Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания движущихся объектов.
Цель изобретения- повышение производительности способа за счет определения параметров колебаний помех и их компенсации.
Поставленная цель достигается тем, что согласно способу, заключающемуся в перемещении объекта по измерительному участку, выполнении N измерений сигналов Si датчиков веса, начало и конец которых определяют по сигналам двух путевых датчиков, подавлении высокочастотных составляющих путем аналоговой фильтрации, оцифровывании, занесении в оперативное запоминающее устройство кодов, пропорциональных сигналам Si датчиков веса и их суммировании, вычитании кода синтезированной первой гармоники из кода измеренного сигнала и интегрировании кодов, пропорциональных сигналам датчиков веса, измеряют временной интервал перемещения объекта по измерительному участку между сигналами двух путевых датчиков, определяют скорость движения объекта, по которой определяют интервал дискретизации ЛТ отсчетов N, снимаемых с датчиков веса, выполняют цифровую фильтрацию, определяют среднее значение So по отсчетам сигнала Si и коды, пропорциональные отклонениям i Si-So, образуют коды, пропорциональные суммам уо+1) + у(м) для ,...N-1, вычисляют коэффициенты пропорциональности QJ для ,...m, где m - число составляющих динамической помехи, определяют значение частот Wi,W2....Wm и
оо О О
о ю
получают искомое значение веса движущегося объекта по расчетной формуле.
Предложенный способ позволяет определить параметры существующих колебаний в тренде измеренного сигнала, восстановить эти колебания, автоматически компенсировать их и по уже очищенному сигналу путем усреднения получить вес объекта.
При измерении веса движущихся ооъек- тов возникает задача отделения постоянной составляющей сигнала, определяемой весом объекта, от переменных составляющих, определяемых колебаниями объекта. При этом время измерения ограничено сверху физическими размерами измерительного участка и необходимостью повысить производительность системы измерения веса, т.е. повысить скорость движения объекта через измерительный участок. Так«при длине платформы для поосного взвешивания железно- дор ожных составов 1,4 м, что ограничивается расстоянием между осями вагонов, и низшей частоте помехи 2 Гц скорость движения объекта не должна превышать 1,5 м/сек. Следует отметить также, что спектр колебаний движущихся объектов сосредоточен в областях 2...5 и 20...40 Гц в силу резонансных явлений в устройствах подвески и амортизации. При таких условиях помехи могут быть описаны ограниченным числом гармонических колебаний. В результате сигнал с датчиков веса, установленных на измерительном участке, представляется следующей функциональной зависимостью
m R(t) g AjCOs(Wj-t)+
m
+ У BjSin(Wj.t)},(1) j 1
где Р - истинный вес объекта;
Wj - частоты гармонических колебаний движущегося объекта;
AJ.BJ - коэффициенты, определяющиеся амплитудой и фазой колебаний с частотой Wj;
F - известная передаточная функция измерительного участка и датчиков веса, определяемая их конструкцией и физическими принципами реализации.
Известно, что колебательные составляющие эффективно подавляются лишь в случае, когда в интервал измерения укладывается не менее двух периодов. В то же время резонансные частоты амортизирующих средств лежат в интервале единиц Герц. Таким образом, это требование вынуждает использовать измерительные участки значительных размеров и снижать скорость объектов по ним, т.е. ведет к удорожанию систем измерения веса и снижает их производительность.
Сущность способа заключается в том, что объект перемещается по измерительному участку, перед которым расположены два путевых датчика на заданном расстоянии друг от друга. По временному интервалу
между сигналами этих двух датчиков определяют скорость движения объекта v, а по ней - время нахождения объекта на измерительном участке, интервал дискретизации между отсчетами, снимаемыми сдатчика веса, установленного на измерительном участке. Сигнал с датчика веса фильтруют аналоговым фильтром НЧ с целью ограничения полосы частот шумов и помех, оцифро- вывают с частотой дискретизации,
превышающей частоту Найквиста для аналогового фильтра НЧ. Из полученных отсчетов выбирают заданное число равноотстоящих отсчетов с интервалом дискретизации AT, определяемом по скорости движения v из выражения:
2 ж 2 L Д T/v const,(2) где л- константа;
L - длина измерительного участка; const-заданная константа.
Вычисляют среднее значение S0 по всем N отсчетам сигнала Si, вычисляют разности для всех ,.,.N. Затем вычисляют суммы Yj+j+Yi-j для ,N-j. Определяют параметры QJ исходя из минимума функционала:
N -m m„
2 Л2« Qj Yk+j+Yk-j -sk}2. (3)
k m + 1 j I
Число параметров Qj определяется чис- лом гармонических составляющих колебаний т, включенных для рассмотрения в модель (1), Полученные оценки используют для определения значений частот Wi,W2,...Wm исходя из выражения
т
2-J Qj-cos(W.JH(4)
Значения частот Wj подставляются в выражение (1). Затем отыскивается минимум
50
функционала:
(5)
minX ,
j-1 где RI - выражения (1) при известных Wj;
Si - отсчеты сигнала с датчиков веса. 5 Минимум выражения (5) дает значения параметров Ро, AJ и BJ, где Ро - приближенное значение искомого веса. Значения этих параметров используются для вычисления значений математической модели R,- и получения точного значения искомого веса Р из выражения:
Nm
L tSrP° X, AjCOS(Wji)- 1
Bj-sin(Wj-i)}/N.(6)
Указанной совокупности отличительных признаков применительно к поставленной цели в известных технических решениях авторами не обнаружено.
