Изобретение относится к измерениям осадки движителя лесных гусеничных машин в грунт, преимущественно к измерению осадки движителей гусеничных трелевочных тракторов.
Цель изобретения - повышение точности измерений.
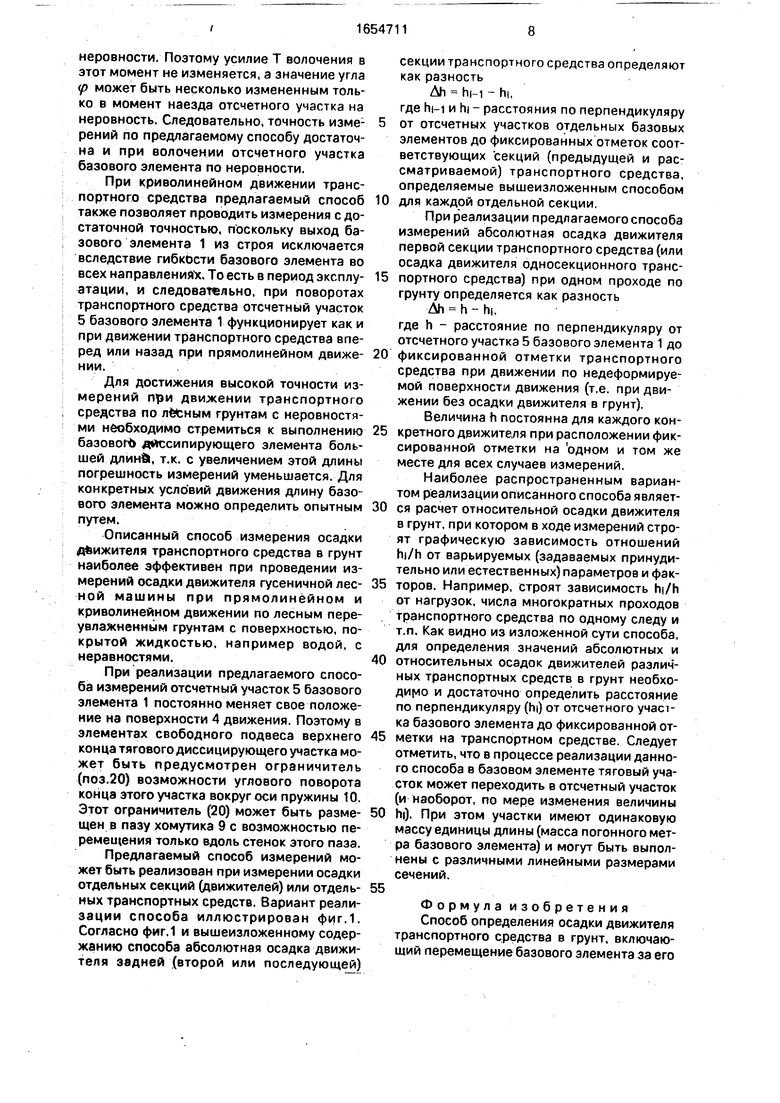
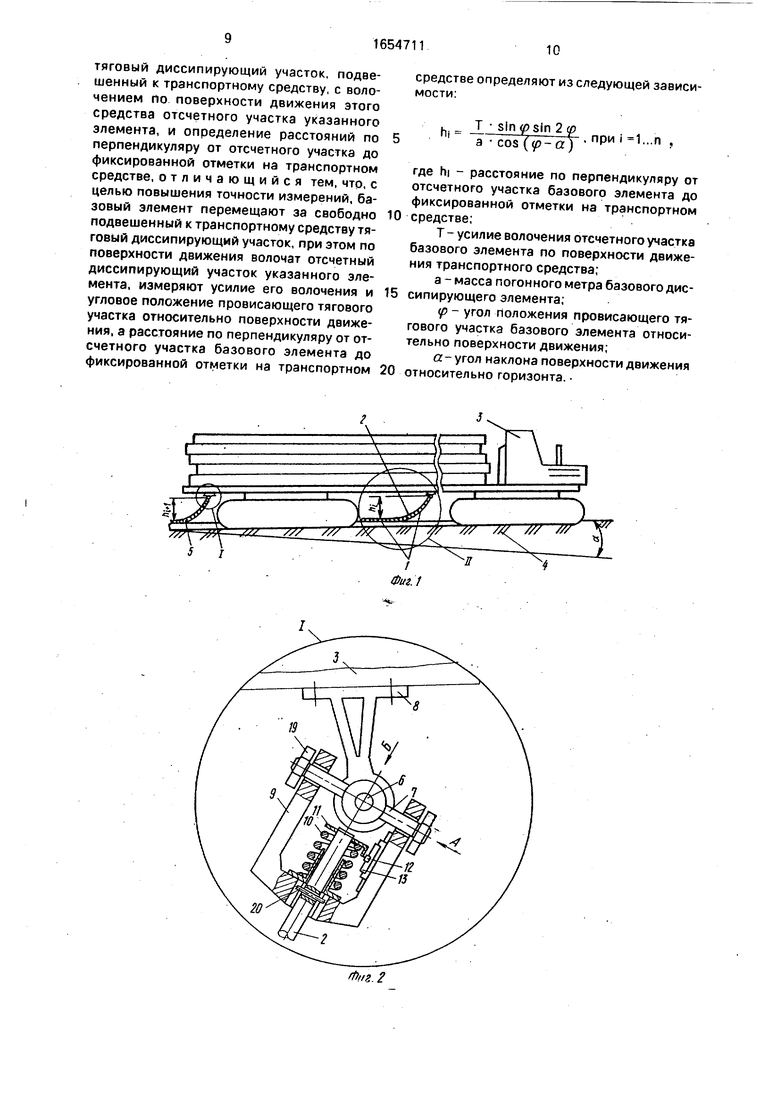
