Риг.2
Изобретение относится к машиностроению и может быть использовано в робото- технических комплексах.
Целью изобретения является повыше ние производительности и эксплуатационных возможностей вакуумного захвата.
На фиг. 1 показан вакуумный захват, общий вид: на фиг. 2 - то же, момент удержания детали; на фиг. 3 - захчат, содержащий в верхней части корпуса сильфон; на фиг. 4 - захват с нижним сильфоном. расположенным асимметрично относительно вертикальной оси корпуса.
Вакуумный захват содержит корпус 1, сильфон 2, объемную вставку 3, расположенную внутри сильфона, катушку 4 возбуждения и пружину 5 сжатия, установленную соосно внутри сильфона. Сильфон 2 в верхней части сообщается через сквозное отверстие 6 с атмосферой.
В качестве объемной ставки 3 использована ферромагнитная жидкость. Для улучшения передачи магнитного поля от катушки 4 возбуждения всему объему ферромагнитной жидкости сильфон 2 выполнен с включением пермаллоя.
Для сортировки изделий по весу замыкающие контакты 7 катушки 4 возбуждения размещены на сильфоне 2 с возможностью регулирования.
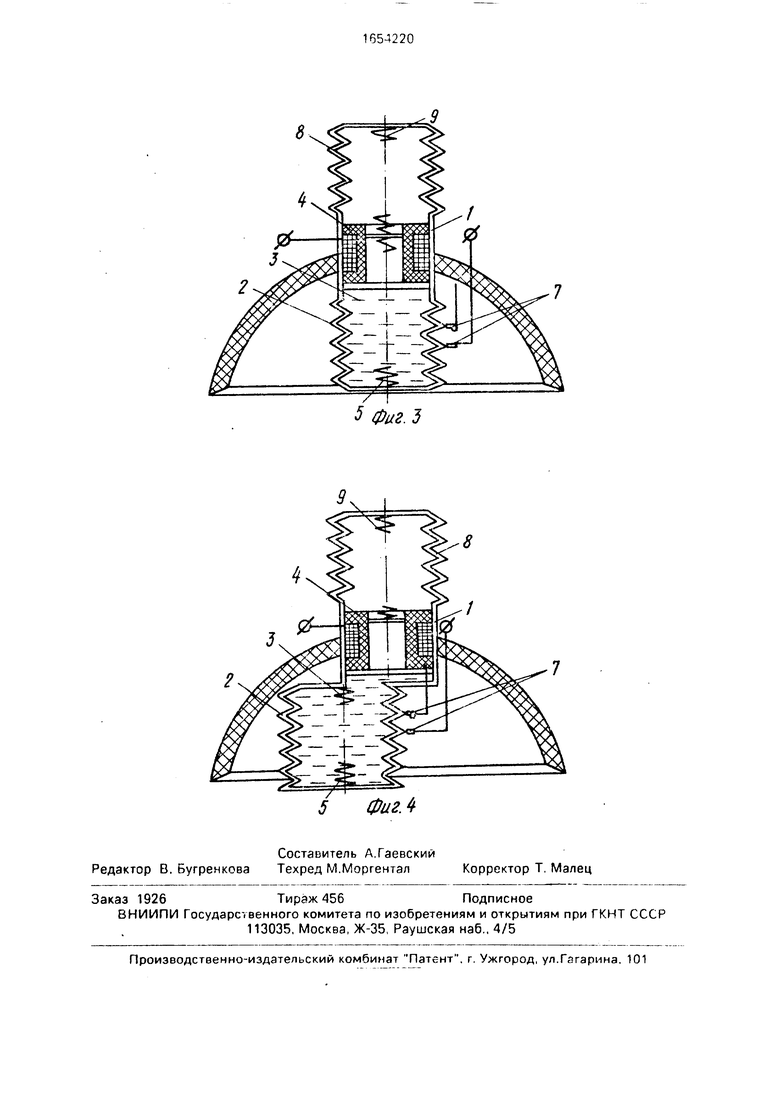
Для обеспечения возможности работы предлагаемого вакуумного захвата в горизонтальном положении и в перевернутом положении (относительно положения на фиг. 1 и 2) вместо сквозного отверстия 6 и свободного рабочего объема корпуса верхняя часть корпуса выполнена в виде сильфона 8, сообщающегося внутренней полостью с нижним сильфоном и снабженного пружиной 9 растяжения, установленной между дном верхнего сильфона и катушкой возбуждения (фиг. 3). Рабочий объем верхнего сильфона может быть или равен рабочему объему нижнего сильфона или быть больше его, но не меньше.
