Изобретение относится к шагающим транспортным средствам повышенной проходимости и может быть использовано для транспортировки длинномерных грузов в газовой, нефтяной и лесной промышленности.
Известны шагающие опоры для многоопорных самоходных машин и для транспортных средств повышенной проходимости, выполненные в виде шагающей опоры, содержащей несущий корпус, на котором побортно установлены шагающие движители, выполненные в виде шарнирных четырехзвенников лямбдаобразного типа, попарно связанные общими башмаками, а также силовой привод с самоблокирующимся межосевым дифференциалом (Патент РФ N 2063353, М.кл. B 62 D 57/032, 1996).
Недостатками данных шагающих опор являются низкие возможности по адаптации к неровностям грунта, из-за общих башмаков шагающих движителей и жесткой траектории их опорных точек, и довольно сложный в конструктивном отношении силовой привод с межбортовой дифференциальной связью, необходимый для каждой пары шагающих движителей.
Наиболее близким по техническому уровню и достигаемому результату является устройство в виде шагающей опоры для транспортных средств повышенной проходимости (Патент РФ N 2063354, М.кл. B 62 D 57/032, 1996). Шагающая опора содержит несущий корпус, на котором побортно установлены шагающие движители, выполненные в виде шарнирных четырехзвенников лямбдаобразного типа, попарно связанные общими башмаками, а также силовой привод, кинематически связанный с кривошипами шагающих движителей.
Недостатками данной шагающей опоры являются необходимость индивидуального силового привода для каждой пары шагающих движителей, что приводит к усложнению привода и ухудшению массогабаритных характеристик шагающей опоры, а также жесткая траектория опорных точек шагающих движителей, что при наличии общих башмаков у шагающих движителей не обеспечивает адаптацию шагающих движителей к неровностям грунта и снижает возможности шагающей опоры по проходимости.
Данная шагающая опора в случае транспортировки длинномерных грузов имеет сравнительно невысокий технический уровень, что обусловлено наличием индивидуальных приводов каждой пары шагающих движителей, это приводит к дублированию многих элементов силового привода (бортредукторов и т.п.) и при большом числе шагающих движителей ухудшает массогабаритные характеристики шагающей опоры и повышает ее стоимость, а также жесткой траекторией опорных точек шагающих движителей, что при наличии общих башмаков у каждой пары шагающих движителей лишает их возможности адаптироваться к неровностям грунта (шагающая опора в общем случае имеет только три опорные точки на грунт) и не обеспечивает достаточно низкое удельное давление на грунт, в результате снижается проходимость шагающей опоры и ограничиваются ее возможности при работе на экологически ранимом почвенном покрове.
В этой связи важнейшей задачей является создание новой системы взаимодействия шагающих движителей, побортно расположенных вдоль корпуса шагающей опоры, выполненного в виде несущих балок правого и левого бортов, попарно установленных с внешней и внутренней стороны каждой несущей балки в виде блоков шагающих движителей, снабженных одним общим башмаком и также попарно соединенными внешними и внутренними шагающими движителями, установлеными со сдвигом по фазе на пол-оборота кривошипов, жестко закрепленных на ведущих осях, выполненных в виде торсионных валов, расположенных таким образом, что ведущая ось каждого второго шагающего движителя каждой пары шагающих движителей является ведущей осью каждого первого шагающего движителя следующей пары шагающих движителей. Это обеспечит побортное объединение всех шагающих движителей в цепи шагающих движителей правого и левого борта, что исключит необходимость индивидуальных приводов каждой пары движителей и дублирование элементов силового привода. В результате, при большом числе шагающих движителей, что характерно для опор, предназначенных для транспортировки длинномерных грузов, будет иметь место снижение массы, габаритов и стоимости шагающей опоры. Кроме того, новое попарное соединение внешних и внутренних шагающих движителей посредством ведущих осей, выполненных в виде торсионных валов, выполняющих функции подвески, повышает возможности шагающей опоры по адаптации к неровностям грунта, тем самым уменьшается удельное давление на грунт, повышается проходимость и расширяются возможности шагающей опоры при работе на экологически ранимых грунтах.
