Противоперегрузочный модуль может быть установлен на руке 17 манипулятора 18. На стержне 7 крепится рабочий орган, например захват 19.
Модуль работает следующим образом,
Манипулятор 18 совершает операции, пока захват 19 не наталкивается на препятствие. При возникновении избыточных сил шарики 6 выходят из гнезд и сферический
элемент 2 поворачивается. При этом срабатывает датчик 14, выдавая сигнал аварии.
После устранения причины аварии включается электромагнит 15 и якорь 16 отжимает поджимную пластину 8 от корпуса 1. Пружины 11 возвращают сферический элемент 2 в исходное положение, срабатывает датчик. 14 и отключает электромагнит 15.
Формула изобретения Противоперегрузочный модуль манипулятора, содержащий корпус со сферической полостью, в которой размещен сферический элемент с выполненными в нем выемками, а напротив последних в корпусе выполнены отверстия, в которых размещены шариковые фиксаторы, подпружиненные относительно корпуса, отличающийся тем, что, с целью расширения функциональных возможностей, он дополнительно содержит закрепленный на сферическом эл ементе стержень, связанный с корпусом посредством пружин, расположенных наклонно к оси противоперегрузочного модуля, поджимную пластину с отверстием,установленную на корпусе и подпружиненную относительно него, закрепленный на корпусе электромагнит с якорем, жестко связанным с пластиной, и датчик, установленный в корпусе с возможностью взаимодействия с лыской, дополнительно выполненной на сферическом элементе, причем последний частично размещен в отверстии поджимной пластины с возможностью взаимодействия с ней.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ КРЕПЛЕНИЕ ДЛЯ АВТОМАТИЗИРОВАННОЙ РАБОТЫ С ЖИДКОСТЬЮ | 2021 |
|
RU2824167C2 |
| Шарнир манипулятора | 1986 |
|
SU1393637A1 |
| Пропорциональный электрогидравлический механизм управления фрикционами гидромеханической передачи мобильной машины | 2018 |
|
RU2690542C1 |
| Механизм расфиксации зацепляющего штыря имитатора отрывной платы | 2017 |
|
RU2681803C2 |
| ЗАМОК-РАЗЪЕДИНИТЕЛЬ | 1997 |
|
RU2159369C2 |
| Программный бусинный комплекс | 2019 |
|
RU2729302C1 |
| Стенд для испытания образцов материала на растяжение | 1981 |
|
SU954849A1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2010 |
|
RU2459916C1 |
| КОДОВЫЙ ЗАМОК В.Д.КОМЛЕВА | 1993 |
|
RU2061821C1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
Изобретение относится к роботехнике. Цель изобретения - расширение функциональных возможностей робота-манипулятора. Модуль содержит корпус 1, сферический элемент 2 с выемками. В отверстиях корпуса 1 напротив выемок установлены шариковые .« фиксаторы. Сферический элемент 2 установлен при помощи поджимной пластины 8. жестко связанной с якорем 16 электромагнита 15. Стерх ень 7 жестко связан со сферическим элементом 2 и подпружинен пружинами 11 относительно корпуса 1. Датчик 14 установлен с возможностью взаимодействия с лыской, выполненной на сферическом элементе 2. При действии на захват 19 избыточных сил шарики 6 выходят из выемок, сферический элемент 2 поворачивается и срабатывает датчик 14. После устранения причины остановки включается электромагнит 15 и якорь 16 отжимает поджимную пластину 8. Пружины 11 возвращают сферический элемент 2 в исходное положение. 1 ил. (Л С J 15 Ј о ел g CJ ел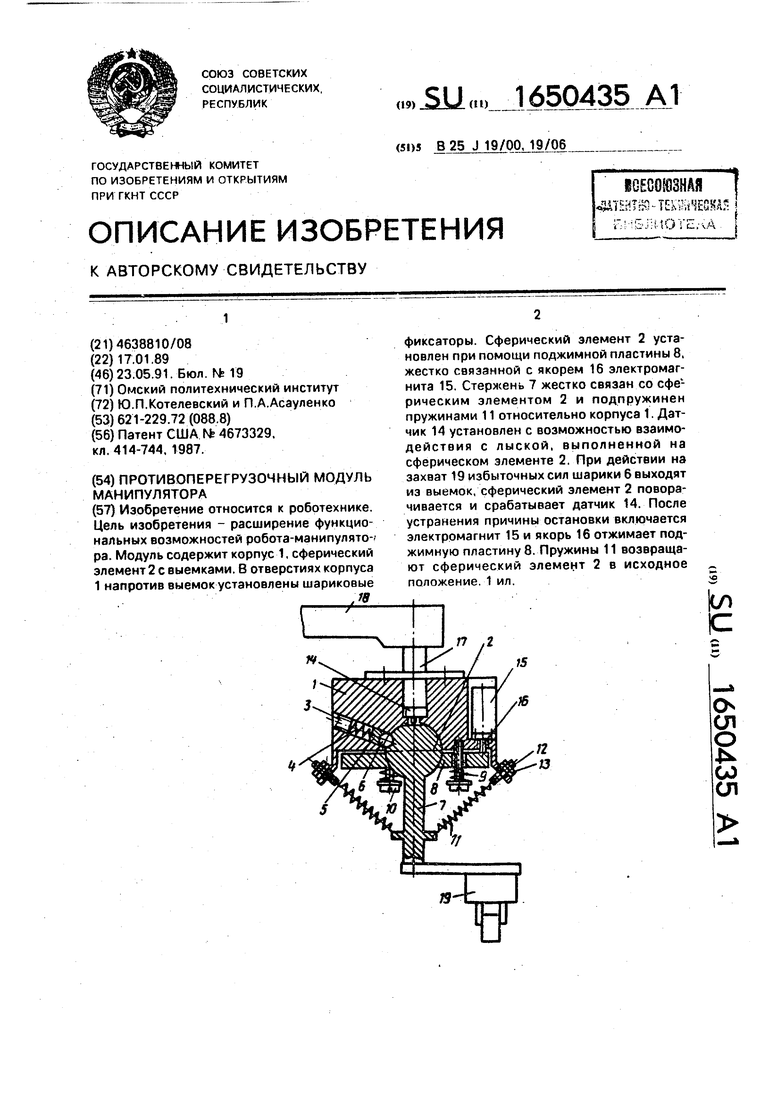
| Патент США № 4673329, кл | |||
| Мяльная машина для лубовых растений | 1923 |
|
SU414A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
