(21)4472360/09
(22)12.07.88
(46) 30.05.91. Бюл. V 20 (72) Н.Н.Козлов, Ю.А.Корнеев, Д.Ю.Красных, Р.А.Мяльк и В.В.Тома- шевский
(53)621.396.6(088.8)
(56)Гольденберг Л.М. и др. Цифровая обработка сигналов. Справочник. М. : Радио и связь, 1985, с.53, рис.2.6.
(54)ЦИФРОВОЙ ИНТЕРПОЛИРУЮЩИЙ ФИЛЬТР
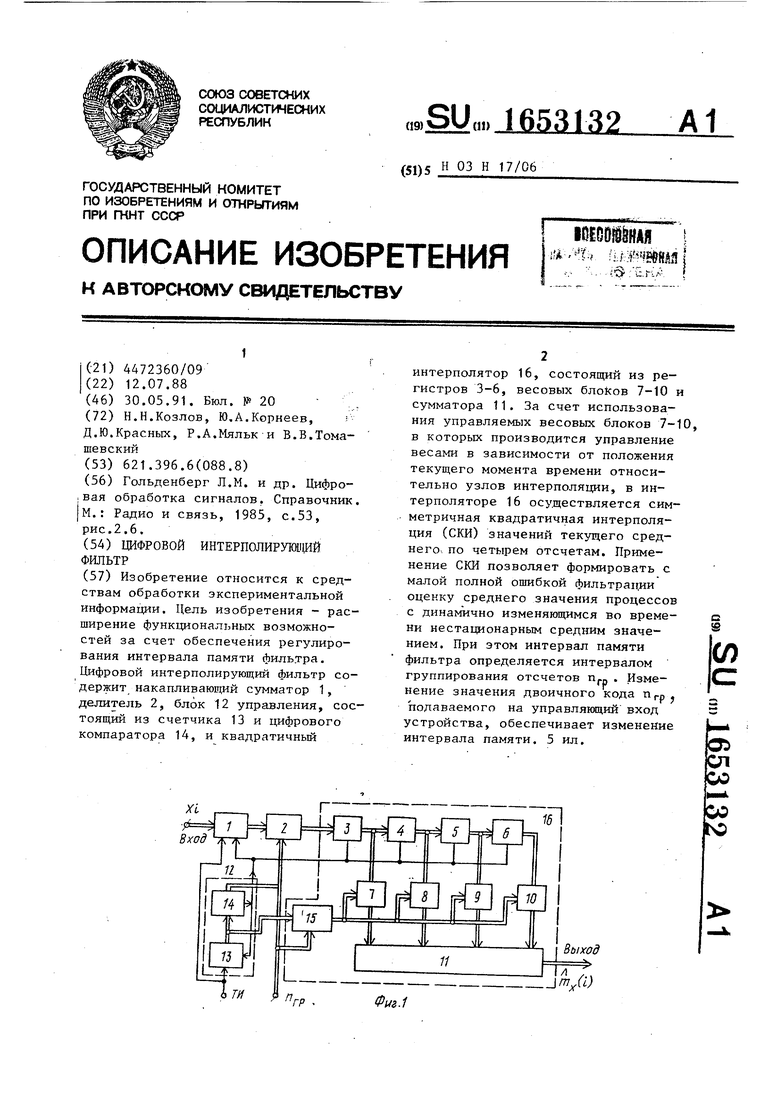
(57)Изобретение относится к средствам обработки экспериментальной информации. Цель изобретения - расширение функциональных возможностей за счет обеспечения регулирования интервала памяти фильтра. Цифровой интерполирующий фильтр содержит накапливающий сумматор 1, делитель 2, блок 12 управления, состоящий из счетчика 13 и цифрового компаратора 14, и квадратичный
интерполятор 16, состоящий из регистров 3-6, весовых блоков 7-10 и сумматора 11. За счет использования управляемых весовых блоков 7-10, в которых производится управление весами в зависимости от положения текущего момента времени относительно узлов интерполяции, в интерполяторе 16 осуществляется симметричная квадратичная интерполяция (СКИ) значений текущего среднего по четырем отсчетам. Применение СКИ позволяет формировать с малой полной ошибкой фильтрации оценку среднего значения процессов с динамично изменяющимся во времени нестационарным средним значением. При этом интервал памяти фильтра определяется интервалом группирования отсчетов пг„ . Изменение значения двоичного кода пгр подаваемого на управляющий вход устройства, обеспечивает изменение интервала памяти. 5 ил.
