ИчоПретенир (ттносится к захватным устройствам для по.пых изделий.
Цель изобретения - расширение эксплуатационных розможностей захвата.
На фиг. 1 представлен захват, в нераСючем СОСТОЯРШИ; на фиг. 2 - тоже, в рабочем состоянии, в момент распора изделия (электромагнитная катушка установлена в нижнем конце магнитопроницаемой части центральной штанг и) , на фиг. 3 - то же, в момент распора изделия (электромагнитная катушка установлена в середине магнитопроницаемой части центральной штанги).
Захват содержит центральную штангу 1, нижний конец которой снабжен упором 2, эластичный захватный орган 3, иакреплеиньа в нижней части цент- ральной штанги и охватьшающий ее.
Центральная штанга 1 выполнена сотав по своей длине из магнитопро- цаемой 4 и магнитонепроницаемой 5 частей. В качестве механизма управле ния иcпoJтьзoвaн электромагнитный преобразователь, катуин а 6 которого жестко закреплена на нижнем конце магнитопроницаемой части 4 центральной штанги 1. Подвижная втулка 7 электромагнитного преобразователя выполнена из ферромагнитного материала и соединена с противоположно (BepxHCii) частЕ ю эластичного захватного органа 3, при этом наружная по- верхность эластичного захватного органа, разделенного в средней части на полослл равного сечения, имеет бсл}зшой коэффициент трения. Средняя часть эластичного захватного органа 3 имеет внутренний диаметр большш, чем диаметр центральной штанги, что позволяет избежать влияния силы трения в начальный момент смещения подвижной втулки 7 при одновременном его и П ибе.
:3 л : t; т ром а г н ит ные преобразователи подиержекь сильному влияншэ внешних
полей. Поэтому для увеличения силы,
развипас;мои преооразователем, следует прс дусмотреть экранирование. Роль экрана м(1жет выполнять перегружаемая деталь, ecjm она изготовлена из стали или друг ого ма нитопроводящего мате.риа 1-1, В других случаях эдастич- ный ак|;,1 I пьп-1 орган 3 целесообразно пыполнягь ;г1 пермаллоя (сплай железа с ни; (Ч , - . наружная поверхность ко,
Q 5
0
50 f. Q
5
0
торого облицг5вана элементами, имеющими большой коэффициент трения.
Для предотвращения невозврата под- вижног о элемента в исходное положение за счс Т потери упругих свойств продольными пластинами пермаддоя в зоне необратимых деформаци предусмотрено использование пружины 8 сжатия, установленной между верхним концом катушки 6 электромагнитного преобразователя и его подвижной втулки 7. Пружина 8 сжатия осуществляет возврат подвижной втулки 7 в исходное верхнее положение после снятия действия электромагнитных сил.
I На фиг. 3 представлено исполнение захвата для перегрузки полых изделий, содержащего две подвиж))ые втулки 7, катушку 6, установленную в сред ней части эластичного захватного органа 3 и жр.стко закрепленную в середине магнитопроницаемой части центральной штанги 1, состоящей из двух магнито- непроницаемых частей 5 и 9 и средней магиитопроницаемой части 4. Это позволяет транспортировать перегружаемое изделие не только строго вертикально, но и с необходимым углом наклона, что способствует расширению эксплуатационных возможностей предлагаемого захвата.
Увеличение универсальности предлагаемого захвата для перегрузки полых издсл1 й обусловлено расширением номенклатуры перегружаемых изделий. Использование эластичного захватного органа 3, разделенного на продольные полосы равного сечения, позволяет перегружать изделия не только с ци- линдр {ческим отверстием, но и с овальным и прямоугольным.
Захват работает следующим образом.