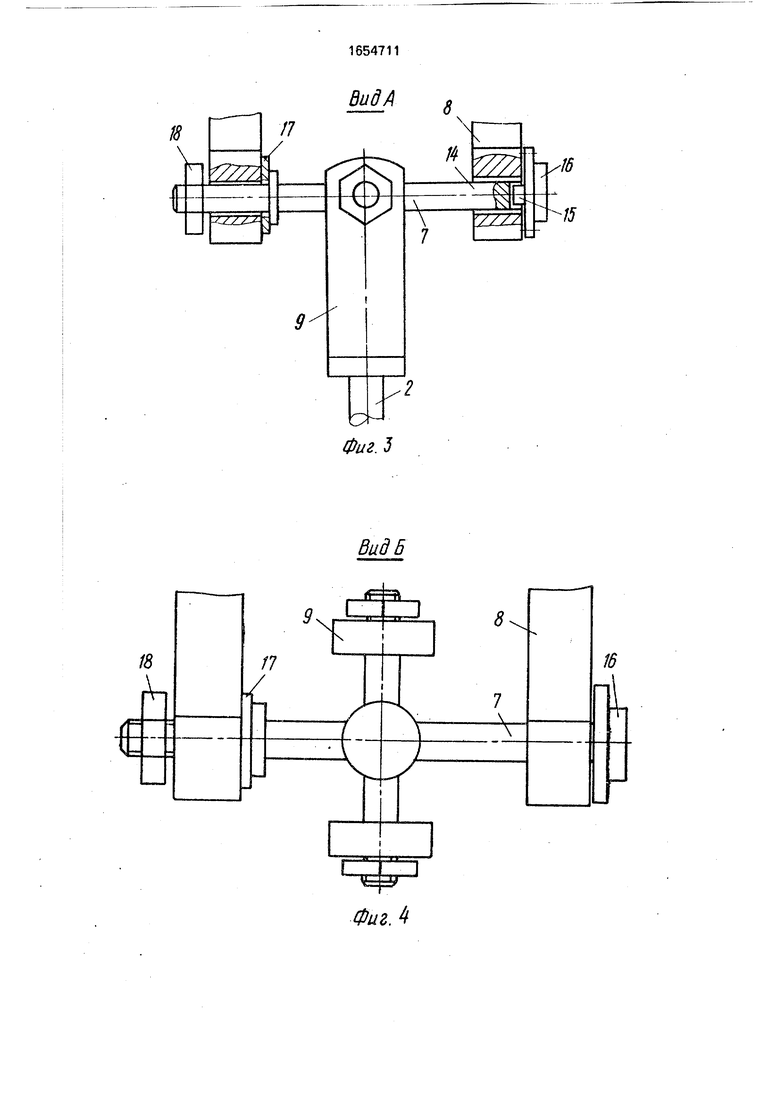
На фиг.1 - вариант реализации способа при определении осадки движителя двухсекционного гусеничного средства для транспорта леса; на фиг.2 - вариант исполнения свободного подвеса базового элемента к транспортному средству (вид сбоку с разрезом); на фиг.