с 8
(Л
оэ ел
00
. 00
ю
Изобретение относится к средствам обработки экспериментальной информации и может быть использовано при обработке в реальном мае- штабе времени случайных процессов, представляющих собой аддитивную смесь случайной низкочастотной компоненты и дискретного белого (высокочастотного) шума.
Цель изобретения - расширение функциональных возможностей за счет обеспечения регулирования интервала памяти фильтра.
| На фиг. 1 приведена электриче- екая структурная схема цифрового интерполирующего фильтра} на фиг. 2 и 3 - временные диаграммы, поясняющие его работу; на фиг. 4 - пример выполнения весового блока; на фиг.5 - графики функций, реализуемых функциональными преобразователями.
Цифровой интерполирующий фильтр содержит накапливающий сумматор 1, первьй делитель 2, регистры 3-6 с пер вого по четвертый, весовые блоки 7-10 с первого по четвертый, сумматор 11, блок 12 управления, счетчик 13, цифровой компаратор 14, второй делитель 15 и квадратичный интерполятор 16.
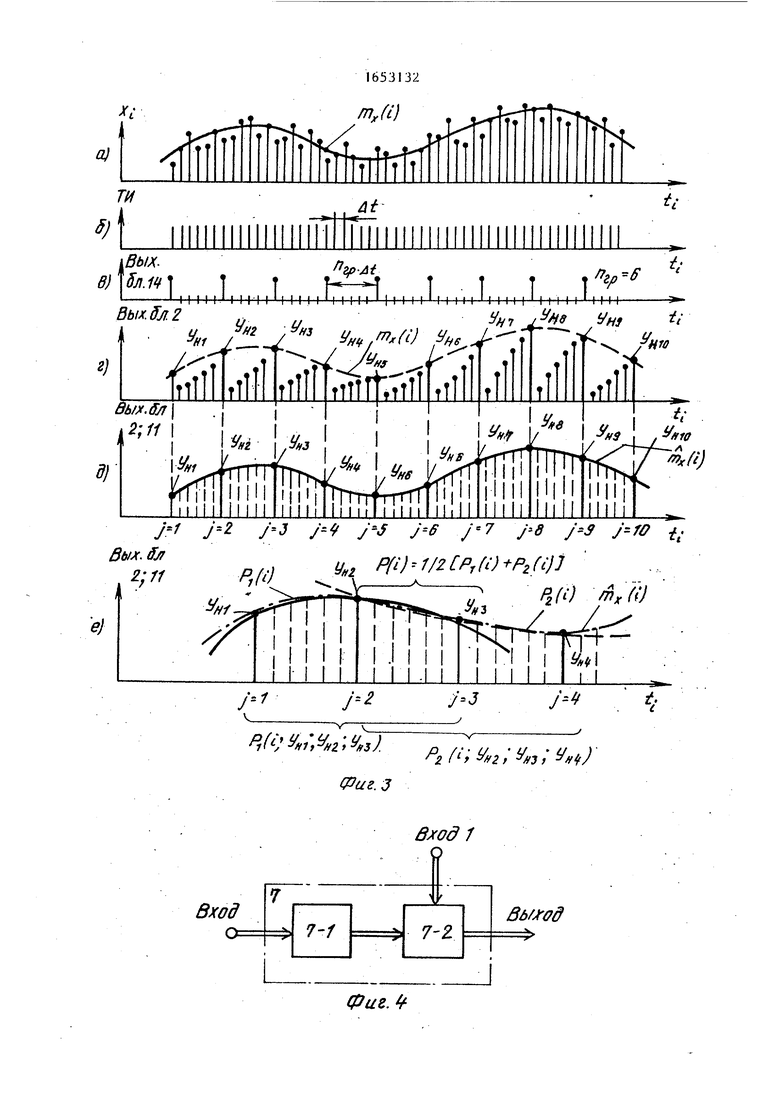
Весовой блок содержит функциональный преобразователь 7-1 и умножитель 7-2.
Цифровой интерполяционный фильтр работает следующим образом.
