Известен способ частотного управления электродвигателем от регулируемого контура, который задает ток в обмотку статора в виде квадратурной суммы двух величин, одна из которых равна намагничивающему току двигателя, а вторая изменяется пропорционально требуемому моменту, причем частоту тока задают тем большей, чем выше скорость двигателя.
Цель изобретения - увеличение диапазона регулирования. Это достигается тем, что контур задает ток и в роторную обмотку двигателя, причем частота тока в статорной и роторной обмотках в два раза меньше частоты вращения двигателя.
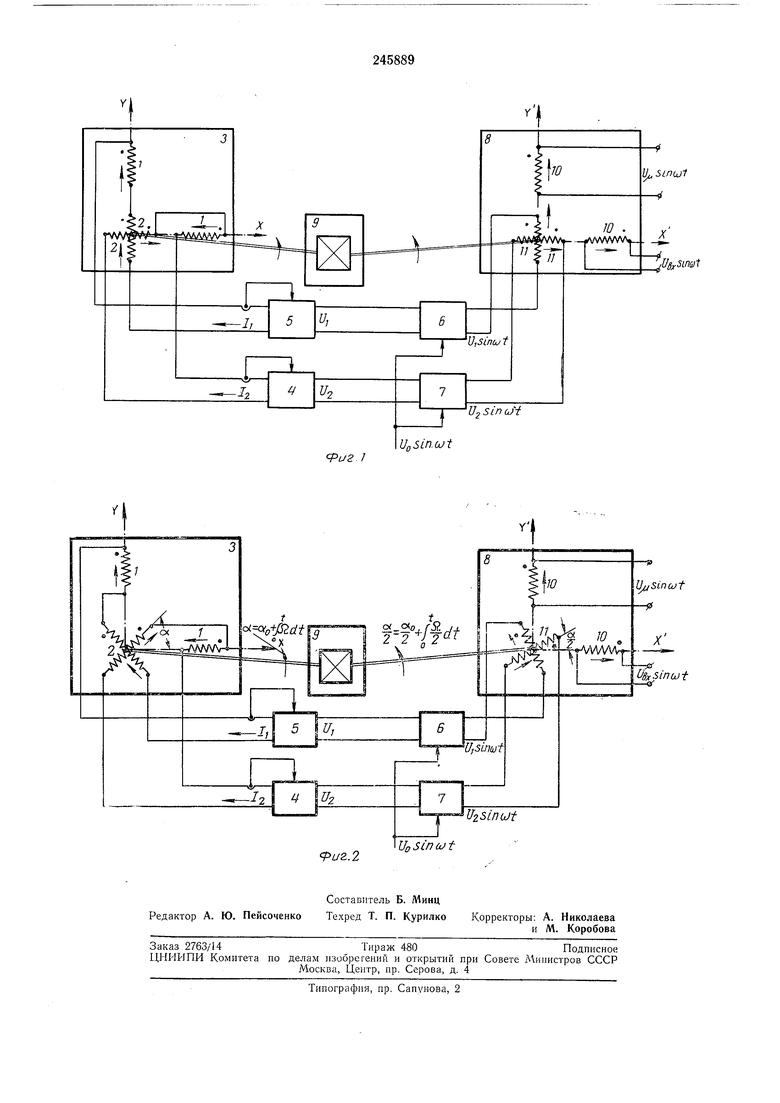
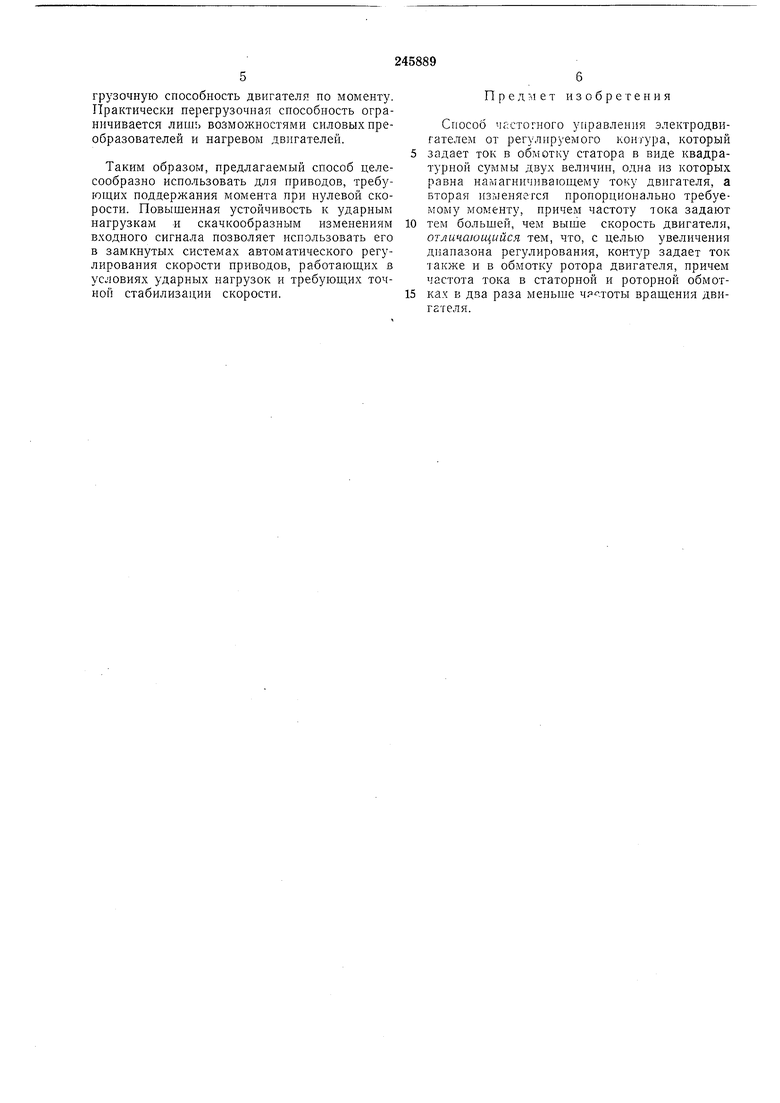
На фиг. 1 приведена блок-схема устройства, служащего для осуществления предлагаемого способа, исходное положение вала двигателя; на фиг. 2 - то же, произвольное положеиие вала двигателя.
Статорные 1 и роторные 2 обмотки двигателя 3 питаются от двух силовых преобразователей 4 и 5, охваченных глубокой отрицательной обратной связью по току нагрузки и управляемых от фазированных выпрямителей 6 и 7. Па валу двигателя закреплен индуктивный датчик 8 углового положения ротора (типа вращающегося трансформатора), вал которого сочленен с валом двигателя через понижающий редуктор 9, поэтому скорость
вращения датчика в два раза меньше скорости вращения двигателя. Статорные обмотки 10 датчика питаются от двух высокочастотных источников переменного наиряжения.
Один источник выполнен нерегулируемым и питает статорную обмотку датчика напряжением с амплитудой 6,,. , величипа которого выбирается исходя из оптимального соотношения между током намагничивания и активной составляющей тока ротора. Второй источник питания регулируется по амнлидуте t/вх для получения требуемого момента на валу.
При установке датчика на валу двигателя добиваются совмещения осей их магнитных
потоков. При этом вал двигателя находится в исходном полол ;ении.
