Изобретение относится к приборостроению, может быть использовано в электромашиностроении при пропитке обмоток статоров и роторов электрических машин при автоматическом дозировании, а также в химической, пищевой и других отраслях промышленности и является усовершенствованием дозатора по авт. св. N; 1392375.
Целью изобретения является повышение точности дозирования за счет контроля подачи жидкости при перемещении поршня дозатора и работе индукторов.
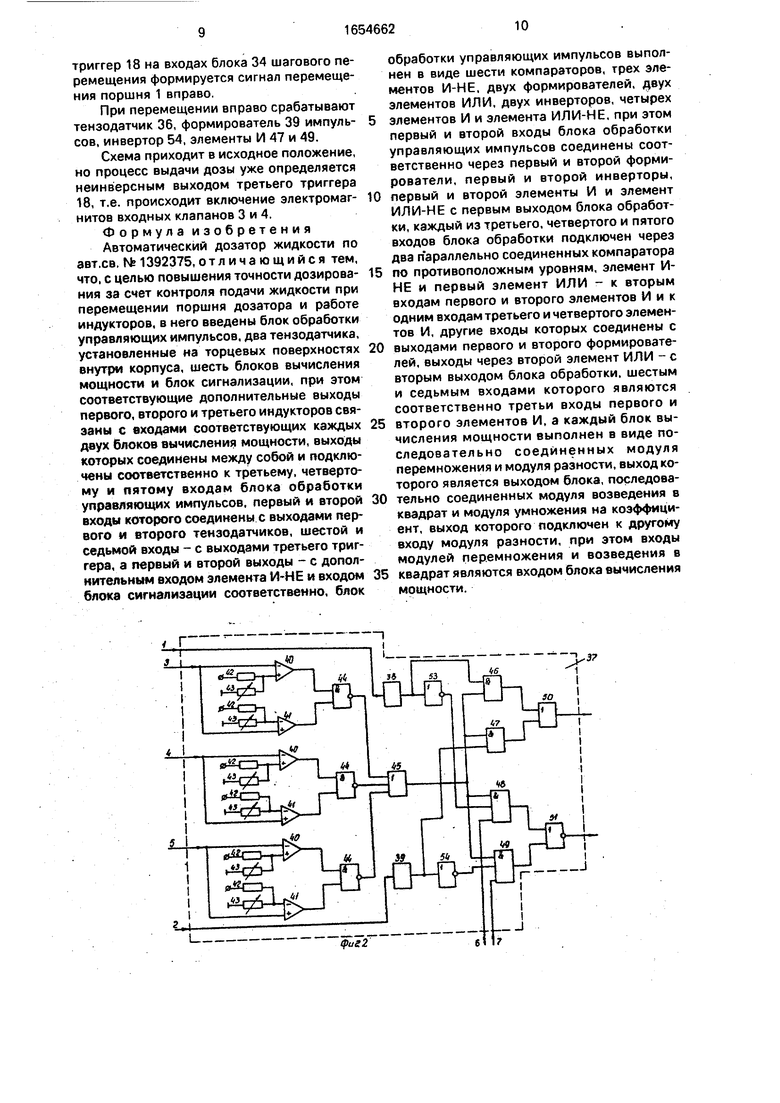
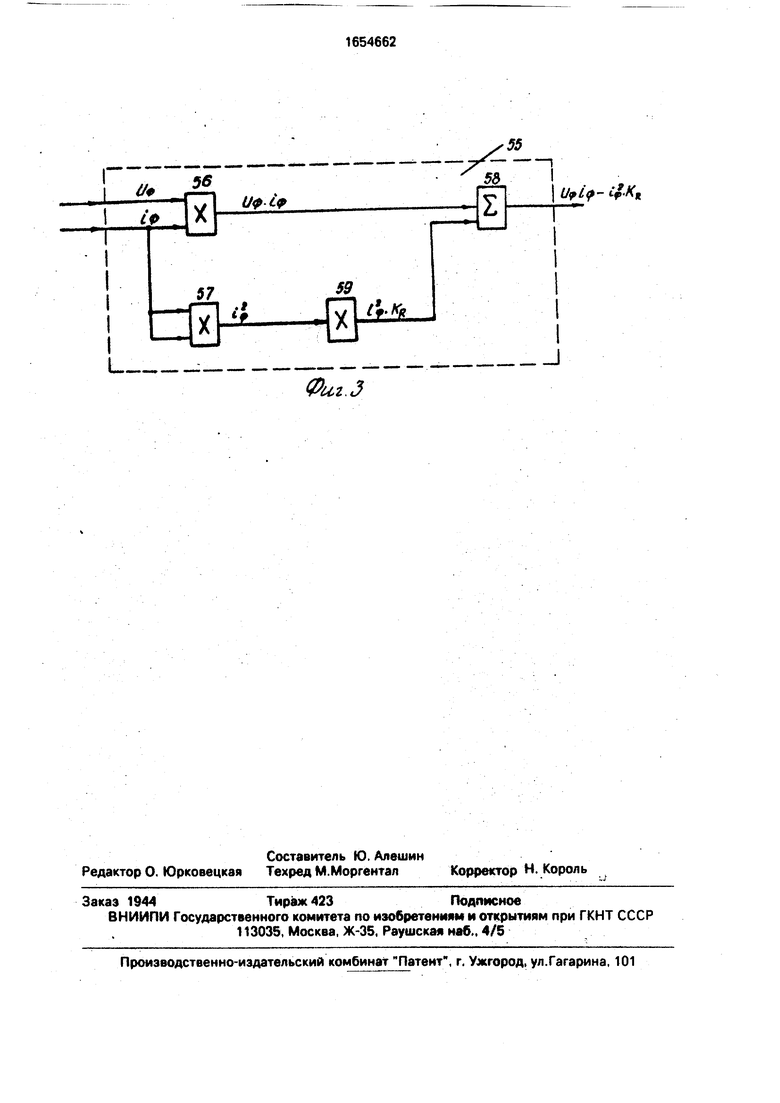
На фиг, 1 изображена функциональная схема дозатора; на фиг. 2 - схема блока обработки управляющих импульсов; на фиг. 3 - схема блока вычисления мощности.
Устройство содержит поршень 1 (фит. 1), размещенный в корпусе 2, каждая торцовая полость которого снабжена входным 3 (4) и выходным 5 (6) клапанами и датчиком 7 (8) положения поршня 1, подключенным управляющим входом к блоку управления, который выполнен в виде первого формирователя 9, выход которого подключен к первому входу первого триггера 10, выход которого соединен с входом генератора 11 переменной частоты, а второй вход первого триггера - с выходом элемента И-НЕ 12, входом сброса счетчика 13 и первым входом второго триггера 14, второй вход которого подключен через второй формирователь 