Ё

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электрошлаковой сварки, наплавки и переплава | 1985 |
|
SU1731536A1 |
| Многопозиционная машина для производства трубчатых изделий из полимеров | 1984 |
|
SU1335480A1 |
| Лазерный бронхоскоп | 1989 |
|
SU1699439A1 |
| Технологическая линия для изготовления теплоизоляционных материалов | 1990 |
|
SU1787792A1 |
| СИСТЕМА ПОДЪЕМНИКОВ В ЗДАНИИ, ИМЕЮЩЕМ, ПО МЕНЬШЕЙ МЕРЕ, ОДИН ПЕРЕСАДОЧНЫЙ ЭТАЖ | 2007 |
|
RU2493092C2 |
| ПОВОРОТНОЕ УСТРОЙСТВО ДЛЯ СОЛНЕЧНОГО ЭНЕРГОМОДУЛЯ | 2007 |
|
RU2381426C2 |
| АГРОПРОМЫШЛЕННЫЙ АГРЕГАТ | 2005 |
|
RU2289900C1 |
| Установка для термоциклирования образцов материалов | 1986 |
|
SU1427234A1 |
| Агромост с широкозахватными платформами | 1990 |
|
SU1764532A1 |
| АГРОМОСТ | 1997 |
|
RU2114524C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к мостовым агрегатам для сельскохозяйственных работ. Цель изобретения - автоматичеекая корректировка курсового движения в прямоугольной сетке координат. Устройство содержит центральную тележку 1, модули 2-4, водовод 5, ультразвуковые измерители 6 угла, измерители 7 линейности. Если при движении агромоста симметричность расстояния между ультразвуковым измерителем 6 и водоводом 5 нарушается, то срабатывает электродвигатель докрутки колес центральной тележки 1, что и позволяет восстановить симметричность расстояния. Выравнивание модулей 2-4 вдоль оси Х-Х осуществляется путем регулировки скоростей их приводных электродвигателей с помощью аппаратуры системы управления 1 з.п.ф-лы, 7 ил.
Изобретение относится к сельскохозяйственному машиностроению, в частности к мостовым агрегатам для сельскохозяйственных работ.
Цель изобретения - автоматическая корректировка курсового движения в прямоугольной сетке координат.