Техническим результатом заявленной конструкции шагающей опоры является создание новой системы взаимодействия шагающих движителей шагающей опоры, побортно расположенных вдоль ее корпуса, выполненного в виде несущих балок правого и левого бортов, за счет попарно установленных с внешней и внутренней стороны каждой несущей балки шагающих движителей, объединенных в блоки, снабженных одним общим башмаком, и попарного соединения внешних и внутренних шагающих движителей, установленных со сдвигом по фазе на пол-оборота кривошипов, жестко закрепленных на ведущих осях, выполненных в виде торсионных валов и выполняющих функции подвески, расположенных таким образом, что ведущая ось каждого второго шагающего движителя каждой пары шагающих движителей является ведущей осью каждого первого шагающего движителя следующей пары шагающих движителей. Тем самым обеспечивается создание шагающей опоры с новым принципом взаимодействия шагающих движителей, побортно объединенных в цепи шагающих движителей, с улучшенными массогабаритными и эксплуатационными характеристиками.
Указанный технический результат достигается тем, что шагающая опора повышенной проходимости для транспортировки длинномерных грузов, содержащая корпус с побортно установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры, снабженные башмаками, шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых шарнирно соединены с корпусом, а также силовой привод, содержит шагающие движители, расположенные вдоль корпуса шагающей опоры, выполненного в виде несущих балок правого и левого бортов, жестко связанных между собой, попарно шарнирно установление с внешней и внутренней стороны каждой несущей балки, каждая пара внешних и внутренних шагающих движителей выполнена в виде блока кинематически взаимосвязанных шагающих движителей и снабжена одним общим башмаком, выполненным лыжеобразной формы, при этом внешние и внутренние шагающие движители также соединены попарно и установлены на несущей балке со сдвигом по фазе на пол-оборота кривошипов, жестко закрепленных на ведущих осях, выполненных в виде торсионных валов, расположенных перпендикулярно несущей балке, причем ведущая ось каждого второго шагающего движителя каждой пары шагающих движителей, является ведущей осью каждого первого шагающего движителя следующей пары шагающих движителей, а силовой привод кинематически связан с кривошипами только первых шагающих движителей правого и левого бортов.
Предложенная новая система взаимодействия шагающих движителей, побортно объединенных в цепи шагающих движителей, исключает дублирование элементов силового привода (бортовых редукторов, тяговых электродвигателей и т.п.). В результате, в случае большого числа движителей, что характерно для опор, предназначенных для транспортировки длинномерных грузов, имеет место существенное снижение массы, габаритов и стоимости транспортного средства.
Введение в шагающую опору новой дополнительной упругой связи между внешними и внутренними движителями посредством ведущих осей, выполненных в виде торсионных валов и выполняющих функции подвески, дает возможность опорным точкам каждой пары шагающих движителей иметь некоторую свободу при движении по траектории. Они могут отставать или опережать, в зависимости от внешних условий (неровностей грунта), опорные точки соседних шагающих движителей. При этом их вертикальное положение меняется, тем самым повышаются возможности шагающей опоры по адаптации к неровностям грунта, число башмаков, опирающихся на грунт, увеличивается, удельное давление на грунт снижается, проходимость шагающей опоры возрастает и расширяются ее возможности при работе на экологически ранимых грунтах (лес, тундра и т.п.) и грунтах с низкой несущей способностью (заболоченная местность и т.п.).
Проведенный заявителем анализ уровня техники, включающий поиск по патентам и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения, а определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволил выявить совокупность существенных по отношению к усматриваемому техническому результату отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию уровня заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники.
Следовательно заявленное изобретение соответствует требованию "изобретательский уровень".