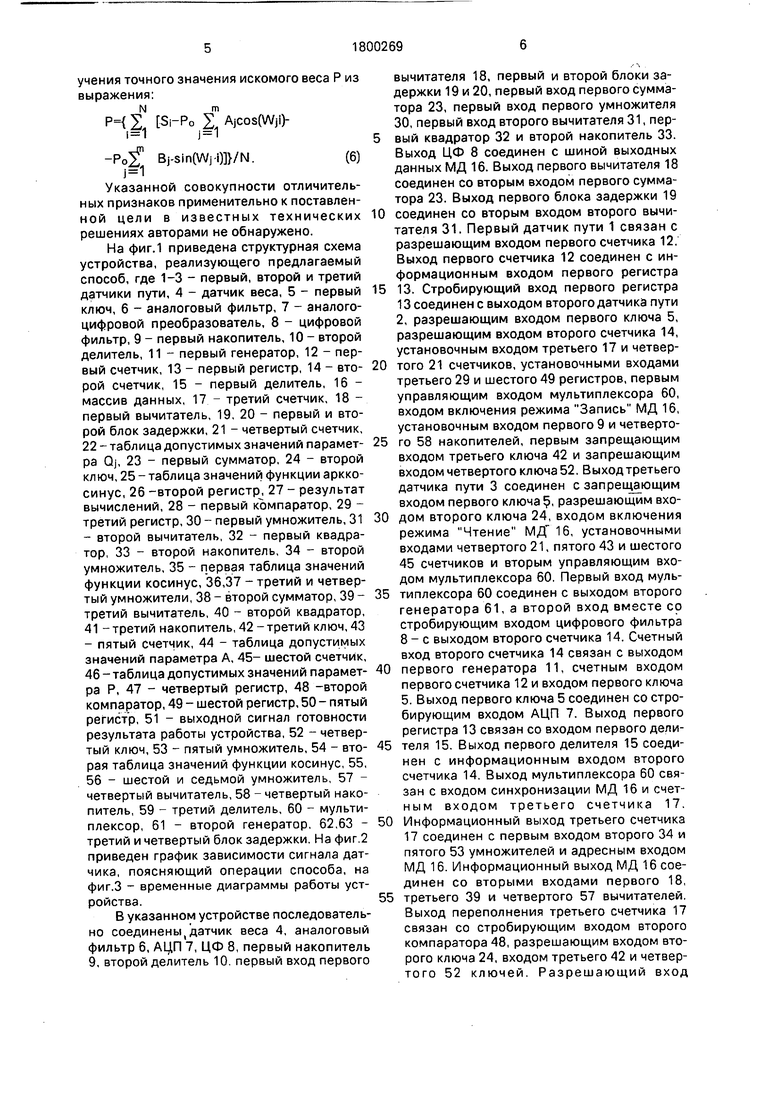
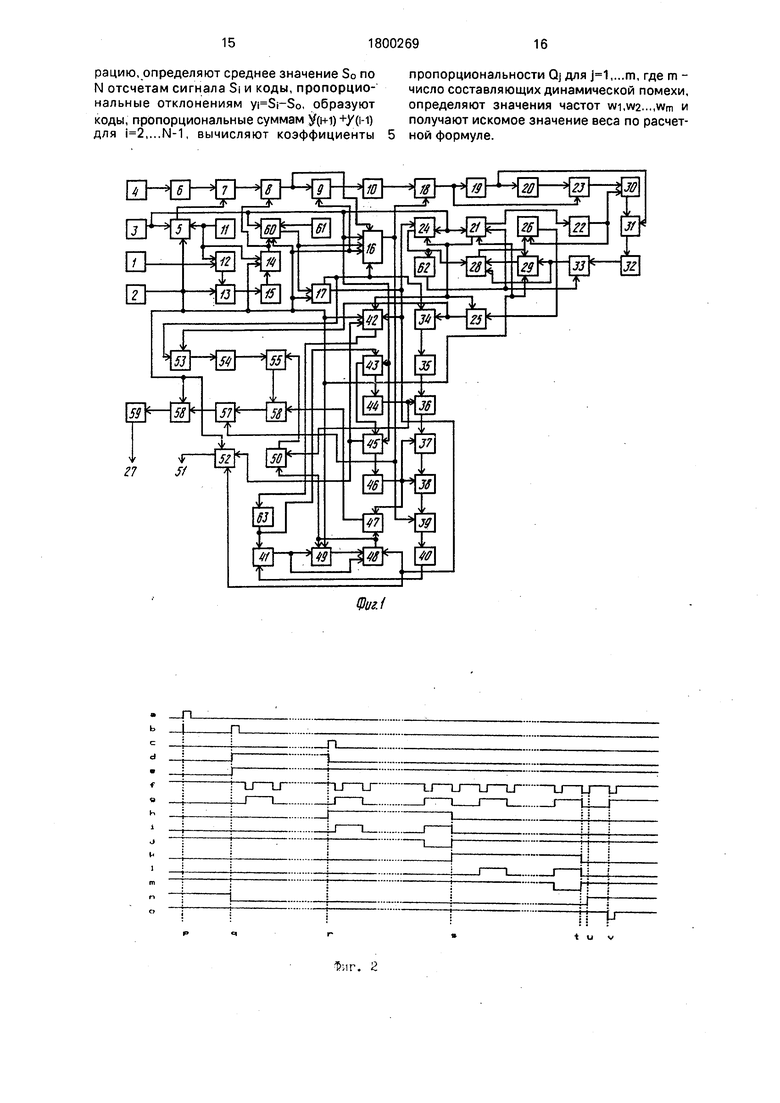
На фиг.1 приведена структурная схема устройства, реализующего предлагаемый способ, где 1-3 - первый, второй и третий датчики пути, 4 - датчик веса, 5 - первый ключ, 6 - аналоговый фильтр, 7 - аналого- цифровой преобразователь, 8 - цифровой фильтр, 9 - первый накопитель, 10 - второй делитель, 11 - первый генератор, 12 - первый счетчик, 13 - первый регистр, 14 - второй счетчик, 15 - первый делитель, 16 - массив данных, 17. - третий счетчик, 18 -. первый вычитатель, 19, 20 - первый и второй блок задержки, 21 - четвертый счетчик, 22 - таблица допустимых значений параметра QJ, 23 - первый сумматор, 24 - второй ключ, 25 - таблица значений функции арккосинус, 26 -второй регистр, 27 - результат вычислений, 28 - первый компаратор, 29 - третий регистр, 30 - первый умножитель, 31
- второй вычитатель, 32 - первый квадратор, 33 - второй накопитель, 34 - второй умножитель, 35 - первая таблица значений функции косинус, 36,37 - третий и четвертый умножители, 38 - второй сумматор, 39 - третий вычитатель, 40 - второй квадратор, 41 -третий накопитель, 42 -третий ключ, 43
- пятый счетчик, 44 - таблица допустимых значений параметра А, 45- шестой счетчик, 46 - таблица допустимых значений параметра Р, 47 - четвертый регистр, 48 -второй компаратор, 49 - шестой регистр, 50 - пятый регистр, 51 - выходной сигнал готовности результата работы устройства, 52 - четвертый ключ, 53 - пятый умножитель, 54 - вторая таблица значений функции косинус, 55, 56 - шестой и седьмой умножитель, 57 - четвертый вычитатель, 58 - четвертый накопитель, 59 - третий делитель, 60 - мультиплексор, 61 - второй генератор, 62,63 - третий и четвертый блок задержки. На фиг.2 приведен график зависимости сигнала датчика, поясняющий операции способа, на фиг.З - временные диаграммы работы устройства.
В указанном устройстве последовательно соединены (датчик веса 4, аналоговый фильтр 6, АЦП 7, ЦФ 8, первый накопитель 9, второй делитель 10. первый вход первого