З - вариант исполнения свободного подвеса по фиг.2, вид снизу под углом; на фиг.4 - вариант исполнения свободного подвеса по фиг.2 и 3 (вид сверху под
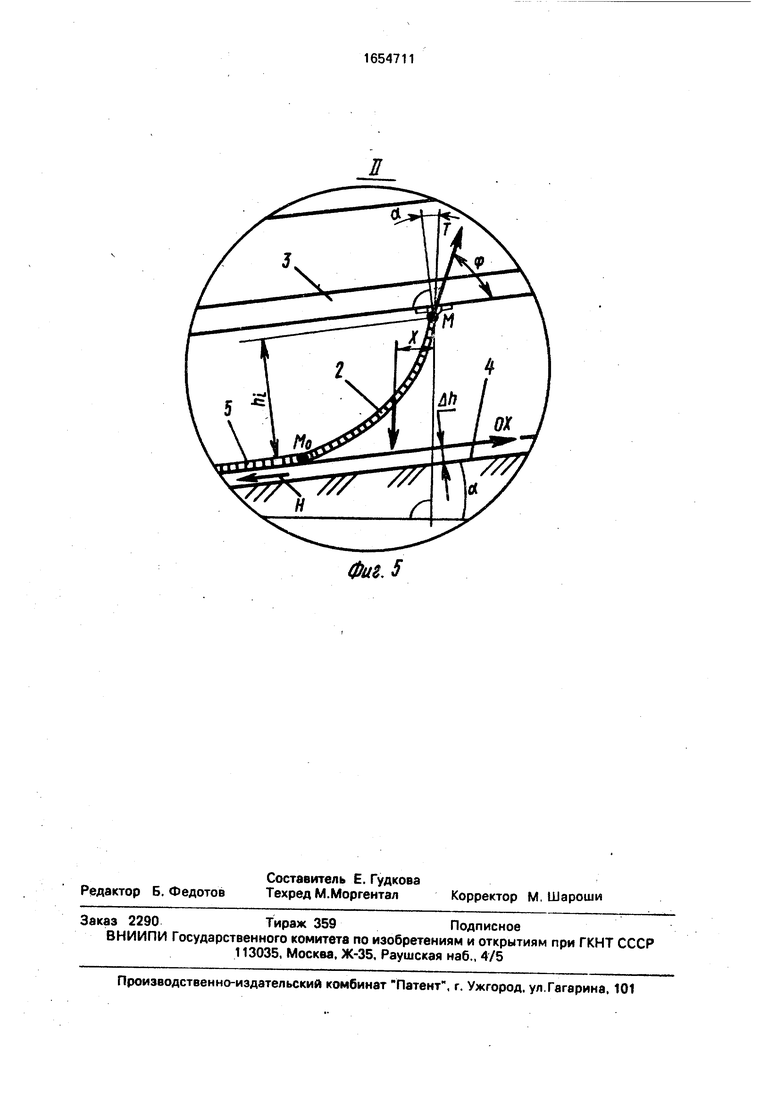
углом); на фиг.5 - вариант схемы базового элемента в ходе реализации предлагаемого способа при движении транспортного средства на подъем.