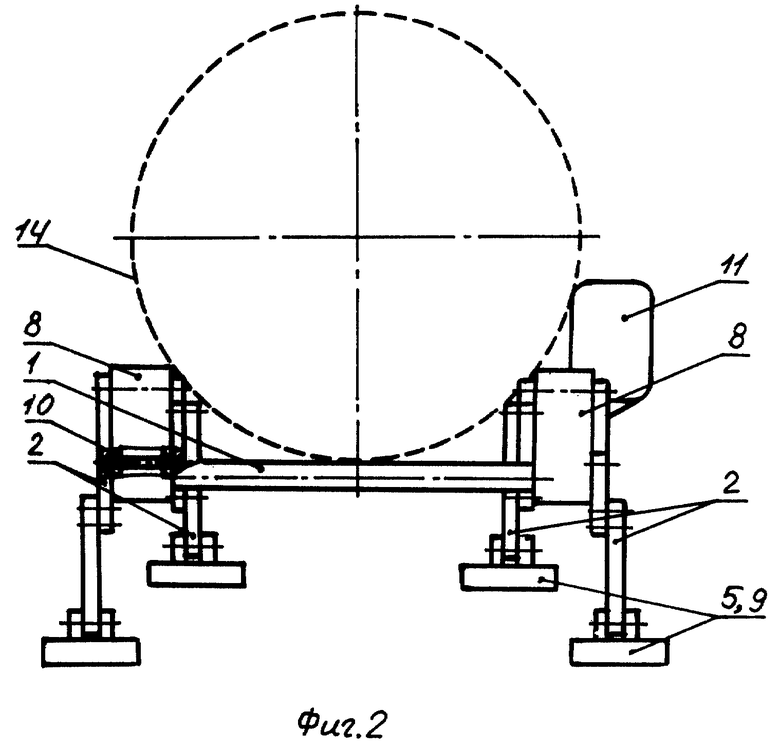
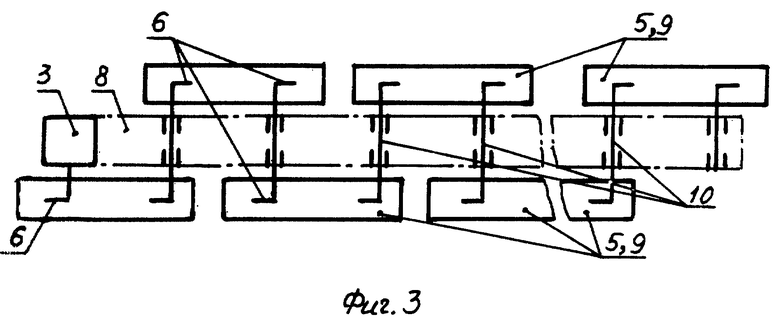
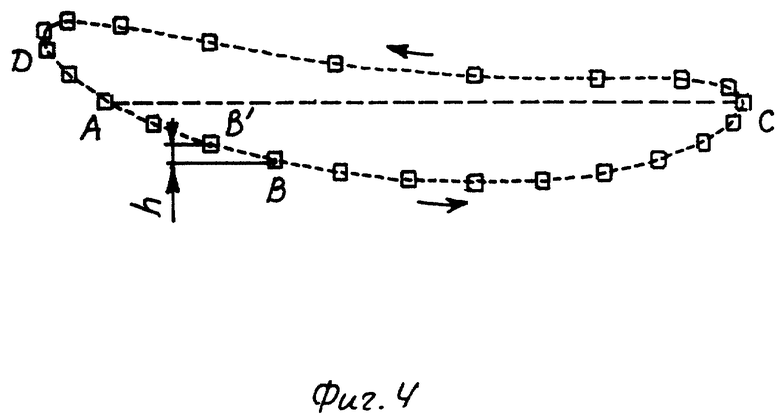
На фиг.1 представлен общий вид шагающей опоры; на фиг.2 - вид на шагающую опору слева; на фиг.3 - схема соединения шагающих движителей одного борта в общую цепь шагающих движителей; на фиг.4 - траектория опорных точек шагающих движителей.
Шагающая опора повышенной проходимости для транспортировки длинномерных грузов (фиг.1, 2) содержит корпус 1 с побортно установленным на нем шагающими движителями 2 и силовой привод 3.