При произвольиом ноложении вала двигателя на роторных обмотках // датчика наводятся напряжения ,,t и и-2, , причем амплитуды напряжений Ui и 11 определяются амплитудами f/ т, и t/gx и углом поворота ротора датчика- , где а - угол поворота вала
двигателя относительно исходного положения. Напряжения Uy.nmtvi sin (..ч; производят намагничивание датчика по двум взаимно перпендикулярным осям, а напряжения L/i smu.- и образуют двухфазную систему ианряют фазочувствительные выпрямители 6 и 7, опорные наиряжения которых t/osin ш имеют ту же частоту, что и напряжения, питающие датчик. Величины напряжений на выходе выпрямителей строго пропорциональны величинам Ll и f/2 и меняются в зависимости от угла
-. Если принять коэффициенты передачи
Zi
выпрямителей равными единице, то силовые преобразователи 4 и 5 будут питать двигатель токами /1 и /2, величины которых строго пропорциональны величинам lj и U.
Направление электрического вращения вектора ампервитков ротора двигателя противоположно направлению электрического вращения вектора ампервитков статора. Обеспечпвается это различным подключением начала и конца роторных и статорных обмоток по отношению к усилителям тока. Составляющая тока статора и ротора двигателя, задаваемая напряжением U , определяет рабочий поток машины, а составляющая тока статора и ротора, задаваемая t/вх , - момент машины.
Если вал двигателя находится в исходном положении, то напряжение U,isin,t создает ампервитки в вертикально расположенных и согласно включенных обмотках статора и ротора и, следовательно, производит намагничивание двигателя, т. е. создается поток по вертикальной оси. Величина тока /i строго пропорциональна напряжению f/i, которое в этом случае определяется только напряжением Uy., т. е. . .Так как ампервитки статорной и роторной обмоток равны при обтекании их одним током, то намагничивание машины происходит ампервитками. пропорциональными величине 2U .