Нижний сильфон может быть расположен внутри корпуса захвата таким образом, что его ось симметрии не совпадает с продольной осью симметрии корпуса (фиг. 4), а его рабочая длина больше высоты корпуса для обеспечения быстрого и надежного де- вакуумирования вакуумного захвата.
В нерабочем состоянии вакуумного захвата (фиг. 1) сильфон 2 под действием пружины 5 сжатия имеет свой максимальный объем, при этом нижняя часть сильфона его дно находится на уровне нижней кромки корпуса 1, Для .вакуумного захвата, в котором сильфон расположен внутри корпуса асимметрично относительно его продольной оси (фиг. 4), рабочая длина этого сильфона больше, чем рабочая высота корпуса. Вакуумный захват работает следующим образом
Захват обычным образом прижимается
к детали. При этом происходит одновременная деформация корпуса 1, что вызывает вытеснение воздуха из вакуумной камеры и сильфона 2, что и приводит к сжатию 5 пру0 жины и перемещению ферромагнитной жидкости из нижней части сильфона в верхнюю, вызывающему вытеснение воздуха из сильфона в атмосферу через сквозное отверстие 6.
5В вакуумном захвате (фиг. 3 и 4} при
прижатии его к детали происходит деформация корпуса 1, что вызывпет вытеснение воздуха из вакуумной камеры, одновременное сжатие нижнего сипьфона 2 и растяже0 ние верхнею сильфона 8 что
сопровождается деформацией пружин 5 и 9.
Деформация сильфонь 2 в конечном
счете вызывает замыкание контактов 7. что
приводит к срабатыванию катушки 4 воз5 буждения. На катушке возбуждения появляется магнитное поле, передаваемое через стенки оильфона. выполненные с включением пермаллоя, на весь ооъом ферромагнитной жидкости, заключенной внутри
0 сильфона, что обеспечивает ее переход из жидкого состояния в твердое, фиксирует положение сильфона.
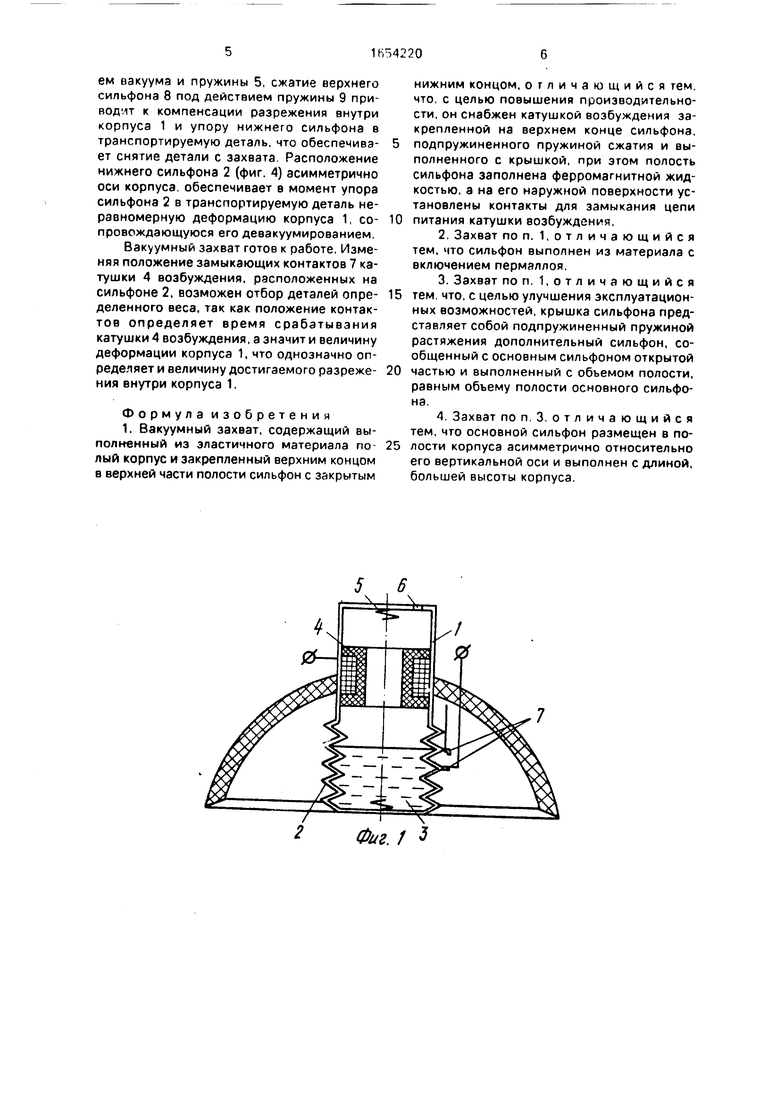
В дальнейшем захват поднимается вместе с деталью (фиг. 2), удерживаемой при
5 этом силой разрежения внутри корпуса 1, Сила разрежения действует на стенки и на дно сильфона, стараясь их деформировав, уменьшить степень разрежения. Поперечная деформация стенок сильфона невоз0 можна из-за их конструкции, а продольная деформация не происходит благодаря силам внутреннего сопротивления деформации ферромагнитного вещества, перешедпчго под действием магнитного
5 поля в твердое состояние. Деталь с помощью захвата транспортируется.