Шагающие движители 2 выполнены в виде шарнирных четырехзвенников лямбдаобразного типа, содержат криволинейные опоры 4, снабженные башмаками 5, и шарнирно соединены с кривошипами 6 и качающимися рычагами 7. Свободные концы качающихся рычагов 7 шарнирно закреплены на корпусе 1. Шагающие движители 2 расположены вдоль бортов корпуса 1, выполненного в виде несущих балок 8 правого и левого бортов, жестко связанных между собой, и попарно шарнирно установлены с внешней и внутренней стороны каждой несущей балки 8. Каждая пара внешних и внутренних шагающих движителей 2 кинематически взаимосвязана, выполнена в виде блока шагающих движителей 9 и снабжена одним общим башмаком 5, выполненным лыжеобразной формы. При этом внешние и внутренние шагающие движители 2 также соединены попарно и установлены на несущих балках 8 со сдвигом по фазе на пол-оборота кривошипов 6. Кривошипы 6 жестко закреплены на ведущих осях 10, выполненных, для улучшенной адаптации шагающих движителей 2 к неровностям грунта, в виде торсионных валов, расположенных перпендикулярно несущей балке 8 и выполняющих функции подвески. Для побортного соединения всех шагающих движителей 2 в общие цепи шагающих движителей (фиг.3), ведущая ось 10 каждого второго шагающего движителя 2 каждой пары шагающих движителей 2, образующих блок шагающих движителей 9, является ведущей осью 10 каждого первого шагающего движителя 2 следующей пары шагающих движителей 2, образующих блок шагающих движителей 9. Побортное соединение шагающих движителей 2 в общие цепи шагающих движителей позволяет осуществлять привод только по одному шагающему движителю 2 каждого борта, тем самым исключается дублирование элементов силового привода 3.
Силовой привод 3 включает в себя автономный источник тока, например, дизель-генераторную установку 11, установленную на одной из несущих балок 8 корпуса 1, например, левой, и бортовые тяговые электродвигатели 12 с бортовыми редукторами 13. Силовой привод 3 может иметь и другие примеры выполнения.
Тяговые электродвигатели 13 через бортовые редукторы 13 кинематически связаны с кривошипами 6 первых шагающих движителей 2 правого и левого бортов.
Транспортируемый груз 14, например труба, устанавливается на корпусе 1 между правой и левой несущими балками 8.
Шагающая опора повышенной проходимости для транспортировки длинномерных грузов работает следующим образом. После запуска дизель-генераторной установки 11 силового привода 3 (фиг.1, 2), крутящий момент от бортовых тяговых электродвигателей 12 через бортовые редукторы 13 передается на кривошипы 6 первых шагающих движителей 2 правого и левого борта. Кривошипы 6 этих движителей начинают вращаться и приводят в движение криволинейные опоры 4 и качающиеся рычаги 7, тем самым осуществляя движение первых шагающих движителей 2. Поскольку первые шагающие движители 2 каждого борта объединены со вторыми шагающими движителями 2 в блок шагающих движителей 9 и снабжены одним общим лыжеобразным башмаком 5, то движение криволинейной опоры 4 первого шагающего движителя 2 посредством общего башмака 5 передается на криволинейную опору 4, а затем и на кривошип 6 второго шагающего движителя 2 того же борта. Тем самым осуществляется движение второго шагающего движителя 2 и всего первого блока шагающих движителей 9.
Если первая пара шагающих движителей 2 расположена с внешней стороны несущей балки 8, то вращение кривошипа 6 второго шагающего движителя 2 этой пары посредством ведущей оси 10 будет передаваться на кривошип 6 первого шагающего движителя 2 следующей пары шагающих движителей 2, расположенных с внутренней стороны несущей балки 8 и также объединенных в блок шагающих движителей 9. Тем самым осуществляется движение первого шагающего движителя второй пары шагающих движителей 2 этого же борта. Поскольку в этом блоке шагающих движителей 9 первый шагающий движитель 2 также кинематически связан со вторым посредством общего башмака 5, то движение криволинейной опоры 4 первого шагающего движителя 2 передается на криволинейную опору 4, а затем и на кривошип 6 второго шагающего движителя 2 этой же пары. Тем самым осуществляется движение второго шагающего движителя 2 и всего второго блока шагающих движителей 9.
Вращение кривошипа 6 второго шагающего движителя 2 второй пары шагающих движителей 2, расположенных с внутренней стороны несущей балки, посредством ведущей оси 10 будет передаваться на первый шагающий движитель 2 следующей пары шагающих движителей 2, расположенных с внешней стороны несущей балки 8. Аналогично передается движение и на следующие пары шагающих движителей.