Захват обычным образом вводится во внутреннюю полость изделия. При подаче тока на катушку 6 электромагнитного преобразователя между катутпкой и подвижной ферромагнитной втулкой 7 формируется магнитное поле, магнитные силовые линии которого замыкаются по воздуху, и через магнитопроницаемую часть 4 центральной штанги 1. Подвижная ферромагнитная втулка 7 стремится расположиться так, чтобы усилить юле катущки 6, т.е. усилить ее индуктивность, что достигается при смещении подвижшлЧ ферромагнитной втулки 7 вдоль опроницае- мой части 4 центря. ьи(1.1 штанги 1
что вызывает продольный изгиб эластичного захватного органа 3, соединенного с ней верхним концом, и разделенного в средней своей части на продольные полосы равного сечения, позволяя получить их равную деформацию. При смещении подвижной ферромагнитной втулки 7 вдоль центральной штанги 1 радиус кривизны эластичного захватного органа 3 изменяется до момента касания наружной поверхности продольных полос, имеющих большой коэффициент трения, с внутренней поверхностью перегружаемого полого из- делия. Обратный изгиб (в сторону центральной штанги) не возможен, вследствие того, что линия перемещения подвижной ферромагнитной втулки 7 проходит с внутренней стороны про- дольных полос средней части эластичного захватного органа 3. После касания наружной поверхности продольны полос внутренней поверхности перегружаемой детали наступает период дефор мации эластичного захватного органа 3 в зоне контакта с перегружаемой деталью, что способствует увеличению площади поверхности контакта (трения
После этого центральная штанга перемещается вверх, при этом за счет сил трения в зоне касания продольные полосы эластичного захватного органа 3 удерживаются от смещения вдоль поверхности захватываемого изделия. Изделие поднимается.
Освобождение изделия от захвата осуществляется в обратном порядке.
Формула изобретения
1, Захват для полых изделий, содержащий охватывакмций центральную штангу эластичный захватный орган, прикрепленный к его нижнему концу упор и механизм управления захватным органом, отличающийся тем, что, с целью расширения эксплуатационных возможностей, эластичный захватный орган в своей центральной
5 0 5
0
5
0
,
части выполнен с продольны -ш iKini. ми равного сечения с нарулипй ностью из материала с большим коэффициентом трения, а захват снабжен прикрепленной к верхнему концу -.ишстич- ного захватного органа подв1ганой втулкой, охватывающей штангу и выполненной из ферромагнитного материала, при этом механизм управления захватным органом представляет собой электромагнитную катушку, а штанга выполнена составной из магнитопроницаемой и магнитонепроницаемой частей, к первой из которых жестко прикрепле.на электромагнитная катушка.
2,Захват поп, 1,отличаю- щ и и с я тем, что электромагнитная катушка прикреплена к нижнему концу магнитопроницаемой части.
3,Захват по п. 1, о т л и ч а ю- щ и и с я тем, что эластичный захватный орган выполнен с ферромагнитными включениями типа пермаллоя.
4,Захват по п. 1, о т л и ч аю щ и и с я тем, что эластичный элемент выполнен с внутренним диаметром средней части, большим внутреннего диаметра подвижной ферромагнитной втулки,
5,Захват по п. 1, о т л и ч аю щ и и с я тем, что межлу электромагнитной катушкой и подвижной втулкой установлен упругий элемент.
6,Захват по п. 1, отличающийся тем, что электромагнитная катушка установлена в середине магнитопроницаемой части штанги, а захват снабжен дополнительной ВТУЛКОЙ, соединенной с нижним конп,ом пластичного захватного органа, выполненного с продольными полосами рьпие и ниже катушки электромагнитного преобразователя ,
7,Захват по пп. 1 и 6, о т л и- чающийся тем, что продольные полосы выполнены с непоспч янной по высоте площадью сечения, меньшающей- ся сверху вниз.