Способ определения осадки движителя транспортного средства в грунт, примеры и фрагменты реализации которого приведены на фиг 1-5, включает перемещение базового элемента 1 за его тяговый диссипирующий участок 2. подвешенный к транспортному средству 3, с волочением по поверхности 4 движения (этого средства 3) отсчетного участка 5 указанного элемента 1, и определение расстояний hi по перпендикуляру от отсчетного участка 5 до фиксированной отметки - оси 6 крестовины 7 на транспортном средстве 3. причем базовый
ON СЛ Јь ч|
элемент 1 перемещают за свободно подвешенный (например, посредством крестовины 7, кронштейна 8 и хомутика 9) к транспортному средству 3 тяговый диссипи- рующий участок 2. например, в виде цепи, каната или троса. При этом по поверхности 4 движения волочат отсчетный диссипирую- щий участок 5 указанного элемента 1, измеряют усилие Т его волочения и угловое положение if провисающего тягового участка 2 относительно поверхности 4 движения, Для определения усилия Т волочения может быть использован чувствительный элемент пружина 10, (фиг.2) установленная между хомутиком 9 и шайбой 11, жестко установленной на конце тягового диссипи- рующего участка 2 базового элемента 1. причем на шайбе 11 может быть смонтирован ползун 12, скользящий (при изменении усилия Т) по реостату 13, установленному неподвижно на хомутике 9. Как показано на фиг.З, на одной из цапф 14 крестовины 7. перпендикулярной продольной плоскости хомутика 9, может быть выполнен паз, в котором размещается поводок 15 преобразователя 16 угловых перемещений рв электрический сигнал. В качестве преобразователя может быть использован потенциометр, неподвижно монтируемый на кронштейне 8. Для обеспечения свободного углового перемещения крестовины 7 на кронштейне 8 цапфы 14 крестовины 7 устанавливают с зазором, а их осевое смещение ограничивают, например, шайбами 17 и гайками 18. Хомутик 9 аналогично имеет возможность углового поворота на цапфах крестовины 7. и его осевое смещение на цапфах ограничено, например, гайками 19. В качестве зафиксированной отметки на транспортном средстве служит ось 6 крестовины 7. Расстояние hi по перпендикуляру от отсчетного участка 5 базового элемента 1 до зафиксированной отметки 6 на транспортном средстве 3 определяют исходя из следующих соображений (см. фиг.5).
По фиг. 5 имеем следующие обобозначе- ния:
Т - усилие волочения;
Н - сила сопротивления волочению от- счетного участка 5 базового элемента 1;
S - длина тягового диссипирующего участка 2. базового элемента 1 (длина отреза МоМ);
а - масса погонного метра базового элемента 1;
а - угол наклона поверхности движения к горизонту;
(р - угол положения провисающего тягового участка 2 базового элемента 1 относительно поверхности движения;
X - плечо равнодействующей силы от силы массы провисающего участка МоМ базового элемента 1;
ОХ - ось абсцисс условной системы координат, а величина X - плечо силы aS, где S - длина участка МоМ. Согласно схеме по фиг.5,
S sln р
0,
Рассмотрим сумму сил по оси ОХ: 2 ОХ
Н
Т cos f Н + a slnor S, откуда Tcos sin a. (1)
sin (f
Рассмотрим сумму моментов относительно Т. М:
2Мтм 0; - Н hi + (1 /2 cos p) a-S cos er- -a S slna (1/2 S sin p) 0(2)
Подставив в (2) значение Н из (1) и S hi
, получим:
sin р
hi
- (Т cos (p - a - sin a) -hi +
+ (1/2.a. ,hl )a ,h| vsin sin p
x cos a - (1/2 sin a) x
35
hi
sin p
sin p 0,
После сокращений получим
hi
2 Т
sin cos p
а ( cos (f) cos a + sln -sina
0 После подстановок . Т sin p sin 2 p 1 а cos (p- а )
где a + а при движении транспортного средства на подъем;
5о. - а при движении транспортного
средства на спуск.