,На фиг. 1 показан многомодульный мостовой агрегат, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - измеритель линейности; на фиг. 4 - схема автоматического управления агромоста в прямоугольной системе координат; на фиг. 5 - кинематическая схема привода колеса центральной тележки; на фиг. 6 - разрез А-А на фиг. 5; на фиг. 7 - принципиальная электрическая силовая схема системы передвижения центральной тележки.
Агромост представляет собой устройство, сбдержащее центральную тележку 1 и модули 2, 3, 4 (фиг. 1). Центральная тележка
1 установлена над водоводом 5. На опорах центральной тележки 1 закреплены ультразвуковые измерители 6 угла, измеряющие расстояние между водоводом 5 и опорами центральной тележки 1. На сочленениях между модулем 2 и центральной тележкой 1 и модулем 4 и центральной тележкой 1, а также между модулями 2 и 3 установлены измерители линейности 7.
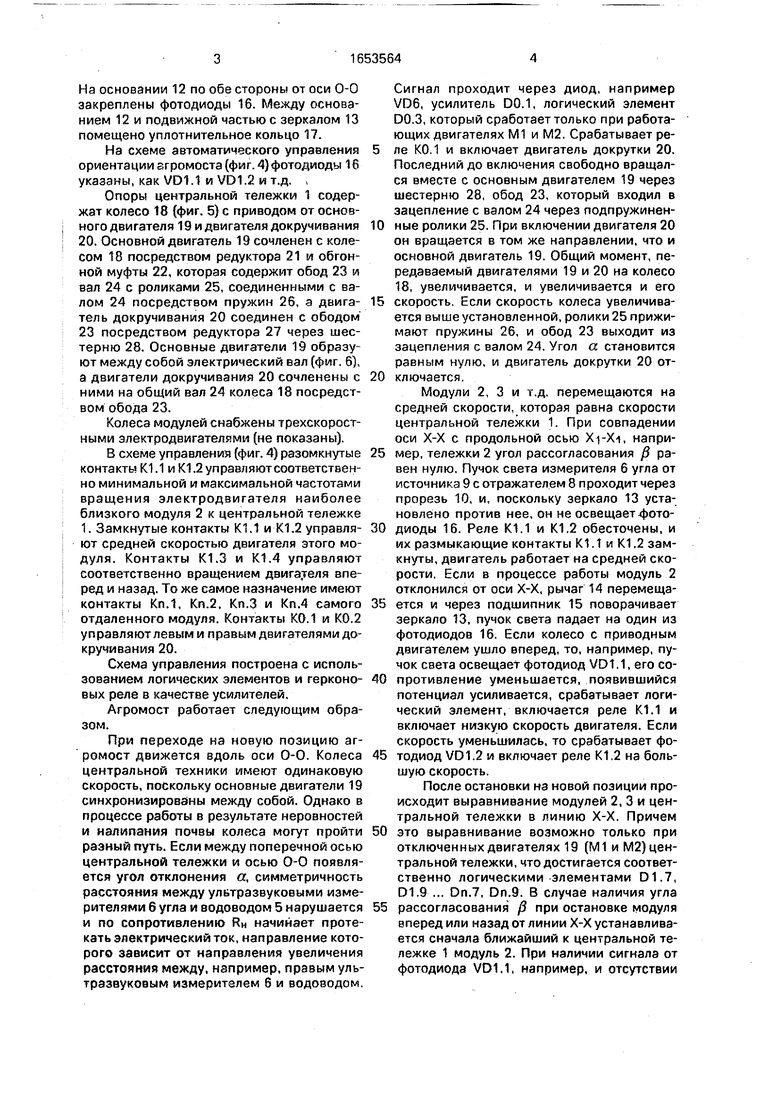
Измерители линейности 7 представляют собой закрытый узел (фиг. 3), содержащий отражатель 8 с источником света 9, затеняющий экран с прорезью 10, закрепленный между крышкой 11 и основанием 12. который крепится к центральной тележке 1 или к модулям 2, 3, 4. В корпусе измерителя линейности напротив прорези 10 помещено зеркало 13, жестко связанное с рычагом 14 посредством подшипника 15. Рычаг 14 предназначен для крепления к соседнему модулю 2, 3, 4 или к центральной тележке 1.
О 01
со ел
Ch
-U
На основании 12 по обе стороны от оси 0-0 закреплены фотодиоды 16. Между основанием 12 и подвижной частью с зеркалом 13 помещено уплотнительное кольцо 17.
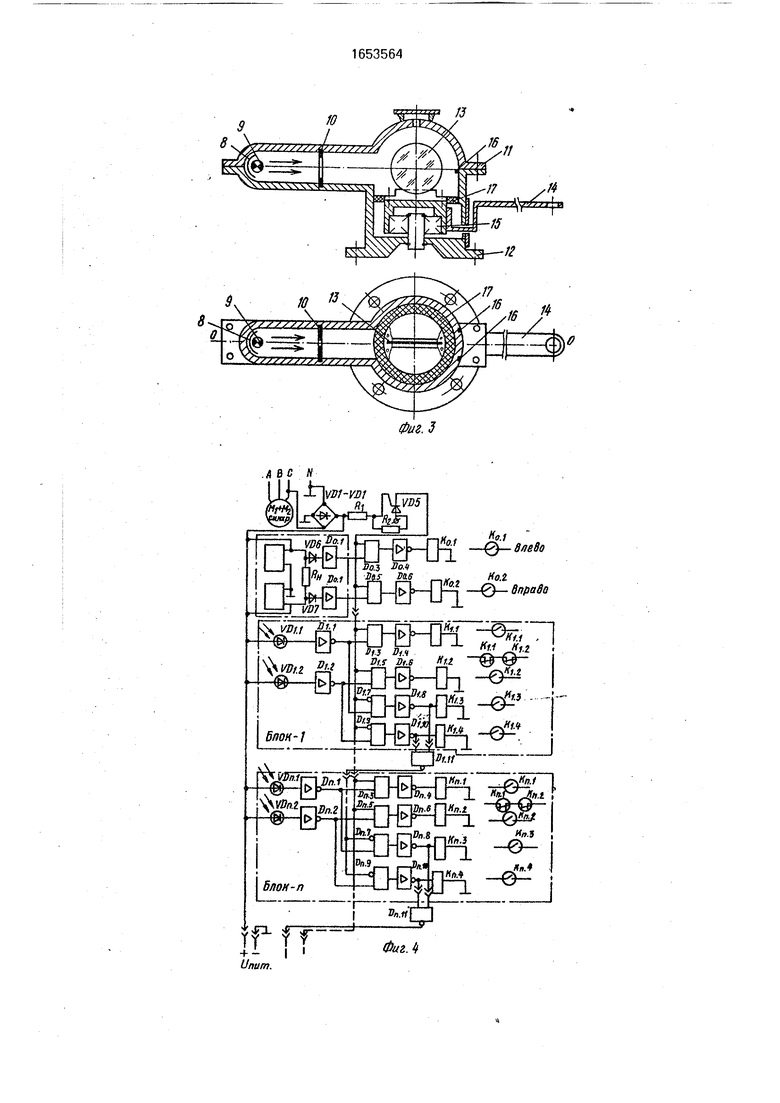
На схеме автоматического управления ориентации ггромоста (фиг. 4) фотодиоды 16 указаны, как VD1.1 и VD1.2 и т.д.