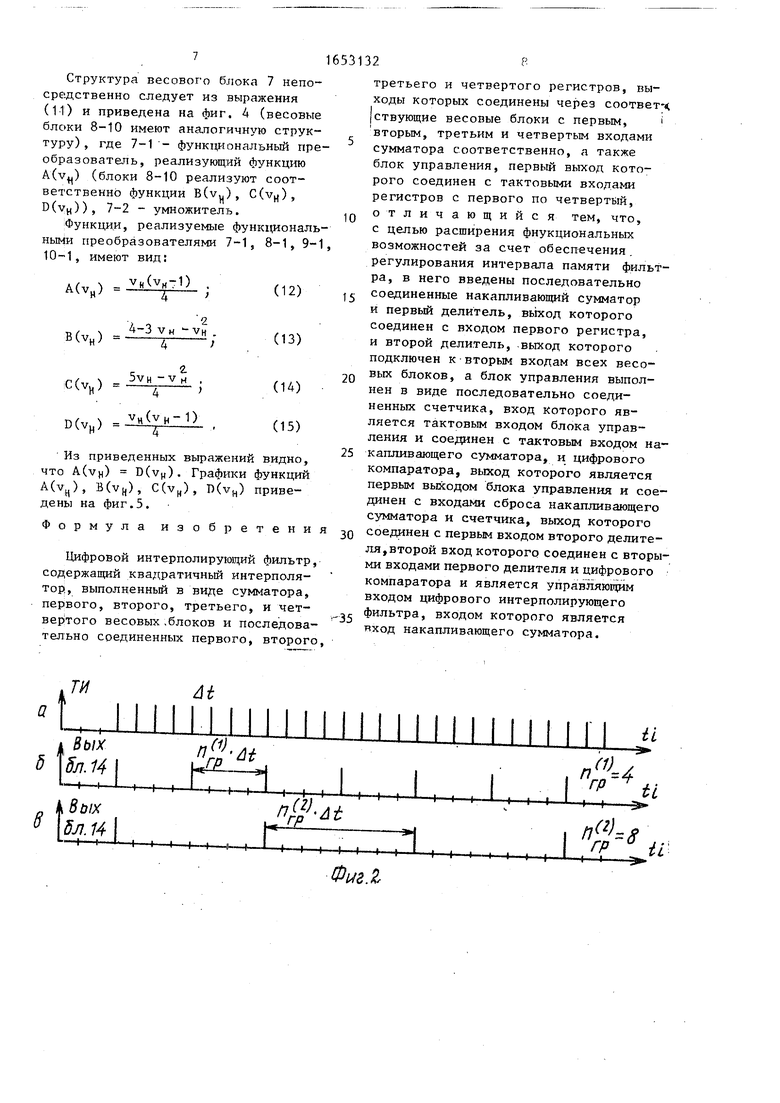
Обрабатываемый процесс |ХЛ в параллельном двоичном коде подается на вход цифрового интерполирующего фильтра (фиг.За). На тактовый вход интерполирующего фильтра подаются тактовые импульсы ТИ (фиг.Зб), определяющие шаг t временной дискретизации входного процесса. Двоичный код, соответствующий длине интервала группирования пг , подается на управляющий вход фильтра, который соединен с вторыми входами первого 2 и второго 15 делителей, цифрового компаратора 14.
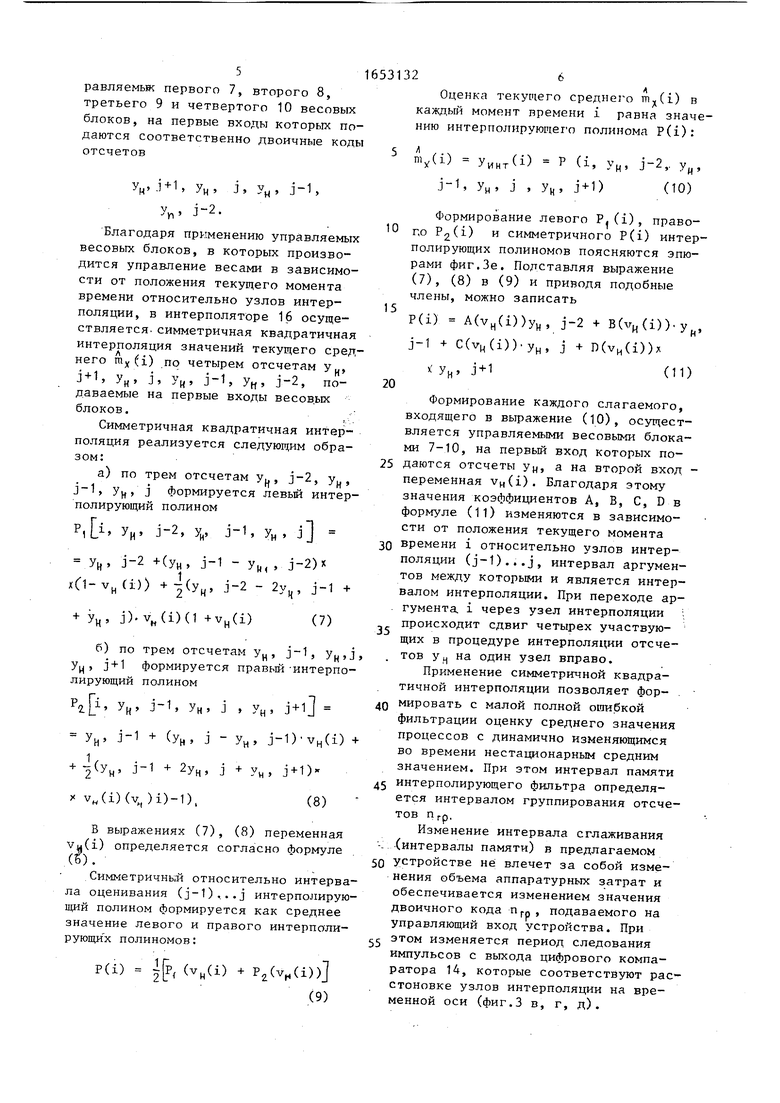
Блоком 12 управления, включающим счетчик 13 и цифровой компаратор 14, формируются импульсы, следующие с периодом пгр &t (фиг.2 б,в, фиг.З в), подаваемые на вход сброса накапливающего сумматора 1 и тактовые входы пер вого 3, второго 4, третьего 5 и чет- вертого 6 регистров.
На выходе накапливающего сумматора 1 на i-том шаге временной дискретизации формируется сумма
v(i)
Umf(,jW
(1)
| И
р)
Текущий i-тый шаг интерполяции (и дискретизации) представляется в виде
1 п
+ v
(2)
rpj у де пгр - интервал группирования,
j - номер ближайшего узла интерполяции, расположенного слева от текущего интервала временной дискретизации;
v - номер текущего интервала
дискретизации, отсчитываемый от ближайшего (слева) узла интерполяции:
(3) где Е(«) - целая часть числа.
На выходе первого делителя 2 . формируются нормированные значения (фиг.З г):
УН(1)
1
(4)
1- y(i)
Пгр
В интервалах дискретизации, соответствующих узлам интерполяции, на выходе первого делителя 2 формируются отсчеты (фиг.З г):
и.,
(i)4i
ГР
yi
ГР
(5