Побортное объединение шагающих движителей 2 в цепи шагающих движителей исключает дублирование элементов силового привода (бортовых редукторов, тяговых электродвигателей и т.п.), тем самым достигается снижение массы, габаритов и стоимости транспортного средства.
Поскольку внешние и внутренние шагающие движители 2 установлены на несущей балке 8 со сдвигом по фазе на пол-оборота кривошипов, то либо внешние либо внутренние башмаки 5 расположены на грунте. Благодаря взаимодействию (сцеплению) башмаков 5 шагающих движителей 2 с грунтом шагающая опора начинает движение.
При движении шагающей опоры шагающие движители 2 последовательно совершают рабочий цикл, включающий рабочий ход, соответствующий участку ABC траектории опорных точек шагающих движителей 2 (фиг.4), и фазу ускоренного переноса - участок CDA траектории, включающий переходный участок DA, соответствующий входу в фазу опоры на грунт.
Каждую половину цикла работы шагающей опоры можно подразделить на следующие три основные стадии:
- внешние шагающие движители 2 находятся в фазе опоры на грунт в начале рабочего участка ABC траектории опорных точек и осуществляют рабочий ход, а внутренние шагающие движители 2 находятся в начале фазы ускоренного переноса соответствующего участку CDA траектории;
- внешние шагающие движители 2 продолжают находится в фазе опоры на грунт, продолжая осуществлять рабочий ход, а внутренние шагающие движители 2 находятся в конце фазы переноса на участке DA траектории и начинают входить в контакт с грунтом;
- внешние шагающие движители 2 проходят точку C траектории и выходят из зацепления с грунтом, внутренние заканчивают движение по участку DA траектории, достигают точки A, входят в зацепление с грунтом и начинают осуществлять рабочий ход.
После достижения опорными точками внутренних шагающих движителей точки A траектории начинается вторая половина рабочего цикла, аналогичная первой. При этом внешние шагающие движители меняются местами с внутренними. Аналогично работают и шагающие движители 2 противоположного борта, причем при прямолинейном движении скорость вращения тяговых электродвигателей 12 одинакова, а поворот шагающей опоры осуществляется путем остановки или реверсивного вращения одного из тяговых электродвигателей 12.
При движении шагающей опоры по неровному грунту дополнительная упругая связь между внешними и внутренними движителями, осуществляемая посредством ведущих осей 10, выполненных в виде торсионных валов, выполняет функции подвески. Она дает возможность опорным точкам каждой пары шагающих движителей иметь некоторую свободу при движении по траектории. Они могут отставать или опережать, в зависимости от внешних условий (неровностей грунта), опорные точки соседних шагающих движителей. При этом их вертикальное положение меняется, например, для точки B' траектории (фиг.4) на величину h по отношению к точке B. Это повышает возможности шагающей опоры по адаптации к неровностям грунта - число башмаков, опирающихся на грунт, увеличивается, а удельное давление на грунт снижается. В результате проходимость шагающей опоры возрастает и расширяются ее возможности при работе на экологически ранимых грунтах (лес, тундра и т.п.) и грунтах с низкой несущей способностью (заболоченная местность и т.п.).
После завершения рабочего цикла шагающей опоры он повторяется.
Таким образом, вышеуказанные сведения свидетельствуют о выполнении при использовании изобретения следующей совокупности условий:
шагающая опора повышенной проходимости предназначена для применения в многоопорных транспортных средствах для транспортировки длинномерных грузов, работающих на грунтах с низкой несущей способностью, причем новая система взаимосвязи шагающих движителей исключает дублирование элементов силового привода, тем самым снижает массу и стоимость опоры, и обеспечивает низкое удельное давление на грунт, что обеспечивает высокую проходимость и возможность работы на экологически ранимом почвенном покрове;
для заявленного изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью вышеописанных конструктивных решений и способов применения;
шагающая опора повышенной проходимости, воплощенная в заявленном изобретении, при его осуществлении способна обеспечить достижение усматриваемого заявителем достигаемого технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость".
