Изобретение относится к горной промышленности и может быть использовано в системах управления гидрофицированными крепями очистных забоев угольных и горнорудных шахт.
Целью изобретения является снижение усилия ручного переключения модульного распределителя.
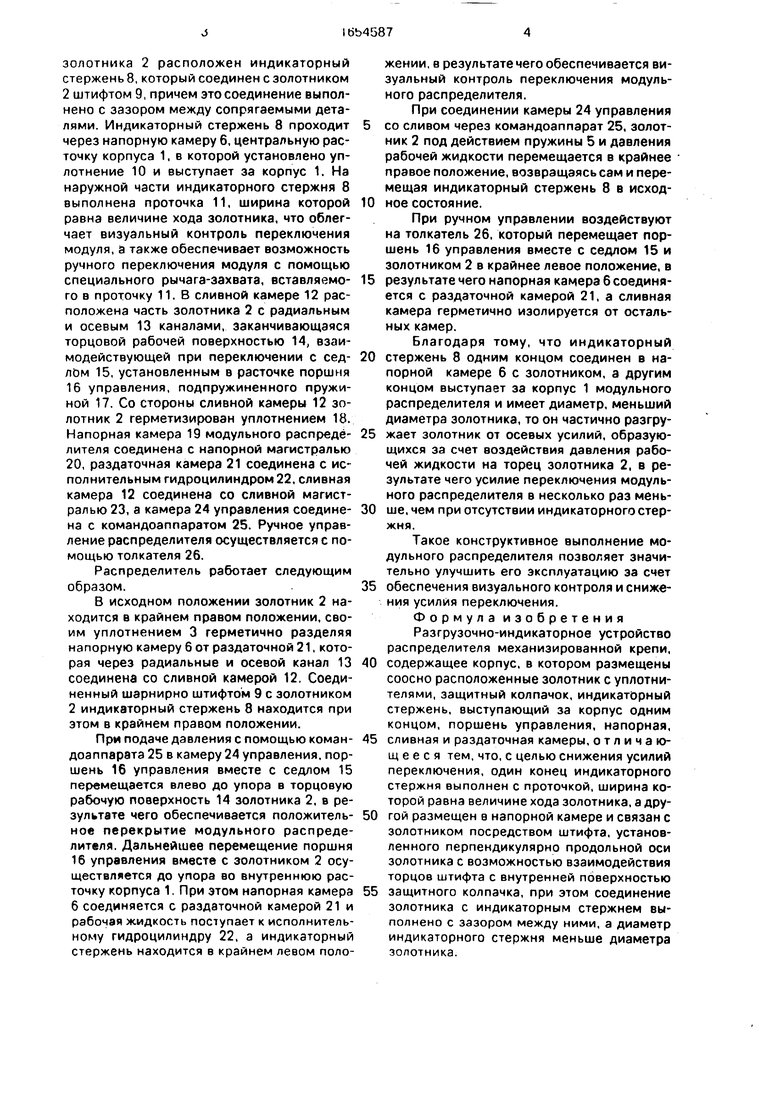
На чертеже изображен модульный распределитель механизированной крепи.
Модульный распределитель механизированной крепи состоит из корпуса 1, в цилиндрических расточках которого установлены золотник 2 с уплотнением 3, защитным колпачком 4 с пружиной 5, расположенных в напорной камере 6. В торцовой расточке 7
золотника 2 расположен индикаторный стержень 8, который соединен с золотником 2 штифтом 9, причем это соединение выполнено с зазором между сопрягаемыми деталями. Индикаторный стержень 8 проходит через напорную камеру 6, центральную расточку корпуса 1, в которой установлено уплотнение 10 и выступает за корпус 1. На наружной части индикаторного стержня 8 выполнена проточка 11, ширина которой равна величине хода золотника, что облегчает визуальный контроль переключения модуля, а также обеспечивает возможность ручного переключения модуля с помощью специального рычага-захвата, вставляемого в проточку 11. В сливной камере 12 расположена часть золотника 2 с радиальным и осевым 13 каналами, заканчивающаяся торцовой рабочей поверхностью 14, взаимодействующей при переключении с седлом 15, установленным в расточке поршня 16 управления, подпружиненного пружиной 17. Со стороны сливной камеры 12 золотник 2 герметизирован уплотнением 18. Напорная камера 19 модульного распределителя соединена с напорной магистралью 20, раздаточная камера 21 соединена с исполнительным гидроцилиндром 22, сливная камера 12 соединена со сливной магистралью 23, а камера 24 управления соединена с командоаппаратом 25. Ручное управление распределителя осуществляется с помощью толкателя 26.
Распределитель работает следующим образом.
В исходном положении золотник 2 находится в крайнем правом положении, своим уплотнением 3 герметично разделяя напорную камеру б от раздаточной 21, которая через радиальные и осевой канал 13 соединена со сливной камерой 12. Соединенный шарнирно штифтом 9 с золотником 2 индикаторный стержень 8 находится при этом в крайнем правом положении.