вычитателя 18, первый и второй блоки задержки 19 и 20, первый вход первого сумматора 23, первый вход первого умножителя 30, первый вход второго вычитателя 31, первый квадратор 32 и второй накопитель 33. Выход ЦФ 8 соединен с шиной выходных данных МД 16. Выход первого вычитателя 18 соединен со вторым входом первого сумматора 23. Выход первого блока задержки 19
0 соединен со вторым входом второго вычитателя 31. Первый датчик пути 1 связан с разрешающим входом первого счетчика 12. Выход первого счетчика 12 соединен с информационным входом первого регистра
5 13. Стробирующий вход первого регистра 13 соединен с выходом второго датчика пути 2, разрешающим входом первого ключа 5, разрешающим входом второго счетчика 14, установочным входом третьего 17 и четвер0 того 21 счетчиков, установочными входами третьего 29 и шестого 49 регистров, первым управляющим входом мультиплексора 60, входом включения режима Запись МД 16, установочным входом первого 9 и четверто5 го 58 накопителей, первым запрещающим входом третьего ключа 42 и запрещающим входом четвертого ключа 52. Выход третьего датчика пути 3 соединен с запрещающим входом первого ключа 5, разрешающим вхо0 дом второго ключа 24, входом включения режима Чтение МД 16, установочными входами четвертого 21, пятого 43 и шестого 45 счетчиков и вторым управляющим входом мультиплексора 60. Первый вход муль5 типлексора 60 соединен с выходом второго генератора 61, а второй вход вместе со стробирующим входом цифрового фильтра 8 - с выходом второго счетчика 14. Счетный вход второго счетчика 14 связан с выходом
0 первого генератора 11, счетным входом первого счетчика 12 и входом первого ключа 5. Выход первого ключа 5 соединен со стробирующим входом АЦП 7. Выход первого регистра 13 связан со входом первого дели5 теля 15. Выход первого делителя 15 соединен с информационным входом второго счетчика 14. Выход мультиплексора 60 связан с входом синхронизации МД 16 и счетным входом третьего счетчика 17.