Рассмотрим эксплуатационные факто- ры(оказывающие ограничивающее влияние на подбор геометричерких и массовых пара0 метров базового элемента. При этом учитываем, что при реализации предлагаемого способа измерений рассматриваются лесные гусеничные машины, которые эксплуатируются на грунтах с низкой несущей
5 способностью, причем поверхность этих грунтов может быть покрыта (залита) жидкостью (водой). С учетом этого обстоятельства (при измерении осадки движителя в лесной грунт) ограничивающим является условие обязательности погружения отсчетного участка 5 базового элемента 1 в жидкость (заливающую или покрывающую поверхность движения) и обязательность непогружения отсчетного участка 5 в лесной грунт. Эти ограничения могут быть записаны следую щим образом:
d
В
и| Р
(3)
где d - объемная масса жидкости; а
-б-г объемная масса базового элеD I
мента;
b - ширина сечения базового элемента; I - толщина сечения базового э лемента: Р - несущая способность лесного грунта.
Разделив обе части неравенства (3) на величину I, получим
а
В Г
аР
-г- -г, НО Т.К. d
В
справедливо неравенство а
d
В
г
(6)
Следовательно, погонная масса а базового элемента 1 может быть подобрана с учетом неравенства (6).
Вышеизложенное обеспечивает дости жение цели.
Пример процесса измерений при реализации предлагаемого способа. При подготовке к измерениям предварительно тарируют пружину 10 с реостатом 13 при различных значениях тягового усилия Т, а также преобразователь 16. Затем к раме транспортного средства 3 (в одном или в нескольких заданных фиксированных местах) посредством кронштейна 8, крестовины 7 и хомутика 9 свободно подвешивают тяговый диссипирующий участок 2 базового элемента 1, причем между хомутиком 9 и шайбой 11 конца тягового участка устанавливают чувствительный элемент 10. Вдоль оси одной из цапф 14 крестовины 7 на кронштейне 8 устанавливают преобразователь 16.
При реализации предлагаемого-способа измерений транспортное средство совершает движение, в ходе которого за счет сил сопротивления волочению отсчетного участка 5 и появлению в связи с этим усилия Т волочения угол р стабилизируется. Следует отметить, что стабилизация угла р проис- ходит при движении транспортного средства вперед или назад и при криволинейном движении, поскольку силы сопротивления волочению возникают только при волочении отсчетного участка 5. После начала движения и подключения пружины 10 и преобразователя 16 к электроизмерительной регистрирующей аппаратуре начинается реализация предлагаемого способа из- меоений. Пои этом усилие Т волочения отсчетного участка 5 базового элемента 1
воздействует на пружину 10. которая деформируясь перемещает ползун 12 по виткам реостата 13, а измерение сопротивления реостата 13 регистрируется, например, на ос- циллографической бумаге. В то же время
0 изменение угла / положения провисающего тягового участка базового элемента 1 относительно поверхности движения посредством поворота хомутика 9 с крестовиной 7 и поворота цапф 14 на свободных
5 опорах приводит к срабатыванию пружины 16, последующему преобразованию этого угла р в электрический сигнал и регистрации этого сигнала, например, на осцилло- графической бумаге осциллографа.
0Осадку движителя транспортного средства в грунт определяют по расшифрованным (с помощью тарировочных диаграмм) осциллографическим записям сигналов значений Т и if, а затем для всех отдельных
5 реализаций процесса измерений подсчитывают значение hj по формуле
. Т sin (D sin 2 /
hi vV
а cos (p- о. )
причем абсолютное значение приращения
0 осадки (Ah) движителя транспортного средства при движении на определенном (задан- ном) опытном грунтовом участке определяется как разность между предыдущим значение г)ы и последующим значени5 ем hi, т.е.
