Изобретение относится к электро- технике, в частности к преобразовательной технике, и может быть использовано для управления преобразовате- с лем с заданной кривой выходного параметра (например, напряжения).
Цель изобретения - улучшение динамических характеристик преобразователя путем определения каждого момента Ю переключения коммутатора по прогнозируемому значению рассогласования.
На фиг. 1 приведена структурная схема описываемого устройства; на фиг. 2 - функциональная схема блока 15 вычисления прогнозируемого значения ассогласования выходного напряжения (условного прогноза рассогласования ПР); на фиг. 3 - диаграммы работы устройства.20
Устройство, осуществляющее управение преобразователем с коммутатором 1 (выполненным, например, по полумостовой схеме), источником 2 входного напряжения, однозвенным LC-филь- 25 тром 3 и нагрузкой 4, содержит датчик 5 напряжения источника входного напряжения, датчик 6 тока емкости фильтра преобразователя, датчик 7 напряжения на нагрузке, блок 8 задания, 30 блок 9 вычисления УПР, усилитель 10 управляющих импульсов, причем блок 9 вычисления УПР подключен входами к датчикам 5 - 7 и к блоку 8 задания, а выходом - к усилителю управляющих 35 импульсов.
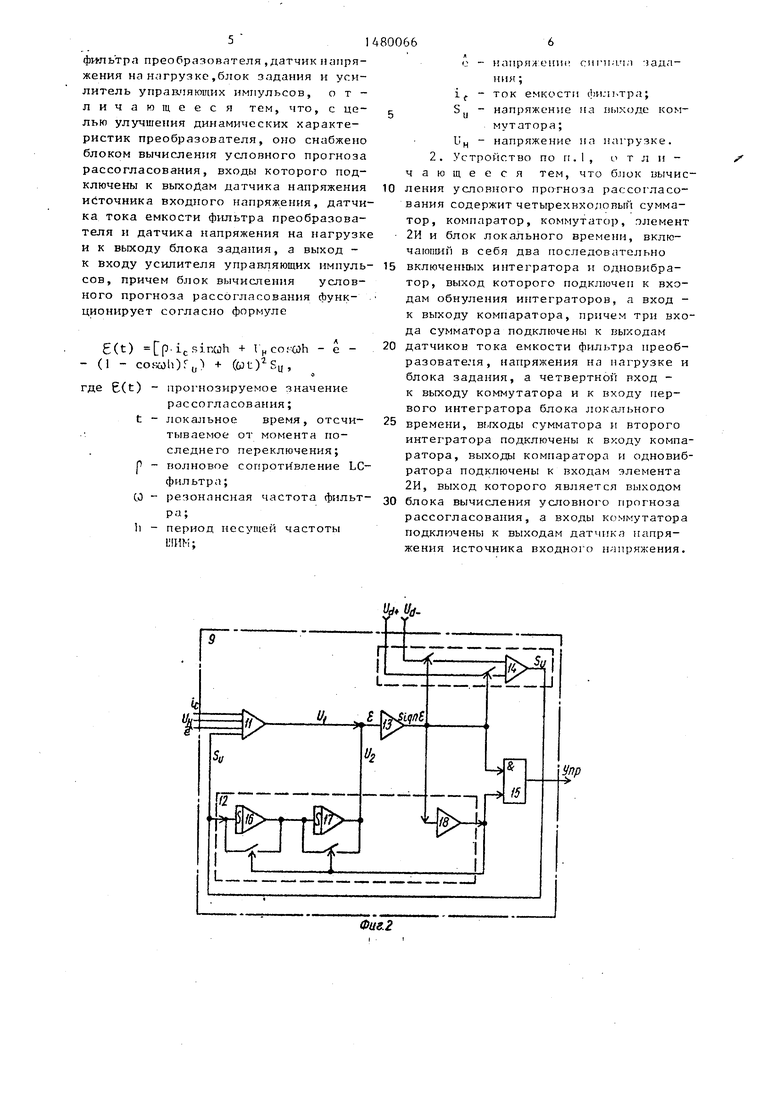
Елок 9 вычисления условного прогноза рассогласования содержит сумматор П, блок 12 локального времени, компаратор 13, коммутатор 14, эле- 40 мент 2И 15, причем входами блока 9 вычисления являются выходы датчиков 6, 7, выход блока 8 задания и выходы датчш а 5 источника входного напряжения, соответственно с первого по тре- 45 тий вхэд блока 9 УПР являются входами сумматора 1, четвертый вход сумматора 11 подключен к входу блока 12 локального времени, соответственно выходы сумматора 11 и блока 12 под- „ ключены к входу компаратора 13, к выходу которого подключены третий и четвертый входы коммутатора 14, вторыми входами которого являются входы Ujt, Ud блока 9 УПР, а выход подклю-„ чен к входу блока 12 локального времени, выходы компаратора 13 и блока 12 являются входами элемента 2И, вы- ход которого является выходом блока
9 вычисления условного прогноза рассогласования .