0 Информационный выход третьего счетчика 17 соединен с первым входом второго 34 и пятого 53 умножителей и адресным входом МД 16. Информационный выход МД 16 соединен со вторыми входами первого 18,
5 третьего 39 и четвертого 57 вычитателей. Выход переполнения третьего счетчика 17 связан со стробирующим входом второго компаратора 48, разрешающим входом второго ключа 24, входом третьего 42 и четвер- того 52 ключей. Разрешающий вход
третьего ключа 42 соединен с выходом переполнения четвертого счетчика 21, строби- рующим входом таблицы функции арккосинуса 25 и входом второго ключа 24. Выход второго ключа 24 связан со строби- рующим входом первого компаратора 28 и входом третьего блока задержки 62. Выход третьего блока задержки соединен с установочным входом второго накопителя 33 и счетным входом четвертого счетчика 21. Вы- ход четвертого счетчика связан со входом таблицы допустимых значений Q 22. Выход таблицы допустимых значений Q 22 соединен со вторым входом первого умножителя 30 и входом второго регистра 26. Синхрони- зирующий вход второго регистра 26 вместе с синхронизирующим входом третьего регистра 29 соединен с выходом первого компа- ратора 28. Первый вход первого компаратора 28 связан с выходом третьего регистра 29. Вход третьего регистра 29 вместе со вторым входом первого компаратора 28 соединен с выходом второго накопителя 33. Выход второго регистра 26 соединен со входом таблицы функции арккосинуса 25. Выход таблицы функции арккосинуса 25 связан с первым входом пятого умножителя 53 и со вторым входом второго умножителя 34. Выход второго умножителя 34 соединен со входом первой таблицы функции косину- са 35. Выход первой таблицы функции косинуса 35 связан с первым входом третьего умножителя 36. Третий умножитель 36 последовательно соединен с первым входом четвертого умножителя 37, с первым входом второго сумматора 38, с первым входом третьего вычитателя 39, с входом второго квадратора 40, со входом третьего накопителя 41, со входом шестого регистра 49 и первым входом второго компаратора 48. Второй вход второго компаратора 48 связан с выходом шестого регистра 49. Синхронизирующий вход шестого регистра 49 вместе с одноименными входами четвертого 47 и пятого 50 регистров соединены с выходом второго компаратора 48. Выход третьего .ключа 42 соединен со входом четвертого блока задержки 63. Выход четвертого блока задержки 63 связан с установочным входом третьего накопителя 41 и счетным входом пятого счетчика 43. Выход пятого счетчика 43 соединен с входом таблицы допустимых значений А 44. Выход таблицы допустимых значений А 44 вместе со вторым входом третьего умножителя 36 связан с входом пятого регистра 50. Выход пятого регистра 50 связан с первым входом шестого умножителя 55. Выход переполнения пятого счетчика 43 соединен со счетным входом шестого счетчика 45. Информационный выход шестого счетчика 45 связан со входом таблицы допустимых значений параметра Р 46. Выход таблицы допустимых значений параметра Р 46 соединен со вторыми входами четвертого умножителя 37 и второго сумматора 38 и входом четвертого регистра 47. Выход четвертого регистра 47 связан с первым входом седьмого умножителя 56. Выход переполнения шестого счетчика 45 соединен со входом четвертого ключа 53 и вторым запрещающим входом третьего ключа 42. Выход третьего ключа 42 связан со вторым входом пятого умножителя 53. Пятый умножитель 53 последовательно соединен с входом второй таблицы функции косинуса 54, со вторым входом шестого умножителя 55, со вторым входом седьмого умножителя 56, со вторым входом четвертого вычитателя 57, с входом четвертого накопителя 58 и с входом третьего делителя 59. Выход третьего делителя 59 содержит искомое значение определяемой величины веса движущегося объекта 57. Выход четвертого ключа 52 сигнализирует об окончании процесса измерения (сигнал 51).
Пример. Путевые датчики 1-3 - серийно выпускаемые промышленностью типа БВК, датчик веса 4 - могут быть любыми датчиками (тензометрическими, меха- нотронными, фотоэлектрическими и т.д.), Ключи 5,24, 42 и 52 - выполнены на логических элементах со стробированием и RS- триггером для хранения состояний на микросхемах (МС) серии К155. Аналоговый фильтр 6 - на операционном усилителе К544УД2. АЦП 7 - 1108ПВ1. Цифровой фильтр 8 - на умножителях и сумматорах по блок-схеме из А.А.Петровский. Методы и микропроцессорные средства обработки широкополосных и быстродействующих процессов в реальном времени. 1988, Минск, стр.72, Накопители 9, 33., 41 и 58 - сумматоры и регистры на МС серии К155, К555. Делители 10, 15 и 59 - на МС КР1802ВР2. Генераторы 11 и 61 - на МС серии , К555, К500, Счетчики 12.14,17,21,43 и 45 МС К555ИЕ7. Регистры 13, 26, 29, 47, 49 и 50 - МС К555ИР22. Массив данных 16 - на МС серии КР537РУ10, К555. Вычитатели 18, 31, 39 и 57 - на сумматорах серии К155, К555. Блоки задержки 19 и 20 - на регистрах серии КР555. Блоки задержки 62 и 63 - на PC - цепях и логических элементах серии К155. Сумматоры 23 и 38 - МС серии К555. Таблицы допустимых значений параметров 22,44 и 46 и значений функций 25, 35 и 54 - на программируемых микросхемах серии КР556. Квадраторы 32 и 40 - умножители МС КР1802ВР2 и регистры
серии КР555. Цифровые компараторы 28 и 48-МСК555СП1.