15 к выходу счетчика 13. а выход - к первым входам первого 16 и второго 17 элементов И, вторые входы которых подключены к выходам третьего триггера 18, каждый вход которого соединен с выходом датчика 7 (8) положения поршня 1 и входом элемента ИЛИ 19, выход которого подключен через третий формирователь 20 и первый инвертор 21 к первому входу элемента И-НЕ 12, второй вход которого соединен с кнопкой Стоп (не показана), Выход первого элемента И 16 подключен через первый усилитель 22 к управляющему входу первого выходного клапана 5 и через вторые инвертор 23 и усилитель 24 к управляющему входу первого входного клапана 3, а выход второго элемента И 17 через третий усилитель 25 - к управляющему входу второго выходного клапана 6 и через третий инвертор 26 и четвертый усилитель 27 к управляющему входу второго входного клапана 4. Поршень 1 выполнен ферромагнитным, а привод его перемещения - в виде последовательно установленных вдоль наружной поверхности корпуса 2 индукторов 28-33, подключенных к блоку 34 шагового перемещения, первый вход.которого соединен с выходом генератора 11 переменной частоты и входом счетчика 13, а второй и третий входы - с
выходами третьего триггера 18 блока управления.
На поршне 1 выполнены канавки, заполненные уплотнителями из немагнитного
материала.