Ah hi-i - hi
Реализация предлагаемого способа измерений возможна также при обработке и расшифровке сигналов с преобразователя
0 16 во время движения транспортного средства посредством использования бортовой вычислительной машины (нестационарной ЭВМ) и определения при этом значений hi по вышеприведенной формуле. После про5 ведения опытов с реализацией предлагаемого способа строят необходимые зависимости осадки (абсолютной или относительной) движителя от нагрузок или от числа проходов транспортного средства по
0 одному следу, а по полученным графическим зависимостям определяют степень влияния тех или иных факторов на осадку движителя в грунт.
При движении транспортного средства
5 по лесным грунтам т.е. при попадании неровности под отсчетный участок 5 базового элемента 1 большая часть длины отсчетного участка волочится по ровной поверхности движения, а меньшая - непосредственно по
неровности. Поэтому усилие Т волочения в этот момент не изменяется, а значение угла р может быть несколько измененным только в момент наезда отсчетного участка на неровность. Следовательно, точность измерений по предлагаемому способу достаточна и при волочении отсчетного участка базового элемента по неровности.
При криволинейном движении транспортного средства предлагаемый способ также позволяет проводить измерения с достаточной точностью, поскольку выход базового элемента 1 из строя исключается вследствие гибкости базового элемента во всех направления. То есть в период эксплуатации, и следовательно, при поворотах транспортного средства отсчетный участок 5 базового элемента 1 функционирует как и при движении транспортного средства вперед или назад при прямолинейном движении.
Для достижения высокой точности измерений при движении транспортного средства по лесным грунтам с неровностями необходимо стремиться к выполнению базового дйссипирующего элемента большей длинй, т.к. с увеличением этой длины погрешность измерений уменьшается. Для конкретных условий движения длину базового элемента можно определить опытным путем.
Описанный способ измерения осадки движителя транспортного средства в грунт наиболее эффективен при проведении измерений осадки движителя гусеничной лес- ной машины при прямолинейном и криволинейном движении по лесным переувлажненным грунтам с поверхностью, покрытой жидкостью, например водой, с неравностями.
При реализации предлагаемого способа измерений отсчетный участок 5 базового элемента 1 постоянно меняет свое положение на поверхности 4 движения. Поэтому в элементах свободного подвеса верхнего конца тягового диссицирующего участка может быть предусмотрен ограничитель (поз.20) возможности углового поворота конца этого участка вокруг оси пружины 10. Этот ограничитель (20) может быть размещен в пазу хомутика 9 с возможностью перемещения только вдоль стенок этого паза. Предлагаемый способ измерений может быть реализован при измерении осадки отдельных секций (движителей) или отдельных транспортных средств. Вариант реализации способа иллюстрирован фиг.1. Согласно фиг.1 и вышеизложенному содержанию способа абсолютная осадка движителя задней (второй или последующей)
секции транспортного средства определяют как разность
Дп hi-i - hi, где hi-1 и hi - расстояния по перпендикуляру
от отсчетных участков отдельных базовых элементов до фиксированных отметок соответствующих секций (предыдущей и рассматриваемой) транспортного средства, определяемые вышеизложенным способом
0 для каждой отдельной секции.
При реализации предлагаемого способа измерений абсолютная осадка движителя первой секции транспортного средства (или осадка движителя односекционного транс5 портного средства) при одном проходе по грунту определяется как разность
Ah h-hi,
где h - расстояние по перпендикуляру от отсчетного участка 5 базового элемента 1 до
0 фиксированной отметки транспортного средства при движении по недеформируемой поверхности движения (т.е. при движении без осадки движителя в грунт).
Величина h постоянна для каждого кон5 кретного движителя при расположении фиксированной отметки на одном и том же месте для всех случаев измерений.