Работает устройство следующим образом, Путевые датчики 1 и 2 установлены- перед измерительным участком, причем путевой датчик 1 на некотором расстоянии перед участком, а 2 - непосредственно перед началом измерительного участка. При проезде движущимся объектом первого путевого датчика 1 вырабатывается сигнал (фиг,2а, момент времени р), устанавливающий первый счетчик 12 в начальное состояние. С этого момента первый счетчик 12 начинает счет импульсов первого генератора 11 и продолжает до прихода сигнала со второго путевого датчика 2 (фиг.2Ь, момент времени q), по которому содержимое первого счетчика 12 переписывается в первый регистр 13 (фиг.2е), первый ключ 5 включается на пропускание импульсов первого генератора 11 к АЦП 7 для синхронизации преобразования аналогового сигнала в цифровой код. Импульс второго путевого датчика 2 устанавливает также счетчики 14, 17, 24 в начальное состояние, регистры 29 и 49 - в единичное состояние, соответствующее максимальному значению числа, хранимого в них, накопители 9 и 58 - в нулевое состояние, ключи 42 и 52 - в запрещающее состо- яние, в котором они не пропускают импульсы, массив данных 16(МД)- в режим Запись, мультиплексор 60 - в состояние (фиг.2с1), коммутирующие частоты со второго счетчика 14 на счетный вход третьего счетчика 17 и синхронизирующий вход МД 16. До преобразования в АЦП 7 аналоговый сигнал с датчика веса 4 проходит аналоговый фильтр низких частот 6 для уменьшения ширины полосы частот и повышения отношения сигнал/шум. Преобразование происходит с частотой, превышающей частоту Найквиста аналогового фильтра. Цифровой код поступает в цифровой фильтр низкой частоты 8 с регулируемой полосой среза fc. который отфильтровывает колебания, число периодов которых превышает два. Значение полосы среза определяется выбором частоты дискретизации ЛТ в зависимости от содержимого первого регистра 13 в соответствии с рекомендациями (Петровский А.А. Методы и микропроцессорные средства обработки широкополосных и быстродействующих процессов в реальном времени. - Минск, 1988. с.72), по которым необходимо выполнение выражения (2). Там же приведена структурная схема реализации цифрового фильтра на умножителях и сумматорах. Требуемая частота дискретизации получается из частоты первого генератора 11 делением вторым счетчиком 14 на
коэффициент, заданный первым делителем 15. Первый делитель 15 определяет величину, обратную значению скорости, полученному в первом регистре 13, и прямо
пропорциональную заданной константе. Значение константы зависит от длины измерительного участка, скорости движения объекта, которые определяют длительность интервала измерения, и числа снимаемых
0 отсчетов N. Через мультиплексор 60 частота стробирует работу цифрового фильтра 8 и приходит на счетный вход третьего счетчика 17 (фиг.2т), который перебирает адресное поле МД 16 (фиг.2д), и на вход синхрониза5 ции МД 16 для записи данных с ЦФ 8. В процессе снятия данных с ЦФ 8 данные накапливаются путем суммирования в первом накопителе 9 и после деления на заданное число выборок во втором делителе 10
0 получается среднее значение текущей переменной на интервале измерения. Весь процесс снятия данных с датчика веса 4, пока объект находится на измерительном участке, длится до сигнала с путевого датчика 3
5 (фиг.2с, момент времени г), который расположен в самом конце измерительного участка. По этому сигналу первый ключ 5 прекращает подачу импульсов на АЦП 7, мультиплексор 60 переключает на счетный
0 вход третьего счетчика тактовую частоту второго генератора 61 (фиг.2п), обеспечивающую максимальное быстродействие работы устройства, и разрешает второму ключу 24 пропускание импульсов переполнения с третьего
