Т I П 4
Изобретение относится к электротехнике и может быть использовано для управления преобразователем с заданной кривой выходного параметра (напряжения или тока)„
Цель изобретения - уменьшение коммутационных потер за счет снижения частоты переключений и улучшение динамических характеристике
На чертеже представлена структура следящего преобразователя, управляемого по предлагаемому способу,,
Преобразователь содержит подключенный к источнику 1 напряжения вентиль- ный коммутатор 2, через фильтрующую индуктивность.соединенный с емкостью LC-фильтра 3 или нагрузкой 4 „ Коммутатор (например, мостовой инвертор) выполнен на управляемых вентилях, в качестве которых могут быть использованы транзисторы или запираемые тиристоры,, Информация о переменных состояниях с датчиков 5-7 и сигнал задания по выходной переменной из блока 8 задания принимается вычислителем 9, выдающим импульсы управления через промежуточный усилитель 10 на коммутатор 2 о
Способ управления преобразователем состоит в следующеМс
Вычисляется рассогласование Ј(t) (разность выходной переменной и задания) на некоторый интервал времени вперед, равный в данном случае длительности такта модуляции h0 При вычислении прогноза предполагается, что очередное переключение происходит в момент t (отсчет времени ведется от момента последнего переключения)0 В результате блок вычисления генерирует переключательную функцию s(t), однозначно определяющую позицию коммутатора и моменты переключений, т,.ес смены позициИо Первой активной пози- ции s +1 соответствует такое состояние коммутатора, когда включены один вентиль анодной группы и один вентиль катодной группы мостовой схемы; при второй активной позиции s -1 включены другие вентили анодной и катодно группы; при позиции зануления s О включаются два вентиля анодной или катодной группьк В процессе работы мостового инвертора к нагрузке прикладывается напряжение источника питания со знаком + или -, а в позиции эанулёния выходное напряжение коммутатора равно нулю,. Переход in одной
„
позиции в другую осуществляется, когда прогноз рассогласования принимает нулевое или минимальное значение
s -sign Ј
Вычисление прогнозируемого значения рассогласования производится по формулам, полученным в результате решения системы дифференциальных уравнений для преобразователя с трехпози- ционной 1Л1М„ Прогноз можно представит в следующем виде:
6 f + S W,
где одна из составляющих определяется текущими значениями переменных состояния (свободная составляющая f), другая - ожидаемыми позициями коммутатора (вынужденная составляющая w), a s принимает значения +1, -1, 0„
Для составляющих прогноза при отслеживании напряжения LC-фильтра используются следующие формулы:
f i-sin h + e.-cos h -
w.
u (cost - cos h) ,
где i - выходной ток;
h - длительность такта модуляции;
е - напряжение на нагрузке;
ёГ - задание по напряжению;
t - локальное время„ При этом коммутатор переходит из позиции зануления в активные позиции по условиям:
.,.
40
, О
Ј +
s +1
|f - s -1„ При движении из активной позиции на втором такте интервала прогноза текущий знак импульса может сохраниться либо измениться„ Этим возможным состояниям соответствуют функции
Ј f + S Wqi s +1,
где WQ u(1 - cost).
Переход из активных позиций в позицию зануления осуществляется, если при нахождении в текущей позиции вы- поЛняется условие переключения для s +1
f + wa т, О, для s -1
f - Wq-cOo
При изменении предлагаемого способа примерно вдвое снижаются массо- габаритные показатели фильтра и, следовательно, попытается К1Щ преобразователя. Кроме того, согласно способу при реализации низкочастотной IIMM при удовлетворительных параметрах фильтра уменьшаются коммутационные потери и экономится энергия, что особенно важно для мощных преобразователей с использованием дешевых переключающих элементов„ Применение способа вследствие хорошего качества отслеживания эффективно при построении систем, к которым предъявляются высокие эксплуатационные требования (например работа с нелинейной нагрузкой, хорошая динамика, высокий КПД и др.)«
Формула изобретения
Способ управления мостовым следящим инвертором с выходным LC-фильтром заключающийся в том, что формируют сигнал е-L. задания по напряжению, измеряют входное и выходное напряжения и и е и ток i конденсатора фильтра, задают интервал времени, длительность ,h которого равна предположительной длительности такта модуляции выходного напряжения инвертора, устанавливают первую активную позицию вентилей, при которой включены один вентиль анодной и один вентиль катодной групп, вторую активную позицию, при которой включены другие вентили анодной и катодной групп, и позицию зануления, при которой включены оба вентиля анодной или катодной групп,
переключают вентил и , одчо;- позкши: и другую, о т л у, ч я. г и, и V ( ч тем, что, с целью ум, ньпх ч:я к ,мму- тационных потерь : учзги -Г .ч ггииа сг- ческих х фахтсрис г-гк, o,vi . ь г выполненном каждо-v п ректзолечия t,-i- чинают отсчет токлх. npjvtihn г., вычисляют свободную с г vo условного прогноза р с1 с о о глас of дни я I по форму;те
Ј - i sinii + е cosh - п
5
ВЫЧИСЛЯЮТ ПЫНуЖДеН11Ы .
w и wo ycj jBHoro про. сования пи формулам
г
-о-11лаиля ошнг, coja рассогла
«„ и
wo
и
tV2;
(1 - ms h),
вычигтяют разности и суммм свободно; и вынужденных составллтои х
f - w
Я
f + W.
