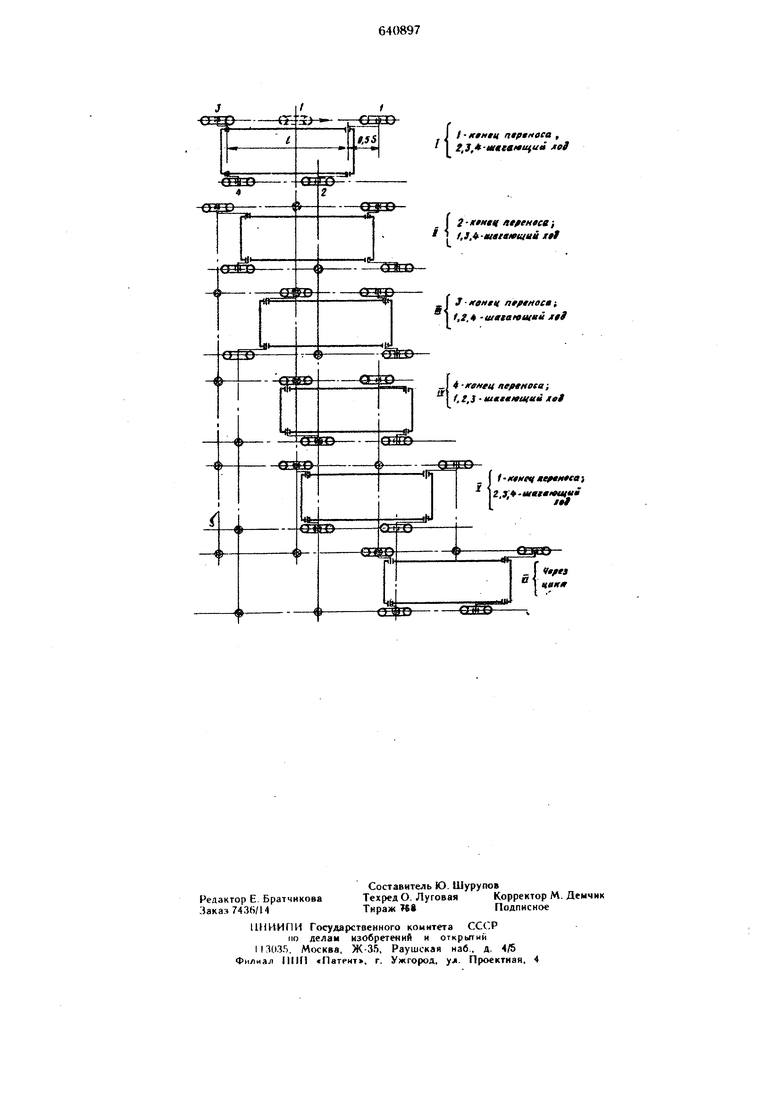
лесному шасси п - 4, с равномерной походкой и максимальным коэффициентом производительности шагания 3. При этом в любой момент времени три колеса находятся в шагающем ходе, одно перемещается по опорной поверхности в ве дущем режиме, а корпус транспортного средства перемещается непрерывно. Последовательность перемещения колес 1 - 2-3-4. Фиксированные моменты перемещений колес изображены на чертеже. Увеличение тяговых свойств достигается также при использовании режима движения, когда каждое последующее колесо перемещается в ведущем режиме по опорной поверхности в след предыдущего, зафиксированного им в щагающем ходе. При этом, каждое последующее колесо закатывается в углубление от сдвига грунта предшествующим колесом и при последующем щагающем ходе как бы продолжается сдвиг грунта, в результате чего сила тяги колеса увеличивается. Реализация этого режима определяется следующей зависимостью параметров колесно-шагающего движителя: - где Е-расстояние между одноименными точками траекторий осей рассматриваемых колес; - шаг оси колеса относительно корпуса транспортного средства; 5ю - путь сдвига колеса по грунту за щагаюший ход; I - сдвиг по фазе между рассматриваемыми колесами; численно равен порядковому номеру, которым последующее колесо. из всех колес движителя, зафиксирует положение предыдущего в рассматриваемый момент времени; а а - любое целое число, делящееся на общее число колес движителя (- характеризует число циклов, через которое последующее колесо зафиксирует след предыдущего). На чертеже показан способ передвижения с учетом режима движения след в след. Порядок перемещения колес -2-3-4, тогда 1 2, так как, например, последующее колесо 3 зафиксирует положение предыдущего I вторым после колеса 2. Кроме того, схема соответствует Z 3, п 4, 5ю 0. В общем случае величина сдвига 5ю выбирается из условия реализации максимальной тяги. На позиции Hi колесо 3 фиксирует след предыдущего I, на позиции IV колесо 4 фиксирует след предыдущего 2, на позиции V колеса 3 и 4 фиксируют след предыущих i и 2. Через один цикл передвижения, позиция IV, последующие колеса сохраняют режим движения след в след. Кроме того, увеличение тяговых свойств движителя может быть достигнуто за счет того, что колеса в шагающем ходе приведены во вращение. При этом, колеса, благодаря вращению, интенсивно погружаются в грунт, создавая хоро1иий упор для реализации значительной силы тяги. Этот режим, вследствие увеличения энергозатрат на передвижение, может использоваться в самых экстремальных условиях передвижения. Способ непрерывного передвижения транспортного средства с колесно-щагающим движителем разработан на основе расчетно-теоретических исследований, а также экспериментальных исследований на полноразмерном макете с кол.