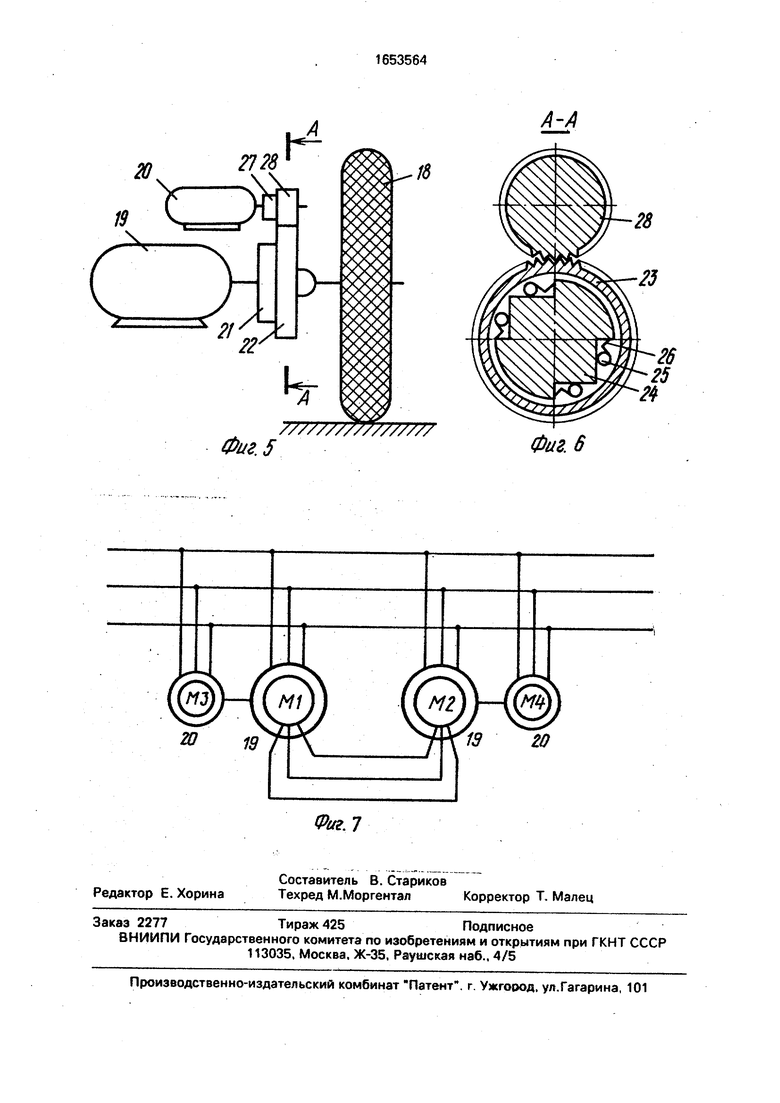
Опоры центральной тележки 1 содержат колесо 18 (фиг. 5) с приводом от основного двигателя 19 и двигателя докручивания 20. Основной двигатель 19 сочленен с колесом 18 посредством редуктора 21 и обгонной муфты 22, которая содержит обод 23 и вал 24 с роликами 25, соединенными с валом 24 посредством пружин 26, а двигатель докручивания 20 соединен с ободом 23 посредством редуктора 27 через шестерню 28. Основные двигатели 19 образуют между собой электрический вал (фиг. 6), а двигатели докручивания 20 сочленены с ними на общий вал 24 колеса 18 посредством обода 23.
Колеса модулей снабжены трехскорост- ными электродвигателями (не показаны).
В схеме управления (фиг. 4) разомкнутые контакты К1.1 и К1.2 управляют соответственно минимальной и максимальной частотами вращения электродвигателя наиболее близкого модуля 2 к центральной тележке 1. Замкнутые контакты К1.1 и К1.2 управляют средней скоростью двигателя этого модуля. Контакты К1.3 и К1.4 управляют соответственно вращением двигателя вперед и назад. То же самое назначение имеют контакты Кп.1, Кп.2, Кп.З и Кп.4 самого отдаленного модуля. Контакты КОЛ и КО.2 управляют левым и правым двигателями докручивания 20.
Схема управления построена с использованием логических элементов и герконо- вых реле в качестве усилителей.
Агромост работает следующим образом.
При переходе на новую позицию аг- ромост движется вдоль оси 0-0. Колеса центральной техники имеют одинаковую скорость, поскольку основные двигатели 19 синхронизированы между собой. Однако в процессе работы в результате неровностей и налипания почвы колеса могут пройти разный путь. Если между поперечной осью центральной тележки и осью О-О появляется угол отклонения а, симметричность расстояния между ультразвуковыми измерителями 6 угла и водоводом 5 нарушается и по сопротивлению RH начинает протекать электрический ток, направление которого зависит от направления увеличения расстояния между, например, правым ультразвуковым измерителем б и водоводом.