Устройство работает следующим образом.
На выходах датчиков 5-7 формируются сигналы, пропорциональные напряжению входного источника питания (U, Uj. для схемы со средней точкой), мгновенным значениям тока емкости i и напряжению UH на нагрузке соответственно. Сигналы с датчиков 5-7 поступают в блок 9 УПР, из которого через блок 10 усилителя управляющих импульсов поступают сигналы управления ключами коммутатора преобразователя 1.
Блок 9 УПР работает следующим образом.
Вычисление прогнозируемого значения рассогласования Ј(t) производится в предположении, что очередное переключение происходит в текущий момент времени tn (отсчет времени ведется от момента последнего переключения) . Из решения системы дифференциальных уравнений эквивалентной схемы фиг. 1 получена формула вычислени условного прогноза рассогласовяпия при длине интервала прогноза и h - t, которая после соответствующих преобразований приводится к виду представляющему собой приближение второго порядка к точному значению прогноза и обеспечивающему точность несложной аппаратурной реализации:
Ј(t) p-ic sincoh + Г.и-coswli - - е - (1 - cosflh)Su + (cot). Su, (1)
гдеЈ((:) прогнозируемое значение рассогласования;
t - локальное время, отсчитываемое от момента последнего переключения;
р - волновое сопротивление LC- фильтра;
СО - резонансная частота фильтра;
h - период несущей частоты ШИМ;
е - напряжение сигнала задания;
ic - ток емкости Лильтра; Ј ц - напряжение на выходе коммутатора.
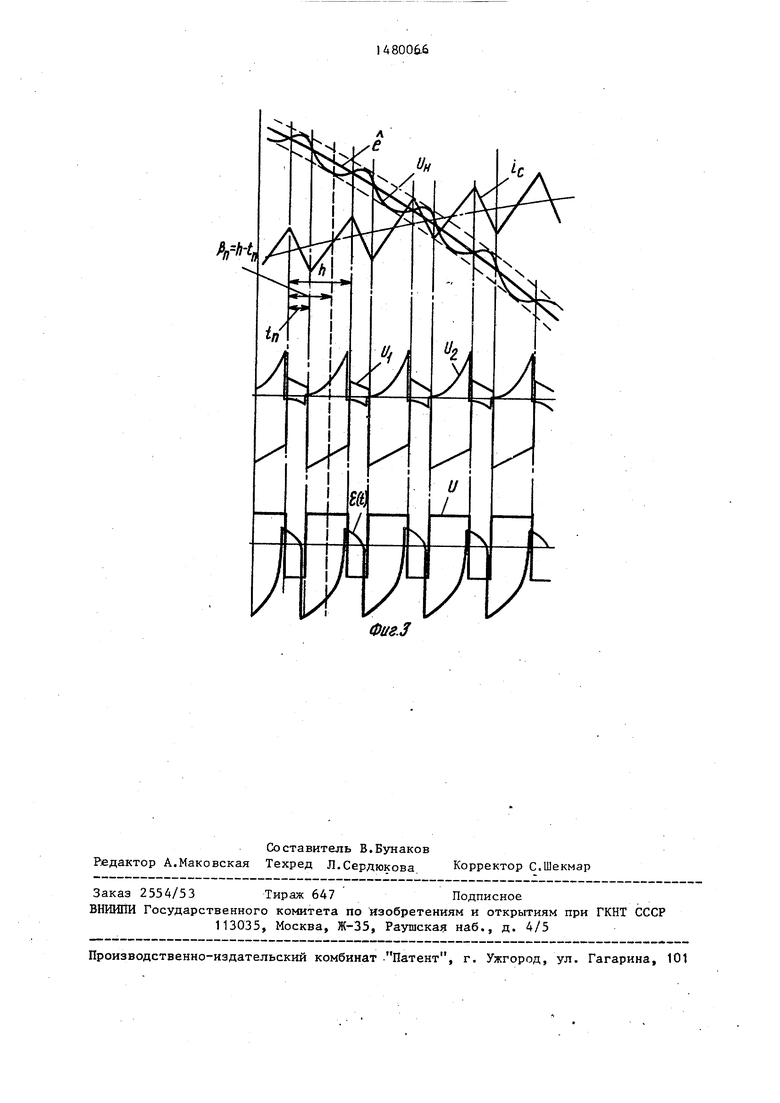
На фиг. 3 представлены диаграммы работы устройства, реализующего вычисление прогнозируемого значения
рассогласования Ј(t) по формуле (1) и вырабатнвающего функцию управления S -signЈ, определяющую момент переключения и одно из двух возможных состояний (позиций) коммутатора с входным напряжением.
Отдельные вычислительные операции осуществляют блоки устройства:
U, Ср- icsino)h + lM.cos(Dh - с - - (1 - cos(Oh)Sul; U4 - (cot)aSu,