При подаче давления с помощью коман- доаппарата 25 в камеру 24 управления, поршень 16 управления вместе с седлом 15 перемещается влево до упора в торцовую рабочую поверхность 14 золотника 2, в результате чего обеспечивается положительное перекрытие модульного распределителя. Дальнейшее перемещение поршня 16 управления вместе с золотником 2 осуществляется до упора во внутреннюю расточку корпуса 1. При этом напорная камера 6 соединяется с раздаточной камерой 21 и рабочая жидкость поступает к исполнительному гидроцилиндру 22, а индикаторный стержень находится в крайнем левом положении, в результате чего обеспечивается визуальный контроль переключения модульного распределителя.
При соединении камеры 24 управления
со сливом через командоаппарат 25, золотник 2 под действием пружины 5 и давления рабочей жидкости перемещается в крайнее правое положение, возвращаясь сам и перемещая индикаторный стержень 8 в исход0 ное состояние.
При ручном управлении воздействуют на толкатель 26, который перемещает поршень 16 управления вместе с седлом 15 и золотником 2 в крайнее левое положение, в
5 результате чего напорная камера 6 соединяется с раздаточной камерой 21, а сливная камера герметично изолируется от остальных камер.
Благодаря тому, что индикаторный
0 стержень 8 одним концом соединен в напорной камере 6 с золотником, а другим концом выступает за корпус 1 модульного распределителя и имеет диаметр, меньший диаметра золотника, то он частично разгру5 жает золотник от осевых усилий, образующихся за счет воздействия давления рабочей жидкости на торец золотника 2, в результате чего усилие переключения модульного распределителя в несколько раз мень0 ше, чем при отсутствии индикаторного стержня.
Такое конструктивное выполнение модульного распределителя позволяет значительно улучшить его эксплуатацию за счет
5 обеспечения визуального контроля и снижения усилия переключения.
Формула изобретения Разгрузочно-индикаторное устройство распределителя механизированной крепи,
0 содержащее корпус, в котором размещены соосно расположенные золотник с уплотнителями, защитный колпачок, индикаторный стержень, выступающий за корпус одним концом, поршень управления, напорная,
5 сливная и раздаточная камеры, отличающееся тем, что, с целью снижения усилий переключения, один конец индикаторного стержня выполнен с проточкой, ширина которой равна величине хода золотника, а дру0 гой размещен в напорной камере и связан с золотником посредством штифта, установленного перпендикулярно продольной оси золотника с возможностью взаимодействия торцов штифта с внутренней поверхностью
5 защитного колпачка, при этом соединение золотника с индикаторным стержнем выполнено с зазором между ними, а диаметр индикаторного стержня меньше диаметра золотника.
22
2025
23
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОРАСПРЕДЕЛИТЕЛЬ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2199013C2 |
| Распределительное устройство механизированной крепи | 1989 |
|
SU1789789A1 |
| Устройство для подпитки гидростойки механизированной крепи | 1988 |
|
SU1610040A1 |
| Распределительное устройство механизированной крепи | 1984 |
|
SU1198221A1 |
| Гидрораспределитель механизированной крепи | 1991 |
|
SU1834977A3 |
| Блок управления секцией механизированной крепи | 1988 |
|
SU1740683A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2006 |
|
RU2323340C1 |
| БЛОК ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ ШАХТНОЙ КРЕПИ | 2004 |
|
RU2282033C2 |
| Устройство разгрузки гидропривода механизированной крепи | 1982 |
|
SU1143854A1 |
Изобретение относится к горной промышленности и может быть использовано в системах управления гидрофицированными крепями очистных забоев угольных и горнорудных шахт. Цель изобретения - снижение усилий переключения. Разгрузочно-индика- торное устройство распределителя механизированной крепи содержит корпус 1, в котором размещены соосно расположенные золотник 2 с уплотнителем 3, защитный колпачок 4 с пружиной 5, размещенные в напорной камере (К) 6. Индикаторный стержень (ИС) 8 проходит через напорную К 6 и выступает за корпус 1. Один конец ИС 8 выполнен с проточкой 11, ширина которой равна величине хода золотника 2. Другой конец ИС 8, размещенный в напорной К 6, связан с золотником 2 посредством штифта. Диаметр ИС 8 меньше диаметра золотника 2. При подаче давления с помощью коман- доаппарата 25 в камеру 24 управления поршень 16 управления вместе с седлом 15 перемещается влево до упора в торцовую рабочую поверхность 14 золотника 2, за счет чего обеспечивается положительное перекрытие модульного распределителя. Дальнейшее перемещение поршня 16 управления вместе с золотником 2 осуществляется до упора во внутреннюю расточку корпуса 1. При этом напорная К 6 соединяется с раздаточной К 21 и рабочая жидкость поступает к исполнительному гидроцилиндру 22, а ИС 8 находится в крайнем левом положении, в результате чего обеспечивается визуальный контроль переключения модульного распределителя. Наличие и расположение ИС 8 частично разгружает золотник 2 от осевых усилий. За счет этого усилие переключения модульного распределителя в несколько раз меньше, чем при отсутствии ИС8. 1 ил. Ё Os сл сл 00 V4
6659 132
Г
I
Л 1218ПШ6 Ы5
| Гидроблок шахтной стойки | 1981 |
|
SU1180524A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Распределительное устройство механизированной крепи | 1984 |
|
SU1198221A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Клапан для регулирования давления рабочей жидкости преимущественно для гидроцилиндров секций шахтной крепи | 1983 |
|
SU1358790A3 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Секция механизированной крепи | 1976 |
|
SU769011A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