есно-шагающим движителем. Формула изобретения I. Способ непрерывного передвижения транс11бртного средства с колесно-шагающим движителем в колесно-шагающем режиме, заключающийся в последовательном перемещении колес по опорной поверхности в фазе переноса в ведущем режиме, а затем включении шагающего хода колес (фазы опоры), отличающийся тем, что, с целью увеличения свободной силы тяги, реализуемой движителем, смену этапов перемещения колес с ведущего режима на шагающий ход производят через одинаковые интервалы времени для всех колес движителя, причем время шагающего хода колеса и время его перемещения в ведущем режиме определяют по соотношению: где 1и - время шагающего хода; tfi - время перемещения колеса в ведущем режиме; п - общее число колес движителя. 2. Способ по п. 1, отличающийся тем, что каждое последующее колесо перемещают в ведущем режиме в след предыдущего колеса. .3. Способ по п. 1, отличающийся тем, что колеса в шагающем ходе приводят во вращение. Источники информации, принятые вовиимание при экспертизе: 1. Беккер М. Г. Введение в теорию системы местность-машина, М., «Машиностроение, 1973, с. 304-366.
J / ifftttn переноса , 1 f,3,-Meeeaffu(ua t
I 2- nteti/iffenfce; I l,S,-iuaiaifutiiu fft
З-квняц nfftHOC ; I /,4 -ufftafcateu Jit9
bsLcgin. l 4 чгвнец affteHota;
ft IVfrVf V u f
I Z 3 и ляЛ1а1ж/аа j
utfteieafeii tot
I l4t«ne4Meftn €a%
1,
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ передвижения транспортного средства с колесно-шагающим движителем | 1977 |
|
SU698830A1 |
| Колесно-шагающий движитель транспортного средства | 1977 |
|
SU715376A1 |
| Транспортное средство с колесно- шагающими движителями | 1978 |
|
SU725941A1 |
| Колесно-шагающий движитель транспортного средства | 1981 |
|
SU1000336A1 |
| Колесно-шагающий движитель | 1980 |
|
SU908646A1 |
| Колесно-шагающий движитель | 1980 |
|
SU948742A2 |
| Колесно-шагающий движитель | 1976 |
|
SU650877A1 |
| Колесно-шагающий движитель транспортного средства | 1975 |
|
SU596496A1 |
| Колесно-шагающий движитель | 1975 |
|
SU534386A1 |
| Колесно-шагающий движитель | 1979 |
|
SU816855A1 |