,2. Губка по пЛ, о т л и ч а rout а я с я тем, что привод дополнительного сильфона выполнен в виде электромагнита,якорь которого связан с этим сильфоном, а обмотка расположена на корпусе и соединена последовательно с нагревательным элементом.
3. Губка по П.1, о т л и ч ающ а я с я тем, что привод дополнительного сильфона выполнен в виде пружины из материала, обладающего свойством памяти формы, и соединенной последовательно с нагревательным элементом.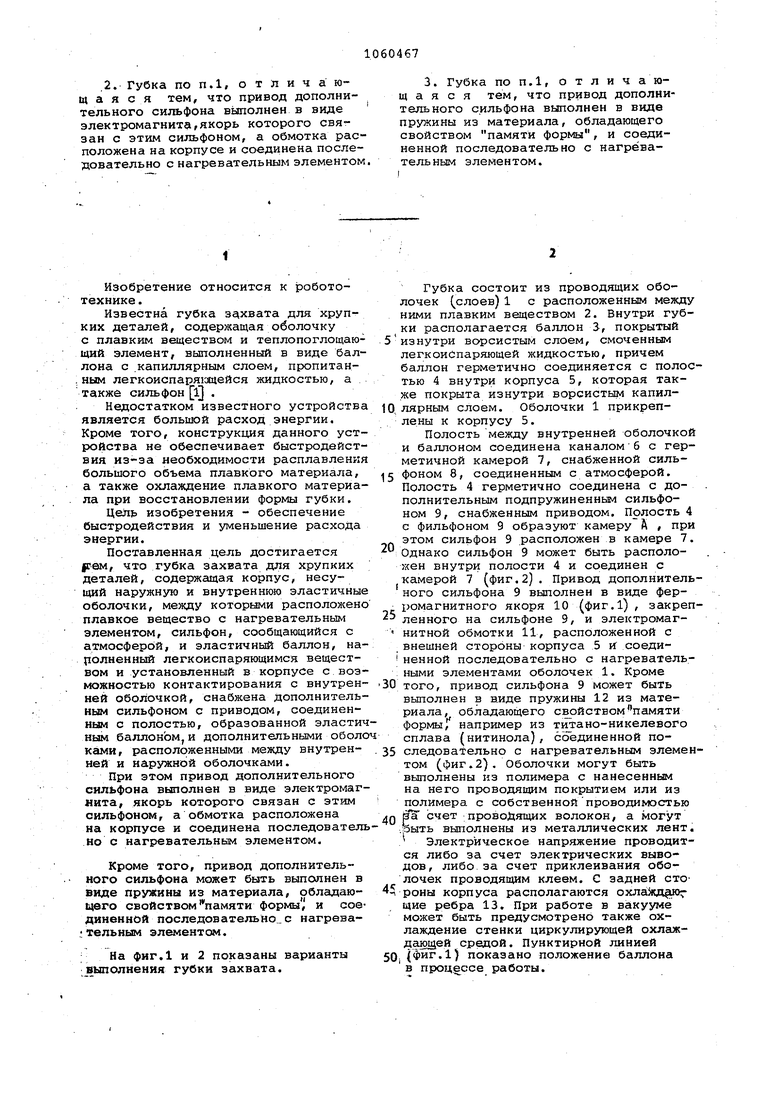

| название | год | авторы | номер документа |
|---|---|---|---|
| Губка для захвата хрупких деталей | 1990 |
|
SU1812101A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
| Губка захвата для хрупких деталей | 1981 |
|
SU975388A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Губка схвата | 1990 |
|
SU1815212A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| НАДУВНОЙ СПАСАТЕЛЬНЫЙ ПЛОТ | 2015 |
|
RU2583030C1 |
| СЛИТОК ИЗ РАДИОАКТИВНЫХ МЕТАЛЛИЧЕСКИХ ОТХОДОВ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 1998 |
|
RU2145126C1 |
1. ГУБКА ЗАХВАТА ДЛЯ ХРУПКИХ ДЕТАЛЕЙ, содержащая корпус, несущий наружную и внутреннюю эластич ые оболочки, между которыми расположено плавкое вещество с нагреват Льным элементом, сильфон, сообщающийся с атмосферой, и эластичный баллон, наполненный легко испаряющимся веществом и установленный в корпусе с возможностью контактиров&ния с внутренней оболочкой, отличающаяся Ч-ем, что, с целью обеспечения быстрюдействия и уменьшения расхода энергии, она снабжена дополнительным сильфоном с приводом, соединенным с полостью, образованной эластичным баллоном, и дополнитель- ными оболочками, расположенными между внутренней и наружной оболочками. 4 а: |
Изобретение относится к робототехнике . Известна губка захвата для хрупких деталей, содержащая оболочку с плавким веществом и теплопоглощающий элемент, выполненный в виде баллона с капиллярным слоем, пропитан,ным легкоиспаряющейся жидкостью, а также си ль фон ij . Недостатком известного устройства является большой расход энергии. Кроме того, конструкция данного устройства не обеспечивает быстродействия из-за необходимости расплавления большого объема плавкого материала, а также охлаждение плавкого материала при восстановлении формы губки, Цель изобретения - обеспечение быстродействия и уменьшение расхода энергии. Поставленная цель достигается |гем, что губка захвата для хрупких деталей, содержащая корпус, несущий наружную и внутреннюю эластичные оболочки, между которыми расположено плавкое вещество с нагревательным элементом, сильфон, сообщающийся с атмосферой, и эластичный баллон, наролненный легкоиспаряющимся веществом и установленный в корпусе с возможностью контактирования с внутренней оболочкой, снабжена Дополнительным сильфоном с приводом, соединенным с полостью, образованной эластич ным баллоном,и дополнительными оболо ками, расположенными