Сигнал проходит через диод, например VD6, усилитель D0.1, логический элемент D0.3, который сработает только при работающих двигателях М1 и М2. Срабатывает реле КОЛ и включает двигатель докрутки 20. Последний до включения свободно вращался вместе с основным двигателем 19 через шестерню 28, обод 23, который входил в зацепление с валом 24 через подпружиненные ролики 25. При включении двигателя 20 он вращается в том же направлении, что и основной двигатель 19. Общий момент, передаваемый двигателями 19 и 20 на колесо 18, увеличивается, и увеличивается и его
скорость. Если скорость колеса увеличивается выше установленной, ролики 25 прижимают пружины 26, и обод 23 выходит из зацепления с валом 24. Угол а. становится равным нулю, и двигатель докрутки 20 отключается.
Модули 2, 3 и т.д. перемещаются на средней скорости, которая равна скорости центральной тележки 1. При совпадении оси Х-Х с продольной осью Xi-X-i, например, тележки 2 угол рассогласования ft равен нулю. Пучок света измерителя 6 угла от источника 9 с отражателем 8 проходит через прорезь 10, и, поскольку зеркало 13 установлено против нее, он не освещает фотодиоды 16. Реле К1.1 и К1.2 обесточены, и их размыкающие контакты К1.1 и К1.2 замкнуты, двигатель работает на средней скорости. Если в процессе работы модуль 2 отклонился от оси Х-Х, рычаг 14 перемещается и через подшипник 15 поворачивает зеркало 13, пучок света падает на один из фотодиодов 16. Если колесо с приводным двигателем ушло вперед, то, например, пучок света освещает фотодиод VD1.1, его сопротивление уменьшается, появившийся потенциал усиливается, срабатывает логический элемент, включается реле К1.1 и включает низкую скорость двигателя. Если скорость уменьшилась, то срабатывает фотодиод VD1.2 и включает реле К1.2 на большую скорость.
После остановки на новой позиции происходит выравнивание модулей 2, 3 и центральной тележки в линию Х-Х. Причем
это выравнивание возможно только при отключенных двигателях 19 (М1 и М2) центральной тележки, что достигается соответственно логическими элементами D1.7, D1.9 ... Dn.7, Dn.9. В случае наличия угла
рассогласования / при остановке модуля вперед или назад от линии Х-Х устанавливается сначала ближайший к центральной тележке 1 модуль 2. При наличии сигнала от фотодиода VD1.1, например, и отсутствии
сигнала с двигателей М1 и М2 срабатывает реле К1.3 и включает двигатель на меньшей скорости назад После выравнивания модуля 2 элемент D1.11 дает разрешение на выравнивание модуля 3 Этот процесс осуществляется до установления крайнего модуля п. Такое же выравнивание производится и по другую сторону от центральной тележки 1.
Формула изобретения 1, Агромост, содержащий ферму, секции которой шарнирно соединены между собой, лотки-водоканалы, самоходные колесные тележки секций и электропривод, отличающийся тем, что, с целью автоматической корректировки курсового движения, он снабжен устройствами ориентации вдоль двух взаимно перпендикулярных осей, электродвигателями докручивания колес с приводом управления, обгонными муфтами с валами и ободами, при этом устройства ориентации вдоль оси, перпендикулярной направлению движения, связаны с электроприводом колесного хода, а устройства ориентации вдоль оси, параллельной направлению движения, связаны с электроприводом электродвигателей докручивания
колес, причем кинематическая связь электродвигателей докручивания колес с , электродвигателями колесного хода выполнена посредством обода и вала обгонной муфты.
0 2. Агромост по п. 1,отличающий- с я тем, что устройство ориентации выполнено в виде,- измерителя линейности, со- десжэщего рычаг и корпус с размещенными в нем источником света, зеркалом, затеняю5 щим экраном с прорезью, подшипником и фотодиодами, причем затеняющий экран с прсфезью размещен между источником света и зеркалом, фотодиоды расположены симметрично относительно горизонтальной
0 оси корпуса, а зеркало закреплено в корпусе с помощью подшипника, при этом рычаг жестко связан с зеркалом и соединен с одной из секций агромоста, а корпус - соединен с соседней секцией.
Фиг. 1
Фиг. 2
rr tc
ID ГО
ю
(Ј
i
- - ilPH
J
5-fS
20
Фиг. 5
/////////7/7//77/
w
А-А
Фиг. 6
| Мостовой агрегат для сельскохозяйственных работ | 1980 |
|
SU1028256A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
