(5.4) СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ
С широтно-им ПУЛЬС НОЙ МОДУЛЯЦИЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления преобразователем с двухпозиционной широтно-импульсной модуляцией | 1986 |
|
SU1480066A1 |
| Способ управления мостовым следящим инвертором с выходным LC-фильтром | 1987 |
|
SU1653104A1 |
| Способ управления мостовым следящим инвертором с выходным LC-фильтром | 1987 |
|
SU1653105A1 |
| Способ управления трехфазным инвертором с квазисинусоидальным выходным напряжением | 1989 |
|
SU1767667A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2021 |
|
RU2759688C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
| Цифровая следящая система | 1979 |
|
SU924663A1 |
| Устройство для подключения однофазных нагрузок к электрической сети | 1983 |
|
SU1125701A1 |
| Широтно-импульсный N-фазный инвертор | 1989 |
|
SU1815776A1 |
I
Изобретение относится к электротехнике и может быть использовано цля yn-i равления преобразователем с заданной формой кривой выходного параметра (напряжения или тока).
Известен способ управ/кния преобра- , зователем с широтно-ймпульсной модуляцией с запрограммированной заранее последовательностью переключений, где моменты переключений устанавливают так, чтобы обеспечить отсутствие в выходном напряжении коммутатора максимально возможного числа высших гармоний tl} .
Однако такой способ неприменим при нелинейной загрузке, например, когда при синус СИ ца льном напряжении потребляется несинусридальный ток.
Наиболее близким к предлагаемому по техническим средствам и достигаемому результату является способ управления преобразователем с широтно-ймпульсной моцуляцией, содержащий коммутатор и фильтр, состоящий в том, что подают две Последовательности импульсов управления
Коммутатора, первую - в фиксированные моменты времени, включающую коммутатор, а вторую - в моменты равенства измерен- выходного параметра и сигнала задания, включающую коммутатор. Полярности ШИМ-импульсов определяются полярностью сигнала задания 2 .
Этот способ обеспечивает недостато но широкие функциональные возможности, так как при использовании фильтра
10 высокого порядка (больше em ницJJ) ухудшаются устойчивость преобразователя и форма кривой выходной координаты (параметры), что особенно резко проявляется при работе на нелинейную нагрузку,
15
. Цель изобретения - расширение ф5гнкциональных возможностей работы преобразот.вателя за счет повышения его-устой 1ивости и улучшение формы выходного параметра (тока, напряжения).
20
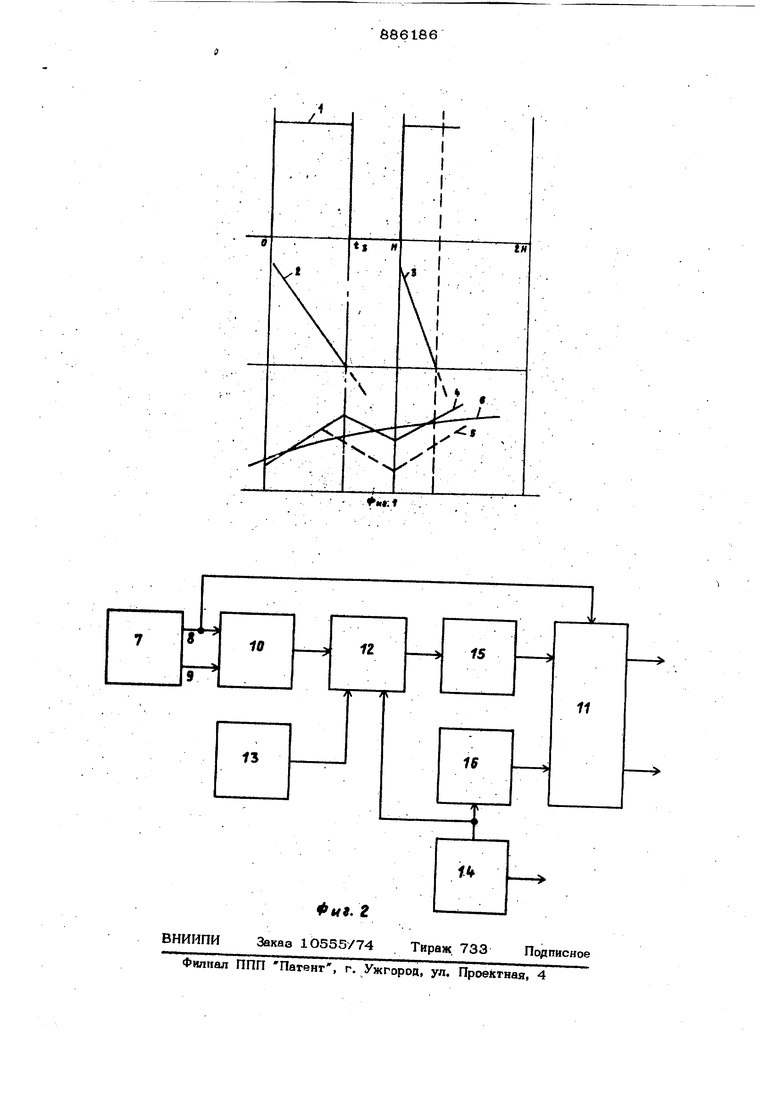
Поставленная цель дс)стигается тем, что дополнительно измеряют переменные состояния фильтра,- в результате всех измерений вычисляют прогнозируемое значение выходного параметра на некоторый интервал времени вперед, меньший периода несущей частоты, одновременно вычисляют значение сигнала задания на такое же время вперед и в момент равенства вычисленных величин .