Наиболее распространенным вариантом реализации описанного способа являет0 ся расчет относительной осадки движителя в грунт, при котором в ходе измерений строят графическую зависимость отношений hi/h от варьируемых (задаваемых принудительно или естественных)параметров и фак5 торов. Например, строят зависимость hi/h от нагрузок, числа многократных проходов транспортного средства по одному следу и т.п. Как видно из изложенной сути способа, для определения значений абсолютных и
0 относительных осадок движителей различных транспортных средств в грунт необходимо и достаточно определить расстояние по перпендикуляру (hi) от отсчетного базового элемента до фиксированной от- 5 метки на транспортном средстве. Следует отметить, что в процессе реализации данного способа в базовом элементе тяговый участок может переходить в отсчетный участок (и наоборот, по мере изменения величины 0 hi). При этом участки имеют одинаковую массу единицы длины (масса погонного метра базового элемента) и могут быть выполнены с различными линейными размерами сечений. 5
Формула изобретения Способ определения осадки движителя транспортного средства в грунт, включающий перемещение базового элемента за его
тяговый диссипирующий участок, подвешенный к транспортному средству, с волочением по поверхности движения этого средства отсчетного участка указанного элемента, и определение расстояний по перпендикуляру от отсчетного участка до фиксированной отметки на транспортном средстве, отличающийся тем, что, с целью повышения точности измерений, базовый элемент перемещают за свободно подвешенный к транспортному средству тяговый диссипирующий участок, при этом по поверхности движения волочат отсчетный диссипирующий участок указанного элемента, измеряют усилие его волочения и угловое положение провисающего тягового участка относительно поверхности движения, а расстояние по перпендикуляру от отсчетного участка базового элемента до фиксированной отметки на транспортном
средстве определяют из следующей зависимости:
Т sin 2 f 1 а со&(р-а)
при i 1...n
где hi - расстояние по перпендикуляру от отсчетного участка базового элемента до фиксированной отметки на транспортном средстве;
Т - усилие волочения отсчетного участка базового элемента по поверхности движения транспортного средства;
а - масса погонного метра базового дис- сипирующего элемента;
р - угол положения провисающего тягового участка базового элемента относительно поверхности движения;
а- угол наклона поверхности движения относительно горизонта.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения осадки опорного катка гусеничного транспортного средства в грунт | 1982 |
|
SU1073598A1 |
| Скрепер | 1975 |
|
SU796323A1 |
| Гусеничная цепь транспортного средства | 1989 |
|
SU1650511A1 |
| Устройство для определения механических параметров грунта | 1984 |
|
SU1264002A1 |
| Способ непрерывного передвижения транспортного средства с колесношагающим движителем в колесно-шагающем режиме | 1976 |
|
SU640897A1 |
| ШАГАЮЩАЯ ОПОРА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1999 |
|
RU2156712C1 |
| АМФИБИЙНОЕ СРЕДСТВО ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2019 |
|
RU2732662C1 |
| СПОСОБ ДОБЫЧИ СО ДНА ВОДОЕМОВ САПРОПЕЛЯ И ДРУГИХ НЕСВЯЗАННЫХ ГРУНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023160C1 |
| РАБОЧИЙ ОРГАН ПЛАНИРОВЩИКА | 1998 |
|
RU2134327C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
Изобретение относится к определению осадки движителей транспортных машин в грунт и может быть использовано при измерении осадки движителей гусеничных трелевочных тракторов. Цель изобретения - повышение точности измерений. Базовый элемент перемещают за свободно подвешенный к транспортному средству тяговый диссипирующий участок При этом по поверхности движения волочат отсчетный диссипирующий участок указанного элемента, измеряют усилие его волочения (Т) и угловое положение (р) провисающего тягового участка относительно поверхности движения, а расстояние (hi) по перпендикуляру от отсчет- ного участка базового элемента до фиксированной отметки на транспортном средстве определяют по математической зависимости 5 ил fe
i I
9
дрщ
Ј гпф
UAt 99t
фм, 5
| Устройство для измерения осадки опорного катка гусеничного транспортного средства в грунт | 1982 |
|
SU1073598A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