5 счетчика 17, а также устанавливает МД 16 в режим Чтение данных. С этого омента третий счетчик 17 начинает счет импульсов, перебирая адресное поле МД 16, на выходную шину которого поступают полученные дан0 ные, Они вычитаются из среднего значения, полученного во втором делителе 10 и задерживаются на два такта блоками задержки 19 и 20. Первый сумматор 23 суммирует (i+1)-e значение с (Ы)-м, а в первом умножителе 30
5 сумма перемножается на значение параметра Q, которое выбирается из таблицы допустимых значений 22. Произведение вычитается вторым вычитателем 31 из i-ro значения, разность возводится в квадрат первым
0 квадратором и накапливается во втором накопителе. Вычитатель представляет собой сумматор, в котором значение одного из слагаемых представляется в обратном коде. Квадратор - умножитель числа самого на
5 себя. Процесс выполняется до тех пор, пока третий счетчик 17 не переберет все значения адресного поля МД 16, после чего он вырабатывает сигнал переполнения. Поэтому сигналу, прошедшему через второй ключ 24, первый компаратор 28 сравнивает значения во втором накопителе 33 и в третьем регистре 29. Если значение во втором накопителе 33 меньше, чем в третьем регистре 29, то первый компаратор 28 вырабатывает импульс, по которому значения параметра Q, выбранные в этот момент из таблицы допустимых значений 22, заносятся во второй регистр 26, а значение из второго накопителя 33 - в третий регистр 29. Этот же импульс переполнения третьего счетчика 17 через блок задержки 62, в котором задерживается на время, достаточное для срабатывания первого компаратора 28 и второго 26 и третьего регистров 29, поступает на счетный вход четвертого счетчика 21. Четвертый счетчик 21 перебрасывается в новое состояние и выбирает новое значение параметра Q из таблицы допустимых значений 22 (фиг.21). Цикл повторяется до нового переполнения третьего счетчика 17. Таким образом происходит работа этих блоков устройства до завершения перебора всех значений параметра Q. При этом во втором регистре оказывается значение параметра Q, соответствующее минимальному значению суммы, накопленной вторым накопителем 33 из всех его значений. По окончании этого цикла четвертый счетчик 21 вырабатывает сигнал переполнения (фиг.2), по которому второй ключ 24 закрывается (фиг.2Ь), а третий ключ 42 открывается (фиг,2к), момент времени S). Этот же импульс разрешает таблице значений функции арккосинус 25 установитьзначение функции, соответствующее значению параметра во втором регистре 26. В новом цикле перебора адресного поля МД 16 третьим счетчиком 17 его информационный выход поступает также на второй умножитель 34, где умножается на значение частоты, поступающее из таблицы функции арккосинуса 25. Произведение подается в первую таблицу функции косинуса 35, выходное значение которой подается на третий умножитель 36 и умножается на значение параметра А, взятое из таблицы допустимых значений этого параметра 44. Выбираемое значение параметра А определяется состоянием пятого счетчика 43. Результат из третьего умножителя 36 поступает на четвертый умножитель 37, где умножается на значение параметра Р, выбранное из таблицы допустимых значений этого параметра 46, которое задается состоянием шестого счетчика 45 (фиг.21). Произведение во втором сумматоре 38 складывается с тем же значением параметра Р. Из полученной суммы в третьем вычитателе 39 вычитается текущее значение измеренных данных, считываемое из МД 16. Разность возводится в квадрат вторым