Напряжение /7вх создает ампервитки в горизонтально расположенных и встречно включенных обмотках статора и ротора двигателя и, следовательно, намагничивания двигателя не происходит, причем /2 6г вхТок /а в горизонтально расположенной обмотке ротора взаимодействует с потоком, наводимым в вертикально расположенных обмотках статора и ротора, и создает момент М 2 /1 /2 sEE26.x бвх , который направлен против направления вращения часовой стрелки. Нри изменении фазы сигнала USK изменяется знак тока /2 и момента М.
Таким образом, при заданном (7|х const вращающий момент двигателя пропорционален по величине сигналу LB; . Нри выбранной схеме включения и питания обмоток двигателя обеспечивается режим работы, аналогичный режиму работы машины постоянного тока с компенсационной обмоткой.
Полученные зависимости справедливы для любого угла поворота ротора и датчика относительно исходного положения. Независимо от угла поворота ротора, т. е. при вращении двигателя, в пем существует поток, величина которого пропорциональна U v-, и вращение
его происходит в ту же сторону, что и вращение ротора машины, но со скоростью, в два раза меньшей. Также независимо от угла поворот а ротора ампервитки ротора и статора пропорциональны сигналу Ug и компенсируют друг друга. Их вращение происходит в сторону вращения ротора, но со скоростью, в два раза меньшей скорости вращения ротора. Эти ампервитки сдвинуты относительно ампервитков намагничивания на 90°.
Таким образом, в выражение для момента не входит синус угла между потоком двигателя и током ввиду того, что поток двигателя и ток ротора всегда имеют фазовый сдвиг,
равный 90°, т. е. при фиксации датчика на валу двигателя в нужном положении двигатель всегда работает с максимально возмол ным моментом при заданной величине токов. Нри торможении вала двигателя развивается момент Ж .U , при включении вала и при UBX. const привод разгоняется с постоянным ускорением, определяемым значением (7вх - Разгон продолжается до тех пор, пока преобразователи 4 и 5 обеспечивают токи, задаваемые t/ix и На этом участке механическая характеристика привода близка к идеально мягкой. Нелинейная область характеристики определяется моментом достижения равенства иротиво-э.д.с. двигателя и
выходного напряжения питающих иреобразователей.
Датчик 8 может быть также выполнен с числом полюсов, в два раза меньшим числа полюсов двигателя, что позволяет исключить
мехаиический редуктор, использованный для этой цели в описанном устройстве.
В случае использования многофазного датчика или двигателя необходимо производить
преобразование числа фаз на входе датчика, так как он должен питаться двухфазной системой напряжений, и на выходе датчика - в случае несовпадеиия числа фаз датчика и двигателя.
Для обеспечения режима работы привода с постоянной мощностью на валу при работе з замкнутой системе регулирования с расширенным диапазоном, возможно осуществлять регулирование обоих сигналов, питающих статорные обмотки датчика, что позволяет регулировать поток двигателя.
Применение предложенного способа управления позволяет для получения заданного
диапазона регулирования в замкнутой скоростной системе использовать преобразователи, рассчитанные на частоты, в два раза меньшие, чем необходимо для получения тех же скоростей при регулировании только со
стороны статора. Это особенно существенно
для силовых преобразователей, выполненных
грузочную способность двигателя по моменту. Практически перегрузочная способность ограничивается лишь возможностями силовых преобразователей и нагревом двигателей.
Таким образом, предлагаемый способ целесообразно использовать для приводов, требующих поддержания момента при нулевой скорости. Повынленная устойчивость к ударным нагрузкам и скачкообразным изменениям входного сигнала позволяет использовать его в замкнутых системах автоматического регулирования скорости приводов, работающих в условиях ударных нагрузок и требующих точной стабилизации скорости.
6 П р е д та е т изобретения
Способ чг:стогного управлбния электродвигателем от регулируемого контура, который
задает ток в обмотку статора в виде квадратурной суммы двух величин, одна из которых равна намагничивающему току двигателя, а вторая изменяется пропорционально требуемому моменту, причем частоту тока задают
тем большей, чем выше скорость двигателя, отличающийся тем, что, с целью увеличения диапазона регулирования, контур задает ток также и в обмотку ротора двигателя, причем частота тока в статорной и роторной обмотках в два раза меньше вращения двигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1979 |
|
SU864476A1 |
| Электропривод | 1979 |
|
SU942230A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| ВЫСОКОПРОИЗВОДИТЕЛЬНАЯ МЕЛЬНИЦА | 2011 |
|
RU2568432C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для частотного управления асинхронным двигателем с фазным ротором | 1977 |
|
SU743152A1 |
| УСТРОЙСТВО ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2369002C2 |
| Устройство для регулирования частоты вращения трехфазного асинхронного электродвигателя | 1988 |
|
SU1679596A1 |