вырабатывают импульс второй последовательности, при этом непосредственно перед каждым импульсом первой последовательности по измеренным величинам, указанным выше, вычисляют на постоянный интервал времени вперед два прогнозируемых значения выходного параметра, соответствуююших положительной и отрицательной полярности импульса выходного напряжения коммутатора, сравнивают их с соответствующей заданной величиной и выбирают полярность, соответствующую меньшему по модулю рассогласованию. На 4иг. I представлены диафрагмы, по5ЮН5ПС1Щие сущность способа управдания на фиг. .2 - структурная схема системы управления, реализующей способ. На фиг. I изображены аве последовательности импульсов управления - диаграмма 1; кривые 2 и 3 условного проггоза рассогласования (УПР); кривые 4 и 5 выходного напряжения при правильном и преждевременном занулвнии коммутатора соответственно, и кривая 6 напряжения задания. Г Структурная схема системы управлени {фиг. 2) содержит релаксациодаый генератор 7, выходь. 8 ц 9 которого подключены ко входам функционального преобразователя 1О, распределительное устройство 11, блок 12 умножения, блок 13 задания, блок 14 датчиков, нуль-орган 15, блок 16 выбора знака. Рассмотрим реализацию способа управления преобразоватедам, состо5эвдим из входного источника ЭДС, коммутатора, Ъднрзвённого Г-образного LC-фильтра и нагрузки, и обеспечивающим за счет широтно-импульсной модуляции (осуществляемой коммутатором) и последующей филь рации (осуществляемой фильтром) под чение синусоидалгэной формы найряжения на- грузки. Для регулирования используют дв последовательности импульсов управления переключающие коммутатор. В первой из них моменты переключений неуправляемы (равностоящие моменты О, Н, 2Н..., где Н - период несущей частоты), и определ$потся независимым, задающим генератором. В эти моменты времени коммутатор устанавливают в активное состо5Шие, ког да к нагрузке приложено напряжение вхоо ного источника со знаком плюс или ми- нус. Вторую последовательность образуют моменты tj зануления,. при которых коммутатор устанавливают в состояние, когда.его выходное напряжение тождественно равно нулю. Моменты зануления являются управляемыми. В предлагаемом способе эти момен ты определяют следующим образом. По измеренным значениям переменных состояний фильтра, нагрузки, производной тока нагрузки, по известным значениям Н а гфяжения задания его производной непрерьюно вычисляют прогнозируемое значение рассогласования выходного напряжения на некоторое время вперед. Прогноз вычисляют в предположении, что напряженке коммутатора зануляется в текущий момент времени -t (отсчет ведут от моментов первой последовательности переключений), и в этом смысле она является условием (условный прогноз рассогласования - УПР). Кривая УПР имеет почти пилообразный вид (кривая .2, на фиг. 1), располагающийся на обеих сторонах временной осн. Такой вид кривой УПР обусловлен тем, что, во-первых, все переменные по которым вычисляют УПР в течение цикла, изменяются в небольших пределах (обуславливают линейность) и, во-вторых, параметры схемы выбирают так, чтобы иметь по крайней мере одно совпадение отслеживаемого напряжения к задания в /каждом цикле (обуславливает переход нуль). Из фяг. 1 видно, что если занулить коммутатор в начале периода, то УПР будет велик, В дал|.