где t, - выходной сигнал сумматора 1
на вход которого поступают слагаемые с постоянными коэффициентами sinCoh, cosUh и (I - cosCOh), не зависящие от локального времени t; - выходной сигнал блока 12 ло
кального времени. Очевидно, что блок 12 может быть выполнен, например, с использованием генератора пилообразного напряжения, отсчитывающего локальное время t, квадратора и умножителя. Недостатками такой реализации блока являются большое количество элементов, сложная настройка и существенная аппаратурная погрешность при выполнении операции перемножения. Возможен другой (более простой) вариант выполнения блока 12 с использованием замены умножения медленных (мало меняющихся на интервале рассмотрения) функций на t и t интегрированием. Основывается он на равенстве t t
+ b + 2J (с + -)dt)dt
n0-1
a + (b. + b t) + ct%
(2)
которое является точным при постоянных коэффициентах а, Ь, с, а при медленно меняющихся функциях a(t), b(t), c(t) - приближенным. В данном случае на интервале рассмотрения (такте несущей частоты) входные сигналы изменяются мало, поэтому формула (2) обеспечивает хорошее приближение и возможность более простой аппаратурной реализации.
В этом случае блок 12 выполняется в виде последовательно включенных интеграторов 16, 17 (фиг. 2), управляемых импульсом одновибратора 18.
Реализация формулы (1) второго порядка в том и другом исполнении обеспечивает малое изменение крутизны кривой Ј(t) в окрестности моментапере
с
10
15 0
5 Q
0
5
0
ключения и тем самым повышает точность его определения.
Сигнал U2 с выхода второго интегратора с сигналом 4 сумматора поступает на вход компаратора 13, преобразующего аналоговую функцию Ј(t) в логическую функцию signЈ. Сигнал S(t) с выходным импульсом одновибратора 18 в момент времени t поступает на элемент 2И. Вычисление следующего момента переключения tnM начинается после окончания зануленпя интеграторов импульсом одновибратора 18.