, формикоторые по синхроимпульсам руемым на выходе цифрового компаратора 14 (фиг.Зв), записываются в первый 3, второй 4, третий 5 .и четвертый 6 регистра (при этом последовательно соединенные регистры .3-6 образуют регистр рдвига).
Синхроимпульсы на выходе цифрового компаратора 14 (фиг.Зв) формируются в интервалах дискретизации, соответствующих узлам интерполяции.
Код переменной v формируется на выходе счетчика 13. На выходе второго делителя 15 формируются коды нормированных значений переменной
vH(i)
у;
п
1
гр Гр
-E(-i-) пгр
(6)
Коды переменной vH(i) подаются на вторые (управляющие) входы управляемьк первого 7, второго 8, третьего 9 и четвертого 10 весовых блоков, на первые входы которых подаются соответственно двоичные коды отсчетов
V Уц J УН У„, J-2.
Благодаря применению управляемых весовых блоков, в которых производится управление весами в зависимости от положения текущего момента времени относительно узлов интерполяции, в интерполяторе 16 осуществляется симметричная квадратичная интерполяция значений текущего среднего mx(i) по четырем отсчетам УН, J + 1, Ун, J, Ун, J-1, Ун, J-2, подаваемые на первые входы весовых блоков.
Симметричная квадратичная интерполяция реализуется следующим образом:
а) по трем отсчетам у.,, j-2, ун , J-1 УН J формируется левый интерполирующий полином
P,i, Уи, J-2, У„, J-1, Ун . j
УИ, J-2 + Уи. J-1 - Ум,. х(1-v,(i)) + (ун, j-2 - 2ун, J-1 +
+ УН J) VH(i)(1 +vH(i)
(7)
f) по трем отсчетам ун, j-1, ун,.1, Уц J + 1 формируется правый-интерполирующий полином
, Ун, J-1, Ун.J УН J + 1J
Уи, j-1 + (ун, j- ун, j-D-vH(i) +
+ (Ун. J-1 + 2ун,j + уи, J+D- х vH(i)(4| )i)-1),(8)
В выражениях (7), (8) переменная Vu(i) определяется согласно формуле (В).