квадратором 40 и канапливается в третьем накопителе 41. Завершение перебора адресного поля МД 16 третьим счетчиком 17 определяется очередным его сигналом переполнения, который поступает на второй компаратор 48. По этому сигналу второй компаратор 48 сравнивает значения в третьем накопителе 41 и в шестом регистре 49. Если значение в третьем накопителе 41 ока0 зывается меньше, то второй компаратор 48 вырабатывает сигнал, по которому значение из третьего накопителя 41 переписывается в шестой регистр 49, выбранное значение из таблицы допустимых параметров А и Р 5 соответственно в пятый регистр 50 и в четвертый регистр 47. В противном случае перезапись не происходит и значения регистров остаются неизменными. Каждый импульс переполнения третьего счетчика 17
0 через открытый третий ключ 42 и четвертый блок задержки 63 поступает на счетный вход пятого счетчика 43, перебрасывая его в новое состояние, и установочный вход третьего накопителя 41, обнуляя его. Время
5 задержки выбирается достаточным для срабатывания второго компаратора 48 и регистров 47, 49 и 50. Перебор всего поля допустимых значений таблицы 44 пятым счетчиком 43 приводит к его переполнению.
0 Импульс переполнения пятого счетчика 43 переводит в новое состояние шестой счетчик 45, который выбирает новое значение параметра Р из таблицы допустимых значений 46. Цикл продолжается до переполне5 ния шестого счетчика 45, который вырабатывает соответствующий импульс, этот импульс разрешает работу четвертого ключа 52 (фиг.2п, момент времени и) и запрещает работу третьего ключа 42 (фиг.2(,
0 момент времени t), после чего начинается последний цикл работы устройства. Значение текущего адреса данных МД 16 умножается на значение частоты с таблицы функции арккосинуса 25 на пятом умножи5 теле, вычисляется значение функции косинуса во второй таблице 54, умножается в шестом умножителе 55 на значение параметра А из пятого регистра 50, умножается на значение параметра Р из четвертого ре0 гистра 47 в седьмом умножителе 56, вычитается из текущего значения измеренных данных в четвертом вычитателе 57, накапливается в четвертом накопителе 58 и делится на выбранное число значений в третьем де5 лителе 59. На выходе получается усредненное значение искомой величины, причем усреднение происходит по значениям, свободным от влияния низкочастотных помех, вызванных колебаниями движущегося объекта. После перебора всего адресного поля
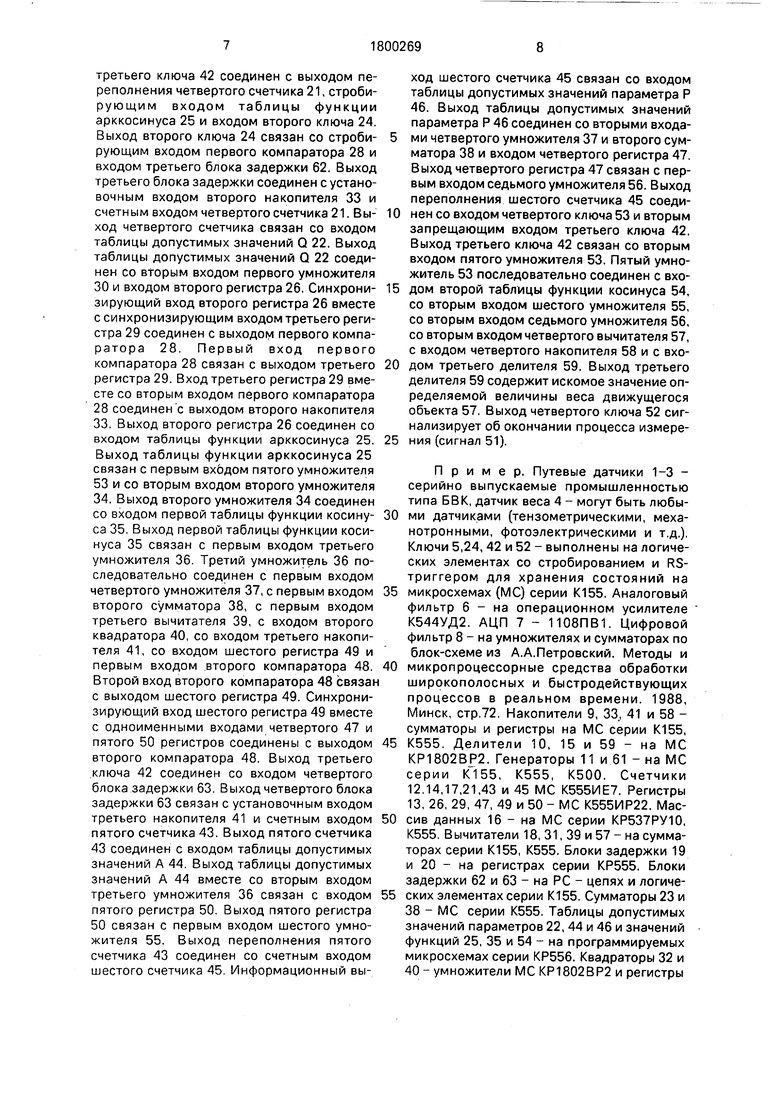
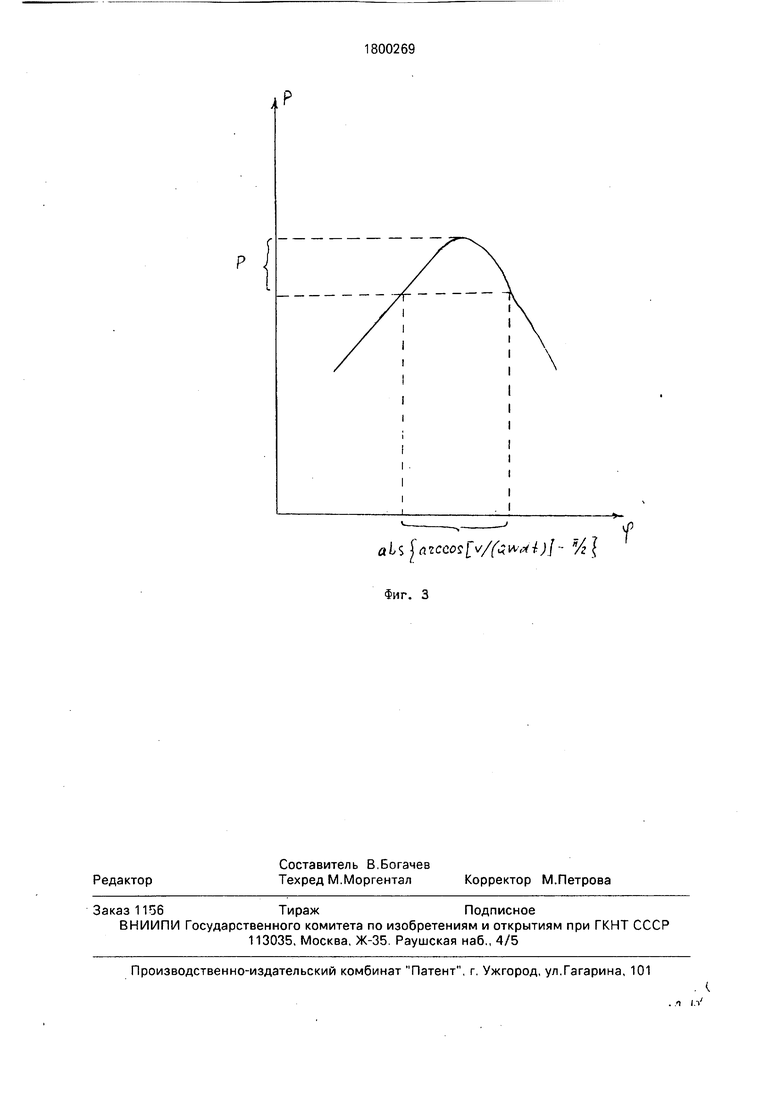
МД 16 сигнал переполнения третьего счетчика 17 проходит через открытый четвертый ключ 52 и устанавливает сигнал о готовности данных 51 (фиг.2о, момент времени v). В заявляемом способе определение веса движущегося объекта осуществляется за интервал времени, значительно меньше, чем требуется для этого в известных способах. Минимизация функционала (5) эквивалентна решению линейной задачи наименьших квадратов. Помехоустойчивость вычисления неизвестных в (5) определяется числом обусловленности матрицы, состоящей из коэффициентов уравнений (6) AJ и Bj. Таким образом, точность восстановления переменных составляющих сигнала определяется входным отношением сигнал/шум, где под шумом понимается аддитивная составляющая, определяемая тепловыми шумами применяемого измерительного устройства, его шагом дискретизации, разрядной сеткой вычислителя и т.д. В худшем случае, изображенном на фиг.З, когда сигнал содержит единственную переменную составляющую, имеющую низшую из возможных частот, изменение сигнала будет минимальным, когда в интервал измерения попадает только экстремум этой частоты. В этом случае сигнал будет описываться функцией R(t)P 1+Qsinwt, а его изменение определяется его производной
-dR(t)R dt PQwcoswt. Приравнивая изменение функции к аддитивной компоненте шума, получим:
PQwcos(wt),
где v, - отношение сигнал/шум на входе применяемого измерительного канала. .