Для снятия изделий с захвата достаточно обесточить катушку возбуждения, что приведет к обратному переходу ферромаг0 нигной жидкости в жидкое состояние, уменьшению сил внутреннего сопротивления продольной деформации сильфона 2 под /зэйствием пружины 5 и вакуума, при этом произойдет частичная компенсация
5 разрежения внутри корпуса 1, вызывающая уменьшение сил. удерживающих деталь на захвате, ее снятие с захвата.
В вакуумном захвате (фиг. 4) при снятии напряжения с катушки 4 возбуждения расширение нижнего сильфона 2 под действием вакуума и пружины 5, сжатие верхнего сильфона 8 под действием пружины 9 приводит к компенсации разрежения внутри корпуса 1 и упору нижнего сильфона в транспортируемую деталь, что обеспечивэ- ет снятие детали с захвата Расположение нижнего сильфона 2 (фиг. 4) асимметрично оси корпуса, обеспечивает в момент упора сильфона 2 в транспортируемую деталь неравномерную деформацию корпуса 1, со- провождающуюся его девакуумированием. Вакуумный захват готов к работе. Изменяя положение замыкающих контактов 7 катушки 4 возбуждения, расположенных на сильфоне 2, возможен отбор деталей опре- деленного веса, так как положение контактов определяет время срабатывания катушки 4 возбуждения, а значит и величину деформации корпуса 1, что однозначно определяет и величину достигаемого разреже- ния внутри корпуса 1.
Формула изобретения 1. Вакуумный захват, содержащий выполненный из эластичного материала по- лый корпус и закрепленный верхним концом в верхней части полости сильфон с закрытым
нижним концом, отличающийся тем. что. с целью повышения производительности, он снабжен катушкой возбуждения закрепленной на верхнем конце сильфонз. подпружиненного пружиной сжатия и выполненного с крышкой, при этом полость сильфона заполнена ферромагнитной жидкостью, а на его наружной поверхности установлены контакты для замыкания цепи питания катушки возбуждения.
2.Захват по п. 1,отличающийся тем. что сильфон выполнен из материала с включением пермаллоя.
3.Захват по п. 1,отличающийся тем что, с целью улучшения эксплуатационных возможностей, крышка сильфона представляет собой подпружиненный пружиной растяжения дополнительный сильфон, сообщенный с основным сильфоном открытой частью и выполненный с объемом полости, равным объему полости основного сильфона.