На корпусе 2 в его обеих торцовых полостях размещены тензодатчики 35 и 36, предназначенные для контроля за перемещением поршня 1. Указанные тензодатчики
соединены с первым и вторым входами блока 37 обработки (фиг. 2). который содержит на этих входах два формирователя 38 и 39 импульсов тензодатчиков. Кроме этого, блок 37 содержит три идентичные цепочки,
каждая из которых состоит из двух компараторов 40 и 41. первые входы которых являются третьим, четвертым и пятым входами блока 37. Вторые входы компараторов 40 и 41 соединены с делителями напряжения, состоящими из последовательной цепочки из резистора 42 и переменного резистора 43 и предназначенными для установления уровня опорного напряжения. Выходы компараторов 40 и 41 соединены с входами
элементов И-НЕ 44, выходы которых подключены к входам элемента ИЛИ 45. Выход последнего соединен с первыми входами четырех элементов И 46-49. Выходы первого и второго элементов И 46 и 47 подключены
к входам второго элемента ИЛИ 50. Выходы третьего и четвертого элементов И 48 и 49 подключены к входам элемента ИЛИ-НЕ 51. Выходы элементов ИЛИ 50 и ИЛИ-НЕ 51 являются выходами блока 37, первый из которых соединен с блоком 52 сигнализации, а второй - с третьим входом элемента И-НЕ 12. Вторые входы первого и второго элементов И 46 и 47 соединены с выходами первого и второго формирователей 38 и 39
импульсов тензодатчиков 35 и 36 соответственно и с входами соответствующих им инверторов 53 и 54, выходы которых подключены к вторым входам третьего и четвертого элементов И 48 и 49, третьи входы
которых являются шестым и седьмым входами блока 37 и соединены с выходами третьего триггера 18. Третий, четвертый и пятый входы блока 37 обработки управляющих импульсов соединены с тремя выходами шести
попарно соединенных блоков 55 расчета электрической мощности (фиг. 1-3).
Каждый блок 55 состоит из модуля 56 перемножения и модуля 57 возведения в квадрат, входы которых являются входами
блока 55. Выход модуля 56 перемножения подключен к входу модуля 58 разности электрических мощностей, выход которого является выходом блока 55. Второй вход модуля 58 разности электрических мощностей через модуль 59 умножения на коэффициент
соединен с выходом модуля 57 возведения в квадрат. Входы каждого блока 55 подключены к обмотке управления соответствующих им индукторов 28-33.
Индукторы 28-30 смещены по отношению к индукторам 31-33 на величину
Р (К ± -д-), где Р - период зубчатой структуры поршня 1; К - любое целое число.
Каждый из индукторов состоит из обмотки управления, двух П-обрэзных маг- нитопроводов и постоянного магнита прямоугольной формы. Индукторы имеют четыре грани ai, аз, bi, ba.
Расстояние между центральными линиями граней ai-32, равно Р (К ± -и-).
Устройство работает следующим образом.
При подаче питания, так как поршень 1 находится в крайнем правом положении. срабатывает датчик 7 положения, сигнал которого поступает на R-вход третьего триггера 18 блока управления. На инверсном выходе этого триггера появляется уровень Лог.Т, поступающий на один из входов первого элемента И 16, так как, пока на втором входе - уровень Лог.О, на выходе -тоже Лог.О. Следовательно, на выходе второго инвертора 23 формируется сигнал Лог.1, который через второй усилитель 24 включает электромагнит первого входного клапана 3. Одновременно включается электромагнит второго входного клапана 4 через элемент И 17, третий инвертор 26 и четвертый усилитель 27, так как на входах второго элемента И 17 - уровень Лог .О.
Жидкость заполняет емкость корпуса 2. Одновременно сигнал с датчика 7 положения поршня поступает на один из входов элемента ИЛИ 19. и через последовательно соединенные третий формирователь 20, инвертор 21 и элемент И-НЕ 12 происходит сброс второго триггера 14, счетчика 13 и первого триггера 10.