Изобретение относится к транспортной технике и касается создания шагающих транспортных средств повышенной проходимости для транспортировки длинномерных грузов в газовой, нефтяной и лесной отраслях промышленности. Опора имеет корпус с побортно установленными на нем шагающими движителями в виде четырехзвенников, содержащих криволинейные опоры. Криволинейные опоры имеют лыжеобразные башмаки, шарнирно связанные с кривошипами и качающимися рычагами. Свободные концы рычагов шарнирно соединены с корпусом. Шагающая опора имеет силовой привод. Шагающие движители размещены вдоль ее корпуса. Корпус выполнен из несущих балок правого и левого бортов, жестко связанных между собой. Движители попарно и шарнирно установлены с внешней и внутренней сторон каждой несущей балки. Каждая пара внешних и внутренних движителей выполнена в виде блока кинематически взаимосвязанных движителей и снабжена одним башмаком. Внешние и внутренние движители соединены попарно и установлены на балке со сдвигом по фазе на пол-оборота кривошипов, жестко закрепленных на ведущих осях. Оси выполнены в виде торсионных валов, перпендикулярных балке. Ведущая ось каждого второго движителя каждой их пары является ведущей осью каждого первого движителя следующей пары. Силовой привод кинематически связан только с кривошипами первых шагающих движителей левого и правого бортов. Технический результат реализации изобретения заключается в создании шагающей опоры с улучшенными массогабаритными и эксплуатационными характеристиками. 4 ил.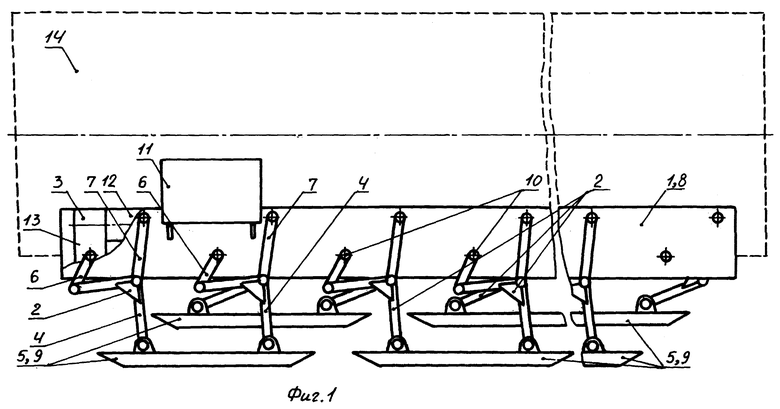
Шагающая опора повышенной проходимости для транспортировки длинномерных грузов, содержащая корпус с побортно установленными на нем шагающими движителями, выполненными в виде шарнирных четырехзвенников, содержащих криволинейные опоры, снабженные башмаками, шарнирно связанные с кривошипами и с качающимися рычагами, свободные концы которых шарнирно соединены с корпусом, а также силовой привод, отличающаяся тем, что она содержит шагающие движители, расположенные вдоль корпуса шагающей опоры, выполненного в виде несущих балок правого и левого бортов, жестко связанных между собой, попарно шарнирно установленные с внешней и внутренней стороны каждой несущей балки, каждая пара внешних и внутренних шагающих движителей выполнена в виде блока кинематически взаимосвязанных шагающих движителей и снабжена одним общим башмаком, выполненным лыжеобразной формы, при этом внешние и внутренние шагающие движители также соединены попарно и установлены на несущей балке со сдвигом по фазе на пол оборота кривошипов, жестко закрепленных на ведущих осях, выполненных в виде торсионных валов, расположенных перпендикулярно несущей балке, причем ведущая ось каждого второго шагающего движителя каждой пары шагающих движителей является ведущей осью каждого первого шагающего движителя следующей пары шагающих движителей, а силовой привод кинематически связан с кривошипами только первых шагающих движителей правого и левого бортов.
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| RU 2063898 C1, 20.07.1996 | |||
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| US 4462476 A, 31.07.1984 | |||
| СПОСОБ ЛЕЧЕНИЯ РАКА ЛЕГКИХ | 2011 |
|
RU2491064C2 |
| US 3034591 A, 15.05.1962 | |||
| DE 19530651 A1, 24.02.1997. | |||