Коммутатор 16 формирует на выходе сигнал и может быть выполнен, например, с использованием повторителя напряжения на базе операционного уси лителя, на вход которого через ключи подается положительное или отрицательное напряжение датчиков входного источника.
Сигнал УПР формируется на выходе элемента 2И.
Данное устройство позволяет осуществлять отслеживание требуемого значения выходного параметра при малой кратности частот, что дает возможность реализовать преобразователь на большие мощности с использованием более дешевых переключающих элементов (транзисторов, запираемых тиристоров).
Применение устройства позволяет снизить коммутационные потери и тем самым уменьшить размеры охладителей
и всей конструкции в целом, а также 1 сэкономить энергию.
Кроме того, достигается улучшение эксплуатационных характеристик (коэффициент несинусоидальности, КЩ л) при работе преобразователя с нагруз- кой (как с линейной, так и с нелинейной) . Улучшается качество электроэнергии в переходных процессах при переключениях нагрузки. Это позволяет снизить массогабаритные показатели и стоимость фильтра потребителя и использовать преобразователь меньшей номинальной мощности при работе с нелинейной нагрузкой.
Формула изобретения
1. Устройство для управления преобразователем с двухпозиционной ши- ротно-импульсной модуляцией, содержащее датчик напряжения источника входного напряжения, датчик тока емкости
фильтра преобразователя,датчик напряжения на нагрузке ,блок задания и усилитель управляющих импульсов, отличающееся тем, что, с целью улучшения динамических характеристик преобразователя, оно снабжено блоком вычисления условного прогноза рассогласования, входы которого подключены к выходам датчика напряжения источника входного напряжения, датчика тока емкости фильтра преобразователя и датчика напряжения на нагрузк и к выходу блока задания, а выход - к входу усилителя управляющих импульсов, причем блок вычисления условного прогноза рассогласования функционирует согласно формуле
Ј(t) p.icsjnuh + IHco.-«h - е - - (1 - создЮ + («t)aSu,
где 6(t) - прогнозируемое значение рассогласования;
t - локальное
время, отсчитываемое от момента последнего переключения;
- волновое сопротивление LC- фильтра;
- резонансная частота фильтра;
- период несущей частоты ШИК;
о - напрял енш гипыгы ч здания ;
if - ток емкости фильтра; S - напряжение нл выходе коммутатора;
UH - напряжение на нагрузке. 2. Устройство по п.1, отличающееся тем, что бпок вычис- ления условного прогноза рассогласования содержит четырехвхолопын сумматор, компаратор, коммутатор, элемент 2И и блок локального времени, включающий в себя два последовательно 5 включенных интегратора и одновибра- тор, выход которого подключен к входам обнуления интеграторов, а вход - к выходу компаратора, причем три входа сумматора подключены к выходам 0 датчиков тока емкости фильтра преобразователя, напряжения на нагрузке и блока задания, а четвертной вход - к выходу коммутатора и к входу первого интегратора блока локального 5 времени, вьгходы сумматора и второго интегратора подключены к входу компаратора, выходы компаратора и одновиб- ратора подключены к входам элемента 2И, выход которого является выходом 0 блока вычисления условного прогноза рассогласования, а входы коммутатора подключены к выходам датчика напряжения источника входного напряжения.