4.Захват поп 3. отличающийся тем, что основной сильфон размещен в полости корпуса асимметрично относительно его вертикальной оси и выполнен с длиной, большей высоты корпуса.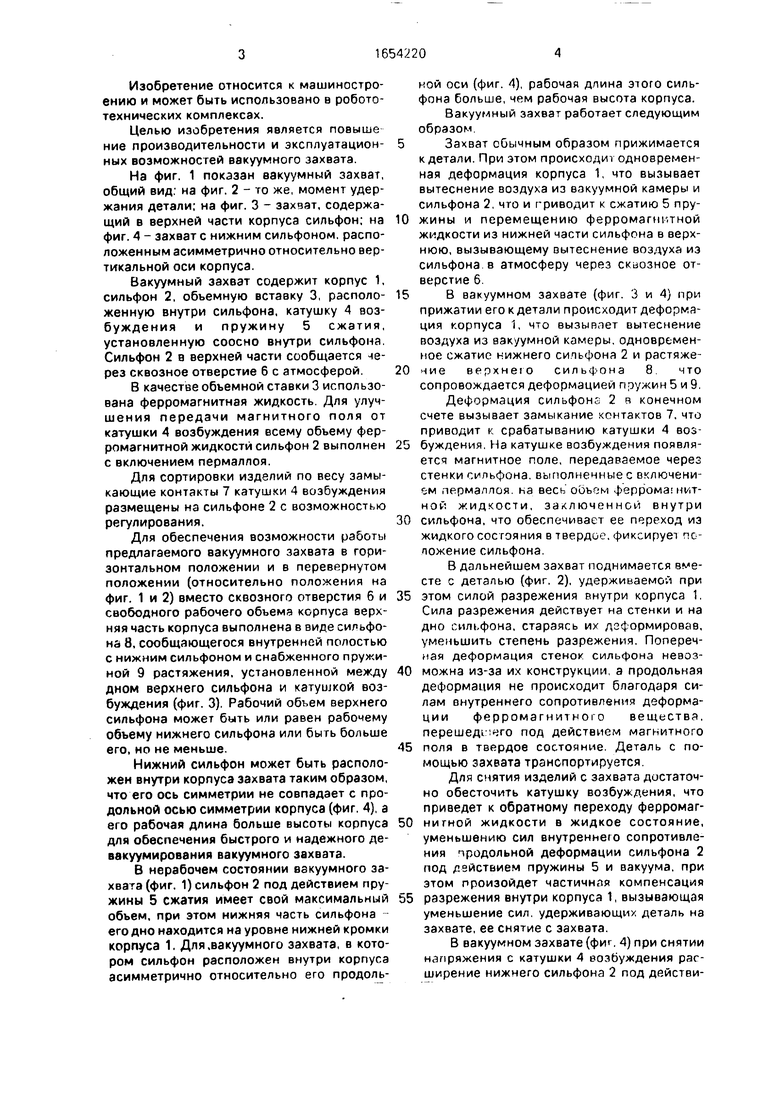
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1261793A1 |
| Вакуумный захват (его варианты) | 1984 |
|
SU1201214A1 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| Губка захвата для хрупких деталей | 1982 |
|
SU1060467A1 |
| Устройство для гранулирования расплавов | 1989 |
|
SU1722560A1 |
| СПОСОБ ФИКСАЦИИ НЕЖЕСТКОЙ ЗАГОТОВКИ СЛОЖНОГО ПРОФИЛЯ И ПРИСПОСОБЛЕНИЕ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2018 |
|
RU2701815C1 |
| Электромагнитное запорное устройство | 1986 |
|
SU1397666A1 |
| Захват для полых изделий | 1986 |
|
SU1381059A1 |
| ВИБРОНАСОС | 1993 |
|
RU2066794C1 |
Изобретение относится к машиностроению и может быть использовано в робото- технических комплексах. Цель изобретения - повышение производительности и эксплуатационных возможностей захвата Вакуумный захват содержит корпус 1, сильфон 2, объемную вставку 