нейшем он снижается, а затем (если занулить слишком поздно) поменяет знак. В следзтощем периоде характер изменения фактического рассогласования тот же (кривая 3). Коммутатор зануляют в моменты перехода этой функции через нуль. В струК1урной схеме ретксационный генерато{э вырабатывает на выходе 8 импульсы в моменты О, И, 2Н,..., и на выходе 9 - пилообразное напряжение, пропорциональное текущему времени . Функ циональнь1й преобразователь 10 формирует УПР функциисоз WP& и р9,. где 9 интервал прогнозирования, -yp-jjg - резонансная частота )а. Блок 12 умножения, состоящий из умножителей и сумматоров, формирует из значений переменных состояния (ТОКИ инцуктивностей, напряжения емкостей, поду чаемые из силовой схемы блоком 14 датчиков), переходных фут1Кций фильтра напряжения зацания и его 5 производной (выдаваемой блоком 13 зада ния) УПР. Нуль-орган 15 вырабатывает импульсы в момент перехода кривой УПР через нуль. Распределительное устройство 11 формирует сигналы управления вентилями комму Тагора.Кроме опрецежния момента занудания система управления вычисляет требуемый знак очередного импульса коммутатора. Для этого в блоке 16 выбора знака перед очередным тактовым моментом сравнивают два УПР на период несущего сигнала вперед,вычисляемые в предположении, что очередной импульс имеет знак полюс или минус соответстве но. Применение предлагаемого способа управления позволяет расширить функциональные возможности преобразователя, а именно улучшить форму кривой выхоаной координаты и повысить устойчивость при работе преобразователя как на линей нук, так и на нелинейную нагрузку. Улуч шением формы кривой вькодной координа ты можно получи1ъ заданный коэффициент нелинейных искажений при относительно меньших параметрах фильтра, что снижает массогабаритные показатели и стоимость фильтра. Повышение устойчивости работы преобразователя независимо от вида и характера нагрузки делает его универсальным, позволяет снизить затраты на управление и применять такие преобразователи для питания болэе ответственных потребителей. Формула изобретения Способ у1фавления преобразоватешм с широтно-импульсной мo lyляциeй, содерн 86- 6 жащим коммутатор и фильтр, состоящий в том, что подают две последовательности импульсов управдания на коммутатор, первую из которых осуществляют в фиксированные моменты времени, отличающийся тем, что, с целью расширения функциональных возможностей, дополнительно измеряют переменные состояния фи/ьтра, в результате всех измерений вычисляют прогнозируемое значение выходгного параметра на некоторый интервал времени вперед, меньший периода несущей частоты, одновременно вычисляют значение сигнала задания на такое же время вперед и в момент равенства вычисленных величин вырабатьюают импульс второй п« следовательности, при этом непосредственно перед каждым импульсом первой последовательности по измеренным величинам, указанным выше, вычисляют на постоянный интервал времени вперед два прогнозирую емых значения выходного параметра, роответствуюших положительной и отрицательной полярности импульса выхо/шого напряжен ния коммутатора, сравнивают их с соответствующей заданной величиной и выб рают полярность, соответствукядую меш шему по модулю рассогласованию. Источники информации, 11ринятые во внимание при экспертизе 1. Патент Англии Mi 31О2Э5, КЛ. Н 02 М 7/52, 1973. 2. Зиновьев Г. С. и Попов В. И. Анализ одного из способов управления инвертором напряжения. - Устройства преобразователей техники. Вып. 4, Киев, 197О, с.- 113-125.