При появлении разрешающего сигнала на выходе первого формирователя 9 импульсов на выходе формируется импульс, который поступает на S-вход первого триггера 10, разрешающего работу генератора 11 переменной частоты. Импульсы постоянной частоты начинают поступать на вход блока 34 шагового линейного перемещения и на вход счетчика 13. В зависимости от того, какое записано число на входе счетчика 13, дозатор жидкости может выдавать полную дозу жидкости или определенную часть ее. Это зависит от момента включения электромагнита выходного клапана и отключения электромагнита входного клапана. До момента переключения электромагнитов клапанов 5 и 6 жидкость циркулирует через входные клапаны 3 и 4.
При поступлении импульсов на блок 34
шагового линейного перемещения с последнего в обмотки управления индукторов 28-30 поступает ток, в результате чего увеличивается магнитный поток, создаваемый в гранях ai и bi. Магнитный поток в гранях
0 аз и Ьа уменьшается до нуля. Поршень 1 устанавливается против граней ai и bi. При прохождении второго импульса ток подается в обмотку управления индукторов 31-33 и отключается ток в обмотках управления ин5 дукторов 28-30. Магнитный поток, создаваемый в гранях ai и bi индукторов 31-33, притягивает к себе поршень 1, который перемещается влево на 1/4 Р. Теперь на третий импульс отключается ток в обмотках
0 управления индукторов 31-33 и в обмотки управления индукторов 28-30 подается ток обратного направления, следовательно, образуется магнитный поток в гранях аи и Ь2, который перемещает поршень 1 еще на 1/4
5 Р влево. На четвертый импульс ток обратного направления подается в обмотки управления индукторов 31-33 и отключается ток в обмотках управления индукторов 28-30. Появляется магнитный поток в гранях а и b
0 индукторов 31-33, и происходит перемещение поршня 1 влево еще на 1/4 Р. После этого порядок тока в обмотки управления индукторов 28-33 повторяется. Для перемещения поршня 1 в крайнее правое положе5 ние изменяется порядок коммутации обмоток управления индукторов 28-33. Перемещение поршня 1 вправо или влево регулируется третьим триггером 18, сигналы с выходов которого поступают на блок 34 ша0 гового линейного перемещения. Одновременно с перемещением начинается отсчет счетчика 13. Как только произойдет сравнение с заданным числом, счетчик 13 через второй формирователь 15 импульсов вклю5 чает второй триггер 14. Сигнал с неинверсного выхода второго триггера 14 поступает на входы первого 16 и второго 17 элементов И. Так как на втором входе элемента И 16 уже есть уровень Лог.1, то и на выходе
0 появляется уровень Лог. 1. Это определяет включение электромагнита первого выход- . кого клапана 5 через первый усилитель 22 и отключение электромагнита первого входного клапана 3 через вторые инвертор 23 и
5 усилитель 24. Происходит выдача дозы.
В процессе перемещения влево поршня 1 происходит постоянное давление на тен- зодатчик 35 (фиг. 2), т.е. на выходе формирователя 38 импульсов появляется уровень Лог.1. Затем этот уровень Лог. Г подается на входы инвертора 53 и первого элемента И 46. в результате чего на выходе инвертора 53 появляется уровень Лог.О, поступивший на вход элемента ИЛИ-НЕ 51, на его выходе преображается в уровень Лог.1. Следовательно, команда на Стоп отсутствует. Одновременно при работе индукторов 28-33 на входы одного из блоков 55 расчета электрической мощности подаются сигналы напряжения и тока, При этом конкретному положению поршня 1 соответствует строго определенное значение тока во включенных обмотках управления. Контроль электрических параметров работы дозатора осуществляется системой электрических параметров. Измерение величины и контроль тока, протекающего через обмотку управления, осуществляются по сигналам, измеренным на измерительных сопротивлениях, включенных последовательно с этой обмоткой. Напряжение, действующее на обмотку управления, контролируется непосредственно на ее клеммах. Расчет мощности ведется по сигналам тока и напряжения, измеренным на электрических клеммах обмотки управления, в блоке 55 расчета электрической мощности в соответствии с выражением
1|-иф1ф-1ФКр,
где 11ф 1ф- мощность, потребляемая от сети;
1фКр- мощность электрических потерь на активном сопротивлении обмотки управления.