f - wfl ч f + w(
контролируют значения вьгчисленнь-х. разностей и сумм и Е момент времени, когда выполняется условие f - , переключают вентили из псрзлй активной позиции в позицию зануления, в момент времени, когда выполняется условие f + ,, вентили переключают из позиции зануления во вторую активную позицию, в момент времени, когда выполняется условие f - , вентили переключают из второй активной позиции в позицию зануления, а в момент времени, когда выполняется условие f + w0 с. О, вентили переключают из позиции зануления в первую активную позициюо
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления мостовым следящим инвертором с выходным LC-фильтром | 1987 |
|
SU1653105A1 |
| Способ управления трехфазным инвертором с квазисинусоидальным выходным напряжением | 1989 |
|
SU1767667A1 |
| Способ управления преобразователем с широтно-импульсной модуляцией | 1980 |
|
SU886186A1 |
| ВЫСОКОВОЛЬТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ФИЛЬТРОКОМПЕНСИРУЮЩЕЙ ЦЕПЬЮ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВЫХОДНОЙ МОЩНОСТЬЮ | 2007 |
|
RU2335841C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХФАЗНЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА С ПОМОЩЬЮ ТРЕХФАЗНОГО МОСТОВОГО ИНВЕРТОРА | 2018 |
|
RU2682242C1 |
| Устройство для управления преобразователем с двухпозиционной широтно-импульсной модуляцией | 1986 |
|
SU1480066A1 |
| СТАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1969 |
|
SU238656A1 |
| Способ управления трехфазным мостовым инвертором | 1978 |
|
SU748793A1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
Изобретение относится к электротехнике и может быть использовано для управления преобразователем с заданной кривой выходного параметра (напряжения или тока), Цель изобретения - уменьшение коммутационных потерь за счет снижения частоты переключений и улучшение динамических характеристик Преобразователь содержит вентильный коммутатор 2, подключенный к источнику напряжения 1 и через фильтрующую индуктивность - к нагрузке 4 или емкости LC-фильтра 3. Коммутатор (например, мостовой инвертор) выполнен на управляемых вентилях, в качестве которых могут использоваться транзисторы или запираемые гпристоры,, Управление преобразователем осуществляется вычислителем 9,принимающим информацию о переменных состояниях (с датчиков 5-7), сигнал задания по выходной переменной из блока 8 задания, и выдающим импульсы управления через промежуточный усилитель 10 на коммутатор 2. Вентильный коммутатор 2 преобразователя, управляемого по предлагаемому способу, устанавливается в три позиции, соответствующие определенному состоянию вентилей (две активные и позиция зануления), а переход из одной позиции в другую осуществляется по результатам вычисления прогнозируемого значения рассогласования выходной переменной. 1 ил„ (/, С сг СП о: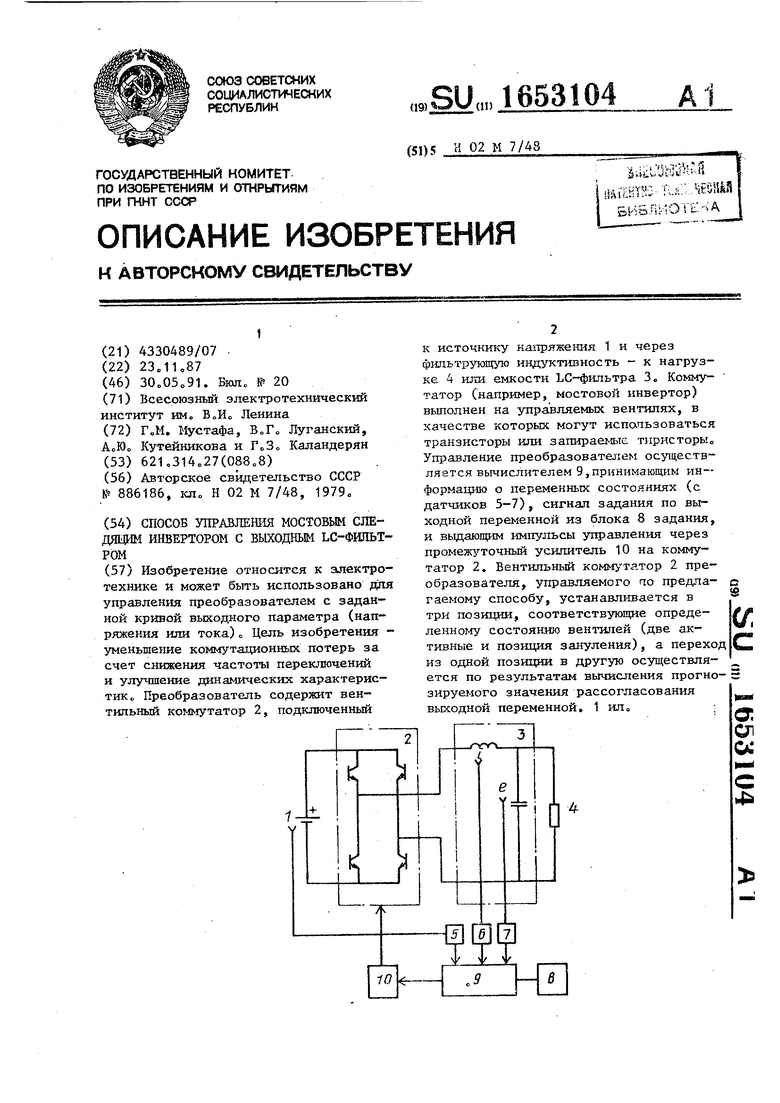
| Способ управления преобразователем с широтно-импульсной модуляцией | 1980 |
|
SU886186A1 |