3, расположенную внутри сильфона, катушку 4 возбуждений, пружину 5 сжатия, установленные внутри сильфона, сообщающемся через сквозное отверстие 6 в верхней части корпуса с атмосферой. Регулируемые контакты 7 катушки 4 возбуждения расположены на сильфоне В качестве объемной вставки использована ферромагнитная жидкость. При прижатии захвата к детали происходит деформация корпуса 1 и сильфона 2, что вызывает вытеснение ферромагнитной жидкости из нижней части сильфона в верхнюю, сжатие пружины 5. Если вакуумный захват снабжен сильфоном 8, расположенным в верхней части корпуса 1, то сильфон 8 при сжатии сильфона 2 наполняется ферромагнитной жидкостью. При замыкании контактов 7 срабатывает катушка 4 возбуждения, и ферромагнитная жидкость переходит в твердое состояние. Изделие, удерживаемое на захвате за счет разрежения внутри корпуса, транспортируется к месту сброса. 3 з.п.ф-лы, 4 ил. (Л С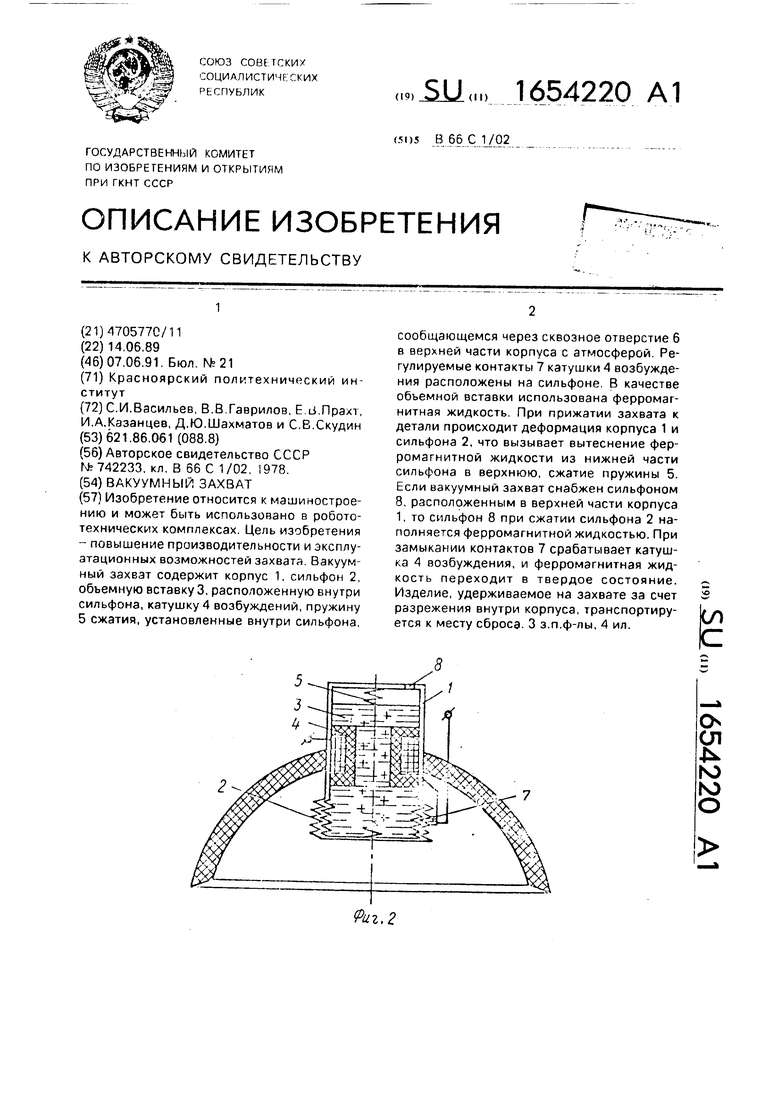
7
Фиг. 1 3
в
4
5 фиг. J
8
фигЛ
| Система рулевого управления | 1977 |
|
SU742233A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