Функция 14ф 1ф определяется в модуле 56 перемножения, функция возведения в
квадрат 1ф реализуется модулем 57 возведения в квадрат, а функция произведений 1фхКр определяется модулем 59 умножения на коэффициент, равный активному сопротивлению включенной обмотки управления. Функция вычитания реализуется в модуле 58 разности электрических мощностей. Таким образом, на выходе блока 55 расчета электрической мощности появляется разность мощностей, выраженная уровнем напряжения, которая подается на один из входов (или третий, или четвертый, или пятый) блока 37.
Допустим, при поступлении сигнала на третий вход блока 37 (фиг. 2), т.е. при работе индукторов 28 и 33, он подается на входы компараторов 40 и 41, определяющие верхний и нижний уровни опорного напряжения. Если уровень поступившего сигнала находится в этих пределах, то на выходе компараторов 40 и 41 устанавливается уровень Лог.Г. т.е. на выходах соответствующего
элемента И-НЕ 44 и ИЛИ 45 появляется уровень Лог.О. Этот же уровень Лог.О через элементы И 46-49 и элемент ИЛИ 50 появляется на выходе блока 37, т.е. сигнал на про- мывку отсутствует. Таким образом, работа дозатора протекает нормально.
Так как работа дозатора сопряжена с вязкими жидкостями, то с течением времени поверхность корпуса 2 покрывается некоторой пленкой, затрудняющей перемещение поршня 1. Для исключения такой ситуации применяется отработка сигнала Промывка. При затрудненном перемещении поршня 1 происходит повышение активных потерь в обмотке управления, что, в свою очередь, уменьшает величину суммарной мощности, которая уже не соответствует уровню опорного напряжения.
Следовательно, на выходе компаратора 41 появляется уровень Лог.О, на выходах элементов И-НЕ 44 и ИЛИ 45 - уровень Лог. 1, т.е. и на входах элементов И 46-49 появляется Лог. Г.
Ввиду того, что работа тенэодатчика 35 продолжается, то и на втором входе элемента И 46 имеется уровень Лог. 1й, а следовательно, и на его выходе и на выходе элемента ИЛИ 50 также появляется уровень
Лог.Г. Таким образом, на входе блока сигнализации появляется уровень Лог. Г, т.е. выдается команда на промывку.
В случае заклинивания поршня 1 давление на тензодатчик 35 прекращается. Следовательно, на выходе инвертора 53 и на втором входе третьего элемента И 48 появляется уровень Лог.Г. Так как активные потери в обмотках управления также велики, то на выходе элемента ИЛИ 45 и на
вторых входах элементов И 46-49 тоже устанавливается Лог.Г, которая подается на вход элемента И-НЕ 51. с выхода которого уровень Лог.О поступает на третий вход элемента И-НЕ 12. В результате происходит
сброс указанных элементов, и работа установки прекращается.
При перемещении поршня 1 справа на лево, так как тензодатчик 36 не работает,
сигнал через элемент И 49 на отключение установки исключается ввиду того, что на его третий вход поступает уровень Лог.О от третьего триггера 18.
При перемещении поршня 1 в крайнее
левое положение срабатывает датчик 8 положения поршня, который через элемент ИЛИ 19, третий формирователь 20, первый инвертор 21 и элемент И-НЕ 12 формирует сброс второго триггера 14. счетчика 13 и первого триггера 10. Также через третий
триггер 18 на входах блока 34 шагового перемещения формируется сигнал перемещения поршня 1 вправо.
При перемещении вправо срабатывают тензодатчик 36, формирователь 39 импуль- сов, инвертор 54, элементы И 47 и 49.
Схема приходит в исходное положение, но процесс выдачи дозы уже определяется неинверсным выходом третьего триггера 18, т.е. происходит включение электромаг- нитов входных клапанов 3 и 4.
