Изобретение относится к машиностроению и может быть использовано в манипуля торах и робототехнических устройствах для позиционирования обрабатываемых изделий. Целью изобретения является обеспечение надежности захвата и точности позиционирования захватываемой детали в схвате за счет обеспечения возможности самоустановки и фиксации толкателя. На фиг. 1 изображен схват, общий вид; на фиг. 2 - сечение А-А на фиг. 1. Схват манипулятора содержит установленные в корпусе I двуплечие зажимные рычаги 2 и привод их перемещения, включающий толкатель 3 с конической рабочей поверхностью, и двигатель линейного перемещения, выполненный в виде сильфона 4, сое. диненного с источником давления рабочей среды (не показан). На подвижном элементе 5 двигателя выполнена камера б, заполненная ферромагнитной жидкостью. В корпусе 1 расположена электромагнитная обмотка 7 для изменения вязкости, а в камере 6 установлены кольцевой магнит 8 для исключения вытеснения ферромагнитной жидкости и толкатель 3. Рычаги 2 подпружинены к корпусу 1 пружинами 9. Схват работает следующим образом. Рабочая среда, поступая в полость сильфона 4, удлиняет его, перемещая при этом закрепленный на сильфоне 4 элемент 5 с камерой 6, заполненной ферромагнитной жидкостью, в которой плавает толкатель 3. Толкатель 3 конической рабочей поверхностью воздействует на зажимные рычаги 2, которые, поворачиваясь упираются в позиционируемую деталь (не показана). При этом толкатель 3 перемещается в сторону того рычага 2, который еще не коснулся позиционируемой детали, и лищь после этого наступает контакт всех рычагов 2 с деталью. В дальнейшем толкатель 3, перемещаясь в осевом направлении, осуществляет сжатие с помощью рычагов 2 детали. После зажима детали в обмотку 7 подается ток, и ферромагнитная жидкость «затвердеет, фиксируя толкатель 3, исключая при этом возможность отклонения зажимных рычагов 2 от положения позиционирования. Для освобождения позиционируемой детали отключается ток в обмотке 7 и снижается давление рабочей среды в полости сильфона 4. Последний сжимается, отводя при этом толкатель 3, и пружинами 9 рычаги 2 отводятся от детали.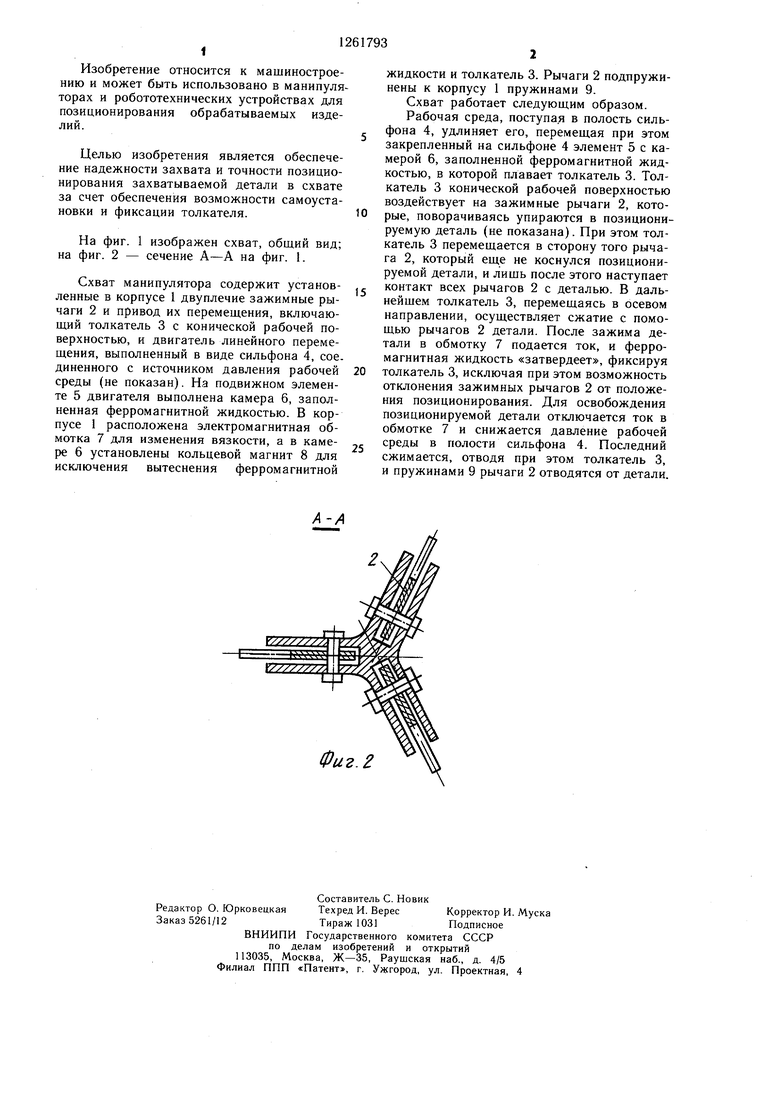
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Устройство для кассетирования плоских деталей | 1988 |
|
SU1618578A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для перемещения объектов в рабочую зону | 1983 |
|
SU1122503A1 |
| Схват манипулятора | 1985 |
|
SU1324844A1 |
| Схват манипулятора | 1987 |
|
SU1509246A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
СХВАТ МАНИПУЛЯТОРА, содержащий установленные в корпусе двуплечие зажимные рычаги и привод их перемещения, включающий толкатель с конической рабочей поверхностью, и двигатель линейного перемещения, подвижный элемент которого связан с толкателем, отличающийся тем, что, с целью повыщения надежности захвата и точности позиционирования захватываемой детали в схвате за счет обеспечения возможности самоустановки и фиксации толкателя, он снабжен расположенной в корпусе электромагнитной обмоткой и кольцевым магнитом, а на подвижном элементе двигателя выполнена камера, заполненная ферромагнитной жидкостью, в которой расположен толкатель и охватывающий его кольцевой магнит, при этом обмотка расположена концентрично оси схвата. ta б сл JA tc О5 7 со со Фиг.1
| Захват манипулятора | 1976 |
|
SU582175A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