W
ФигЗ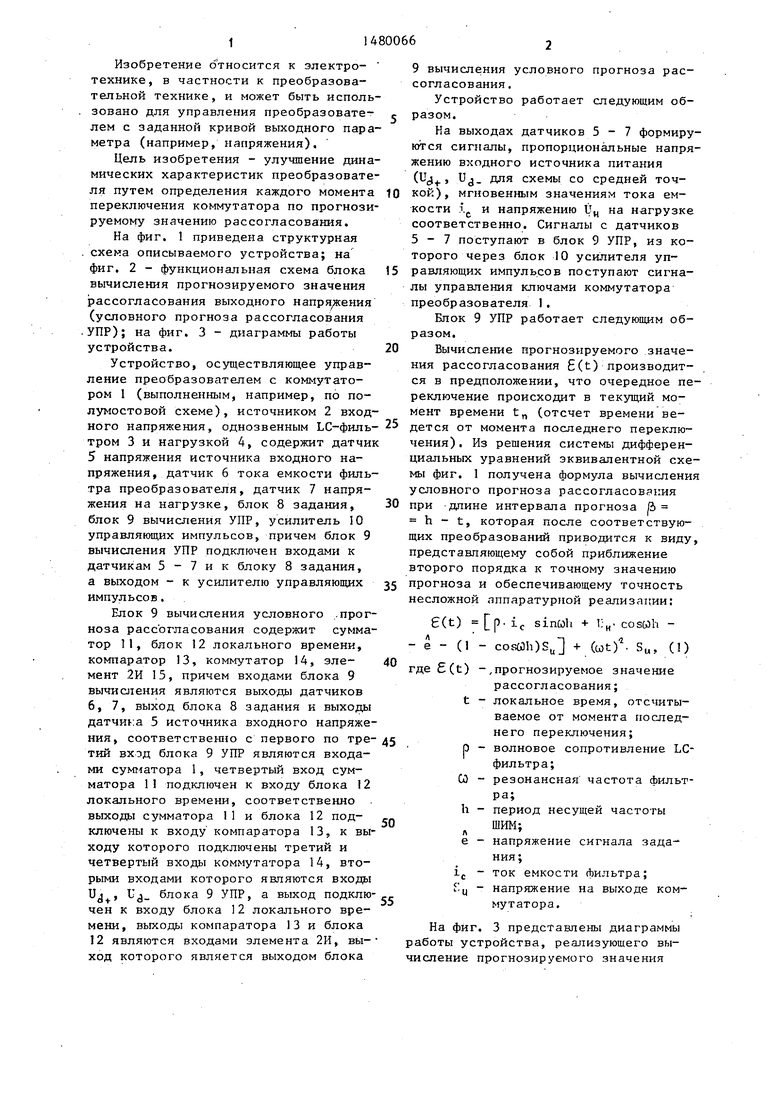

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления преобразователем с широтно-импульсной модуляцией | 1980 |
|
SU886186A1 |
| Способ управления мостовым следящим инвертором с выходным LC-фильтром | 1987 |
|
SU1653105A1 |
| Способ управления мостовым следящим инвертором с выходным LC-фильтром | 1987 |
|
SU1653104A1 |
| Широтно-импульсный N-фазный инвертор | 1989 |
|
SU1815776A1 |
| Устройство для контроля уровня подготовки операторов | 1987 |
|
SU1472937A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
Изобретение относится к преобразовательной технике, а именно к устройствам управления преобразователями, содержащими коммутатор и фильтр. Цель изобретения - улучшение динамических характеристик преобразователя путем определения каждого момента переключения коммутатора по прогнозируемому значению рассогласования выходного параметра. Устройство содержит блок 9 вычисления условного прогноза рассогласования, входы которого подключены к выходам датчика 5 напряжения, источника входного напряжения, датчика 6 тока емкости фильтра преобразователя, датчика 7 напряжения на нагрузке, блока задания 8, а выход - ко входу усилителя 10 управляющих импульсов. Устройство непрерывно на каждом межкоммутационном интервале вычисляет прогнозируемое значение рассогласования согласно выражению, являющемуся приближением второго порядка к точному прогнозируемому значению рассогласования, и подает последовательность импульсов управления в каждый момент времени, соответствующий моменту переключения коммутатора и определяемый по прогнозируемому значению рассогласования. 1 з.п.ф-лы, 3 ил.
| Патент США № 3781634, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления преобразователем с широтно-импульсной модуляцией | 1980 |
|
SU886186A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