Точки экстремума производной будут расположены при значениях аргумента wt лк/2, гдетг - константа, тогда часть периода низшей частоты, изменение функции в котором сравнимо с аддитивной шумовой компонентой, будет определяться выражением
abs{arccos v/(Qwdt)-7r/2}.
Так, в приведенном в описании изобретения примере получим при низшей частоте 2 Гц, ,2, ,0005 и ,0005, что эта часть периода низшей частоты будет равна 0,324. С другой стороны известно, что увеличение числа измерений в М раз ведет к подавлению шума в корень квадратный из М раз. В нашем примере при числе измерений равном 1000 отношение сигна/шум послепредлагаемой авторами последовательности операций улучшится, по крайней мере в 10 раз и составит 0,0002 по отношению к информативному сигналу (измеряемому весу). Таким образом, максимальная часть длительности периода низшей переменной составляющей равняется в данном примере 100 0,001/0,5+0,,524 длительности периода. Это определяет максимально допустимую скорость движения
объекта, равную
,
где L - длина участка; F - низшая частота; п - необходимая.часть периода низшей частоты, равная 5,24, что более чем в 3 раза выше,
0 чем по известным способам.
Предлагаемое изобретение представляет значительный интерес для народного хозяйства, поскольку позволяет решить комплексные задачи по учету перевозимого
5 груза. Поосный принцип взвешивания снижает металлоемкость весов и затраты на строительство фундаментов для установки платформ. Необходимость увеличения скорости движения транспорта при взвешива0 нии диктуется возрастанием грузопотоков в народном хозяйстве. Известные способы не позволяют качественно отфильтровать помехи при движении объекта на высокой скорости, т.е. обладают низкой
5 производительностью, так как для качественной фильтрации необходимо, чтобы в интервал измерения вкладывалось около двух периодов помехи. Однако период помех имеет значительную длительность. В заяв0 ляемом способе выполнение этого условия не требуется, поэтому скорость движения при той же точности измерения увеличивается. Кроме того, в значительной степени возрастает производительность измери5 тельных операций.
Формула изобретения Способ взвешивания движущихся объектов, заключающийся в перемещении объекта по измерительному участку,
0 выполнении N измерений сигналов Sj датчиков веса, начало и конец которых определяют по сигналам двух путевых датчиков, подавлении высокочастотных составляющих путем аналоговой фильтрации, оцифро5 вывании, занесении в оперативное запоминающее устройство кодов, пропорциональных сигналам Si датчиков веса, и их суммировании, вычитании кода синтезированной первой гармоники из кода измерен0 ного сигнала и интегрировании кодов, пропорциональных сигналам Si датчика веса, отличающийся тем, что, с целью повышения точности за счет определения параметров колебаний помех и их компен5 сации, измеряют временной интервал перемещения объекта по измерительному участку, определяют скорость движения объекта, по которой выбирают интервал дискретизации dT отсчетов N, снимаемых с датчиков веса, выполняют цифровую фильтрацию, определяют среднее значение So попропорциональности QJ для ,...m, где m N отсчетам сигнала Si и коды, пропорцио-число составляющих динамической помехи,
нальные отклонениям , образуютопределяют значения частот wi,W2...,wm и
коды, пропорциональные суммам У(н-1) +У(и)получают искомое значение веса по расчетдля ,...N-1, вычисляют коэффициенты5 ной формуле.
Фиг. З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
| Устройство для контроля температуры | 1988 |
|
SU1515176A1 |
| Устройство для контроля дискретного объекта | 1984 |
|
SU1218398A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
| Устройство для коррекции временных искажений | 1985 |
|
SU1270797A1 |
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1999 |
|
RU2149419C1 |
| РАДИАЦИОННЫЙ ТОЛЩИНОМЕР ПОКРЫТИЙ | 1988 |
|
SU1805736A1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1387173A1 |
Использование: весоизмерительная техника, взвешивание движущихся объектов. Сущность изобретения: выполняют N измерений сигналов Si датчиков веса, производят аналоговую фильтрацию, оцифровывание, занесение в ОЗУ кодов, пропорциональных сигналам Si датчиков веса, суммируют их, вычитают код синтезиро- ванной первой гармоники из кода измеренного сигнала, производят интегрирование кодов, измеряют интервал перемещения объекта по измерительному участку, определяют скорость движения объекта, по которой выбирают интервал дискретизации, выполняют цифровую фильтрацию, ус- редняют,определяют коды, пропорциональные отклонениям yi Si-So, где So - среднее значение по N отсчетам сигнала Si, образуют коды, пропорциональные суммам у(1+1)+У(м) для ,..N-1, вычисляют коэффициенты пропорциональности QJ для ,...m, где m - число составляющих динамической помехи, определяют значения частот Wi,...Wm и получают искомое зна- чение веса движущегося объекта по расчетной формуле. 3 ил.
| Ивахненко А,Г., Юрачковский Ю.П | |||
| Моделирование сложных систем по экспериментальным данным | |||
| - М.: Радио и связь, 1987.С | |||
| Горный компас | 0 |
|
SU81A1 |
| Приборы и системы управления | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