Формула изобретения
Автоматический дозатор жидкости по авт.св. № 1392375,отличающийся тем, что, с целью повышения точности дозирова- ния за счет контроля подачи жидкости при перемещении поршня дозатора и работе индукторов, в него введены блок обработки управляющих импульсов, два тенэодатчика, установленные на торцевых поверхностях внутри корпуса, шесть блоков вычисления мощности и блок сигнализации, при этом соответствующие дополнительные выходы первого, второго и третьего индукторов связаны с входами соответствующих каждых двух блоков вычисления мощности, выходы которых соединены между собой и подключены соответственно к третьему, четвертому и пятому входам блока обработки управляющих импульсов, первый и второй входы которого соединены с выходами первого и второго тензодатчиков, шестой и седьмой входы - с выходами третьего триггера, а первый и второй выходы - с дополнительным входом элемента И-НЕ и входом блока сигнализации соответственно, блок
обработки управляющих импульсов выполнен в виде шести компараторов, трех элементов И-НЕ, двух формирователей, двух элементов ИЛИ. двух инверторов, четырех элементов И и элемента И Л И-НЕ. при этом первый и второй входы блока обработки управляющих импульсов соединены соответственно через первый и второй формирователи, первый и второй инверторы, первый и второй элементы И и элемент ИЛ И-НЕ с первым выходом блока обработки, каждый из третьего, четвертого и пятого входов блока обработки подключен через два параллельно соединенных компаратора по противоположным уровням, элемент И- НЕ и первый элемент ИЛИ - к вторым входам первого и второго элементов И и к одним входам третьего и четвертого элементов И, другие входы которых соединены с выходами первого и второго формирователей, выходы через второй элемент ИЛИ - с вторым выходом блока обработки, шестым и седьмым входами которого являются соответственно третьи входы первого и второго элементов И, а каждый блок вычисления мощности выполнен в виде последовательно соединенных модуля перемножения и модуля разности, выход которого является выходом блока, последовательно соединенных модуля возведения в квадрат и модуля умножения на коэффициент, выход которого подключен к другому входу модуля разности, при этом входы модулей перемножения и возведения в квадрат являются входом блока вычисления мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический дозатор жидкости | 1986 |
|
SU1392375A1 |
| Устройство для многокомпонентного дозирования компонентов синтетических моющих средств | 1990 |
|
SU1805454A1 |
| Устройство для ввертывания сердечников в катушки | 1987 |
|
SU1642531A1 |
| Запоминающее устройство с контролем и коррекцией ошибок | 1983 |
|
SU1117715A1 |
| Устройство для цифрового программного управления позиционным приводом | 1984 |
|
SU1244637A1 |
| Интегральное устройство для управления вторичным источником питания | 1987 |
|
SU1538211A1 |
| Многофазный параметрический стабилизатор постоянного напряжения | 1989 |
|
SU1658130A1 |
| Электропривод постоянного тока | 1990 |
|
SU1741247A1 |
| Устройство для измерения частоты и периода гармонического сигнала | 1991 |
|
SU1797714A3 |
| Устройство управления протравливателем семян | 1990 |
|
SU1741634A1 |
Изобретение относится к приборостроению и может быть использовано в электромашиностроении при пропитке обмоток статоров и роторов электрических машин при автоматическом дозировании, а также в химической, пищевой и других отраслях промышленности. Цель изобретения - повышение точности дозирования за счет контроля подачи жидкости при перемещении поршня дозатора и работе индукторов. Поршень 1 размещен в корпусе 2, каждая торцовая полость которого снабжена входным 3 (4) и выходным 5 (6) клапанами и датчиком 7 (8). Блок управления выполнен в виде формирователей, триггеров, генератора переменной частоты, усилителей, инвертора. Поршень 1 выполнен ферромагнитным, а привод его перемещения - в виде последовательно установленных вдоль наружной поверхности корпуса 2 индукторов 28-33, подключенных к блоку 34 шагового перемещения, связанному с блоком управления. В корпусе 2 на торцовых полостях расположены тенэодатчики 35, 36. связанные с блоком 37 обработки. 3 ил. fe Os ел Jb Os Os ю ю Фиг1
Фиг2
I.I
Фиг.З
| Автоматический дозатор жидкости | 1986 |
|
SU1392375A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