между внутренней и наружной оболочками. При этом привод дополнительного сильфона выполнен в виде электромагнита, якорь которого связан с этим сильфоном, а обмотка расположена на корпусе и соединена последователь но с нагревательным элементом. Кроме того, привод дополнительного сильфона может быть выполнен в виде пружины из материала, обладаюЬ)его свойством памяти формы и соединенной последовательно,, с нагрена;тельным элементом. На фиг.1 и 2 показаны варианты выполнения губки захвата. Губка состоит из проводящих оболочек (слоев) 1 с расположенным между ними плавким веществом 2. Внутри губки располагается баллон 3, покрытый изнутри ворсистым слоем, смоченным легкоиспаряющей жидкостью, причем баллон герметично соединяется с полостью 4 внутри корпуса 5, которая также покрыта изнутри ворсистым капиллярным слоем. Оболочки 1 прикреплены к корпусу 5. Полость между внутренней оболочкой и баллоном соединена каналомб с герметичной камерой 7, снабженной сильфоном 8, соединенным с атмосферой. Полость 4 герметично соединена с дополнительным подпружиненным сильфоном 9, снабженным приводом. Полость 4 с фильфоном 9 образуют камеру А , при этом сильфон 9 расположен в камере 7. Однако сильфон 9 может быть расположен внутри полости 4 и соединен с камерой 7 (фиг.2). Привод дополнительного сильфона 9 выполнен в виде ферромагнитного якоря 10 (фиг.1) , закрепленного на сильфоне 9, и электромагнитной обмотки 11, расположенной с внешней стороны корпуса 5 к соединенной последовательно с нагревательными элементами оболочек 1. Кроме того, привод сильфона 9 может быть выполнен в виде пружины 12 из материала, обладающего свойством памяти формы , например из титано-никелевого сплава (нитинола), соединенной последовательно с нагревательным элементом (фиг.2). Оболочки могут быть выполнены нз полимера с нанесенным на него проводящим покрытием или из полимера с собственной проводимостью ваГ счет проводящих волокон, а могут ;5ыть выполнены из металлических лент, Электрическое напряжение проводится либо за счет электрических выводов, либо за счет приклеивания оболочек проводящим клеем. С задней стороны корпуса располагаются охлгйад ю щие ребра 13. При работе в вакууме может быть предусмотрено также охлаждение стенки циркулирующей охлаждающей средой. Пунктирной линией (фиг.1) показано положение баллона в процессе работы. ; Устройство раб.атает следующим об разом. Для мягкого захвата необходимо расплавить плавкое вйцество между оболочками (слоями) 1. Для этого на оболочки 1 подается электрический ток. Ток проходит также через о мотку 11, вызывая втягивание ферромагнитного якоря 10, что приводит к распрямлению сильфона и соответственному сжатию баллона 3 до полож НИН, показанного пунктирной линией (фиг.11. Плавкое вещество плавится, губки уменьшают жесткость и при контакте с поверхностью детали принимают форму детали. При этом газ вытесняется через канал 6 в камеру 7, сжимает сильфон 8, соединен ный с атмосферой, что приводит к увеличению мягкости охвата детали. Далее происходит отключение тока. Сильфон 9 при этом возвращается в исходное положение. Баллон 3 частич но расправляется и плотно облегчает внутреннюю поверхность оболочек 1 газ из промежутка между баллоном 3 и оболочками 1 вытесняется в каме ру 7) , вызывая их охлаждение, так как жидкость внутри баллона испаряется и конденсируется на охлаждае мой стенке баллона 3. Плавкое вещество при этсяи твердеет, увеличивая жесткость губки, становится возможным подъем детали и перенос ее на другое место. В виде тонкости слоев плавкого вещества твердение его происходит быстрее. Для опускания детали необходимо развести элементы корпуса захвата и расплавить вещество между оболочками 1 губки. При включении тока ферромагнитный якорь 10 вновь втягивается внутрь обмотки 11 и баллон отходит от оболочек 1. При этом пла кое вещество под действием тока плавится,и оболочки под действием вытесняемого распрямляющимся сильфоном 9 из камеры 7 восстанавливают первоначальную форму.При отключении тока за зор между баллоном 3 и оболочкой 1 сохраняется и охлаждение губки происходит не так интенсивно. Поэтому при последующем захвате нет необходимос.ти плавить все вещество. При выполнении привода в виде пружины 12, перед захватом детали (фиг.2| подают напряжение на пружи|Ну и на оболочки 1. Под действием тепловыделения пружина 12 поднимает сильфон 9, что вызывает сокращение объема баллона 3 и заполнение газом пространства между стенк-ами баллона и оболочками. Под действием выделяющегося на оболочках тепла тонкие слои плавкого вещества плавятся и губка уменьшает свою жесткость. При захвате детали такая губка охватывает деталь, принимая форму детгши, а излишек газа уходит в сильфон 8. При охватывании детали ток отключают, пружина 12 возвращает сильфон 9 в исходное положение, причем баллон распрямляется и входит в контгшт с деформированными оболочками 1, выэывая ИХ интенсивное охлаждение. Деталь фиксируется в захвате. Для освобождения детали необходимо развести элементы корпуса, а в некоторых случаях и расплавить плавкое вещество. При расплавлении плавкого вещества пружина 12 снова втягивает сильфон 9 и баллон не контактирует i с поверхностью губки, т.е. теплоотвод не происходит. После расплавления вещества 2 устройство вновь готово к работе. При необходимости захвата деталей одной серии нет необходимости каждый раз расплавлять плавкое вещество. После первого захвата детали данной серии, при котором происходит деформация оболочек и расплавление плавкого вещества, возможно захватывать затвердевшими губками другие деташи данной серии, что позволяет увеличить быстродействие и избежать потерь энеррии.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3253368,кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