Г
-f
0ue.i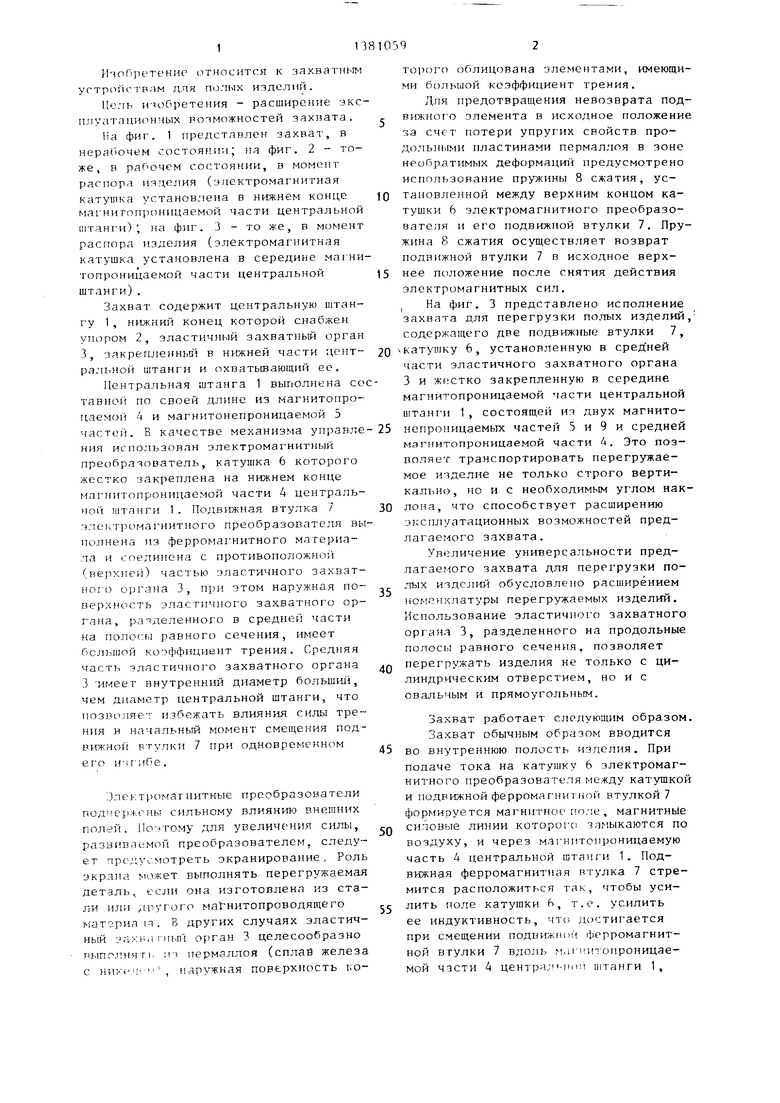
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ КЛАСТЕРА УПРАВЛЯЮЩИХ ЭЛЕМЕНТОВ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК РЕАКТОРА | 2017 |
|
RU2660946C1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| Захват для изделий с отверстиями | 1989 |
|
SU1676997A1 |
| Роботизированное устройство для внесения гербицидов в приствольные полосы сада | 2020 |
|
RU2739156C1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| ГРЕЙФЕР МНОГОЧЕЛЮСТНОЙ ЭЛЕКТРОМАГНИТНЫЙ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2226496C2 |
| СПОСОБ ОБРАБОТКИ КОЖ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2102488C1 |
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| ШВАРТОВНЫЙ ЗАХВАТНЫЙ МОДУЛЬ (варианты) | 2023 |
|
RU2808875C1 |

Изобретение относится к захватным устройствам для полых изделий. Цель изобретения - расширение эксплуатационных возможностей захвата. Захват содержит центральную штангу 1, упор 2, эластичный захватный орган 3, укрепленный в нижней части центральной штанги, состоящей из магнитопроницаемой части 4 и магнито- непроницаемой части 5, электромагнитный преобразователь