Симметричный относительно интервала оценивания (j-1)...j интерполирующий полином формируется как среднее значение левого и правого интерполирующих полиномов:
P(i) JJP, (vM(i) + P2(v(i))
(9)
1653132«
л ... Оценка текущего среднего (.i; в
кажд,ый момент времени i равна значению интерполирующего полинома P(i):
5 mx,(i) УИНТО) Р (i, УН, j-2, ун, J-1, У„, J , УН. J + 1 1°)
0
5
0
5
0
5
0
5
0
5
Формирование левого Р,(i), правого P2(i) и симметричного P(i) интерполирующих полиномов поясняются эпюрами фиг.Зе. Подставляя выражение (7), (8) в (9) и приводя подобные члены, можно записать
P(i) A(vH(i))vH, j-2 + B(vH(i)).yM, j-1 + C(vM(i)) yH, j -f D(vH(i))x
Ун, J + 1CD
Формирование каждого слагаемого, входящего в выражение (10), осуществляется управляемыми весовыми блоками 7-Ю, на первый вход которых подаются отсчеты ун, а на второй вход - переменная VH(I). Благодаря этому значения коэффициентов А, В, С, D в формуле (11) изменяются в зависимости от положения текущего момента времени i относительно узлов интерполяции (J-O...J, интервал аргументов между которыми и является интервалом интерполяции. При переходе аргумента i через узел интерполяции происходит сдвиг четырех участвующих в процедуре интерполяции отсчетов уч на один узел вправо.
Применение симметричной квадратичной интерполяции позволяет формировать с малой полной ошибкой фильтрации оценку среднего значения процессов с динамично изменяющимся во времени нестационарным средним значением. При этом интервал памяти интерполирующего фильтра определяется интервалом группирования отсчетов Пгр,
Изменение интервала сглаживания (интервалы памяти) в предлагаемом устройстве не влечет за собой изменения объема аппаратурных затрат и обеспечивается изменением значения двоичного кода пГр, подаваемого на управляющий вход устройства. При этом изменяется период следования импульсов с выхода цифрового компаратора 14, которые соответствуют рас- стоновке узлов интерполяции на временной оси (фиг.З в, г, д).
Структура весового блока 7 непосредственно следует из выражения (11) и приведена на фиг. 4 (весовые блоки 8-10 имеют аналогичную структуру) , где 7-1 - функциональный преобразователь, реализующий функцию A(vH) (блоки 8-10 реализуют соответственно функции B(v), C(vrt), D(vH)), 7-2 - умножитель.
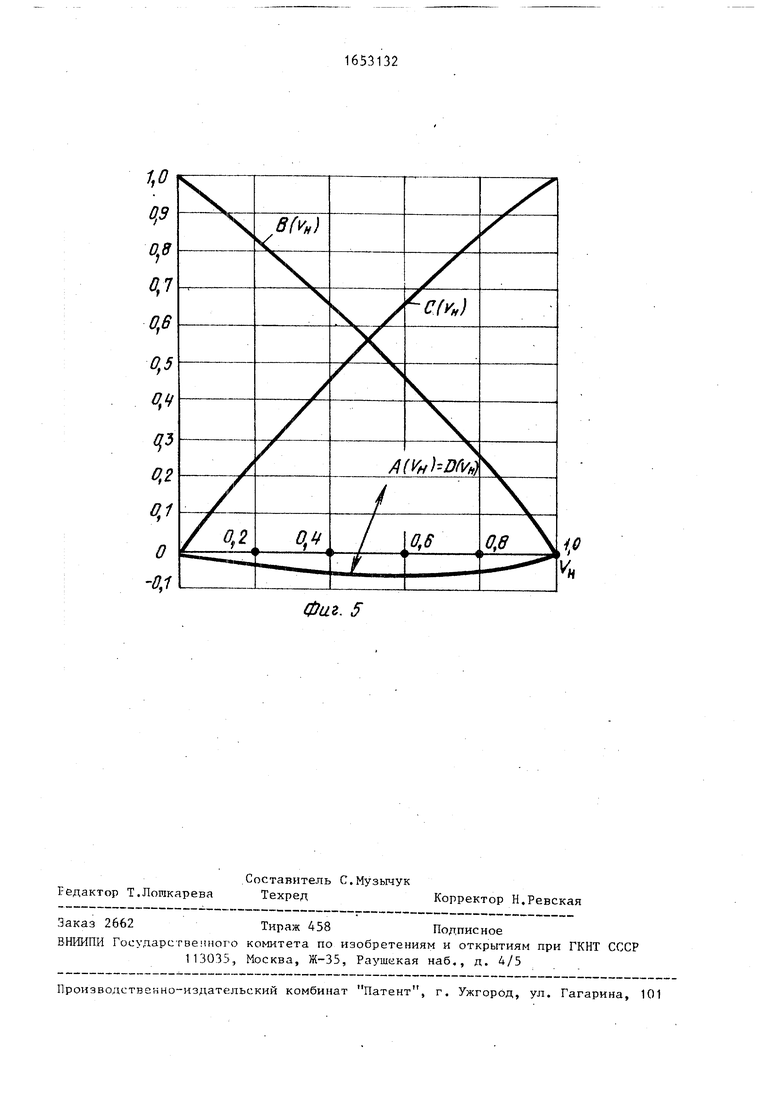
Функции, реализуемые функциональными преобразователями 7-1, 8-1, 9-1, 10-1, имеют вид:
..;
Ј.
4-3 v н - VH .
5;
2.
5vH -VH . ,
VH (v и 1) 5
(12) (13)
(14) (15)
Из приведенных выражений видно, что A(vH) D(vH). Графики функций A(vH), B(vH), C(vH), D(vh) приведены на фиг.5. Формула изобретени
Цифровой интерполирующий фильтр, содержащий квадратичный интерполятор, выполненный в виде сумматора, первого, второго, третьего, и четвертого весовых блоков и последовательно соединенных первого, второго,
5
0
третьего и четвертого регистров, выходы которых соединены через соответч ствующие весовые блоки с первым, вторым, третьим и четвертым входами сумматора соответственно, а также блок управления, первый выход которого соединен с тактовыми входами регистров с первого по четвертый, отличающийся тем, что, с целью расширения фнукциональных возможностей за счет обеспечения регулирования интервала памяти фильтра, в него введены последовательно соединенные накапливающий сумматор и первый делитель, выход которого соединен с входом первого регистра, и второй делитель, выход которого подключен к вторым входам всех весовых блоков, а блок управления выполнен в виде последовательно соединенных счетчика, вход которого является тактовым входом блока управления и соединен с тактовым входом накапливающего сумматора, и цифрового компаратора, выход которого является первым выходом блока управления и соединен с входами сброса накапливающего сумматора и счетчика, выход которого соединен с первым входом второго делителя,второй вход которого соединен с вторыми входами первого делителя и цифрового компаратора и является управляющим входом цифрового интерполирующего фильтра, входом которого является яход накапливающего сумматора.
0
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой адаптивный линейный интерполятор | 1982 |
|
SU1095189A1 |
| Цифровой нерекурсивный фильтр | 1990 |
|
SU1786638A1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2141737C1 |
| Амплитудно-импульсный функциональ-Ный пРЕОбРАзОВАТЕль | 1979 |
|
SU842853A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1981 |
|
SU984032A1 |
| Устройство для восстановления непрерывных функций по дискретным отсчетам | 1983 |
|
SU1125632A1 |
| Нерекурсивный цифровой фильтр-дециматор | 1986 |
|
SU1354394A1 |
| Устройство для выполнения преобразования Фурье | 1980 |
|
SU928363A1 |
| Корреляционный фильтр | 1982 |
|
SU1072251A1 |
ТИ
Ai
Фм.1
/ 0охд
.(fi ..
()d+((jd fi
V 9-f L-f 9-f f-.f b--f c-S z-f
V
OlH,
p
/f .
. f.Mfi 6Hfi
i i . i j. it / Ji
WXI4Q
Ъ
HjT a,/
(г
Zirgwg
;
1 I I I i I I I I I i I I I I I I I I M I M I I I I I I I I I I I t I I | I I I M | I И И i1
7 j
IIIIIIIIIIIIIIIIIINIIIINIIIII
7;
п
С 277$
WWfiWd
-Л.
#
уухюд
I ;/.
WXI4Q
(г
Zirgwg
i1
I
7
/w
РВРШ
() ш
to
x
;rif.54i
Фаг. 5