с катушкой 6, жестко закрепленной на нижнем конце магнитопроницаемой части центральной штанги, и подвижной втулкой 7, выполненной из ферромагнитного материала и соединенной с верхней частью эластичного захватного органа 3. Наружная поверхность эластичного захватного органа 3 разделена в средней части на полосы равного сечения с большим коэффициентом трения. Пружина 8 сжатия служит для возврата подвижной втулки 7 в исходное верхнее положение после снятия действия электромагнитных сил. Захват вводят во внутреннюю полость изделия. При подаче тока на катушку 6 между катушкой и подвижной втулкой 7 формируется магнитное поле, в результате чего подвижная ферромагнитная втулка 7 перемещается вдоль магнитопроницаемой частих4 центральной штанги 1 и вызывает продольный изгиб эластичного захватного органа 3 до касания его полос с внутренней поверхностью изделия. Захват изделия осуществлен. Освобождение изделия от захвата осуществляется в обратном порядке. 6 3.п. ф-лы, 3 ил. (/; с с/э 00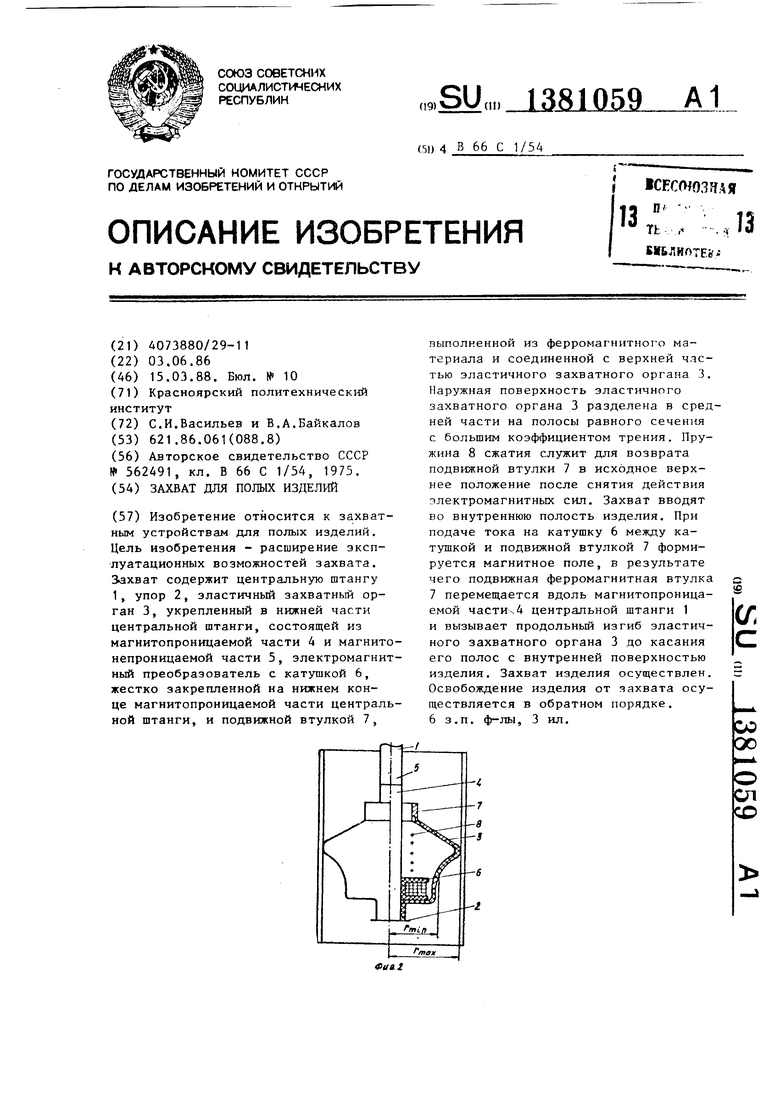
физ.З
| Групповое захватное устройство для изделий с отверстиями | 1975 |
|
SU562491A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
