Изобретение относится к электротехнике и может быть использовано в автоматизированных электроприводах постоянного тока..
Целью изобретения является расширение функциональных возможностей за счет обеспечения как цифрового, так и частотного регулирования скорости вращения и повьшение точности .и надежности электропривода.
На фиг. 1 представлена функциональная схема электропривода ; на фиг, 2 - схема блока контроля состоянияj на фиг, 3 - схема блока управления,
Электропривод содержит электродвигатель 1 постоянного тока с установленным на его валу датчиком 2 скорости. Якорная обмотка электродвигателя 1 подключена к выходу- усилителя 3 мощности, входом соединенного с выходом блока 4 вьщ еления управляющего сигнала. Выход датчика 2 скорости подключен к информационному входу блока 4 выделения управляющего сигнала, частотный вход которого соединен с частотным выходом задатчика 5, Цифровой делит.ель 6 частот цифровым выходом подключен к цифровому входу блока 4 вьщеления управляющего сигнала, а управляемьй делитель 7 частоты щфро- вым и частотным входами соединей с соответствующими выходами задатчика 5, Информационный выход задатчика 5 подключен к первому входу цифрового делителя 6, второй вход которого соединен с выходом управляемого делителя 7 частоты, В электропривод введен блок 8 контроля состояния, первый информационный вход которого соединен с первым выходом усилителя 3 мощности, вьшолненного в виде широтно-им- пульсного преобразователя. Второй информационный вход блока 8 контроля состояния соединен с выходом переполнения цифрового делителя 6 частот,„. Индикатор .9 входом подключен к выходу блока 8 контроля состояния. Первый синхронизирующий вход блока 8 контроля состояния соединен с вторым выхо- дом усилителя 3 мощности, а второй синхронизирующий вход - с информационным в ыходом задатчика 5, Кроме того, электропривод содержит блок 10 управления, входы которого подключены к выходу датчика 2 скорости и информационному выходу задатчика 5, Первый выход блока 10 управления соединен с третьим входом цифрового делителя 6
частот и управляющим входом блока 4 вьщеления управляющего сигнала, а второй выход подключен к второму входу индикатора 9,
Блок 8 (фиг, 2) может быть выполнен, например, в виде двух D-тригге- ров 11 и 12 и элемента ИЛИ 13, входы которого подключены к выходам триггеров. На синхронизирующие входы (С- входы триггеров 11 и 12 подаются соответственно входной сигнал f., и
- Of
сигнал с выхода генератора широтно-им пульсного преобразователя 3,
Блок 10 управления (фиг, 3) состоит из триггеров 14 и 15, выходы которых подключены к элементу ИЛИ 16, двух счетчиков 17 и 18, обнуляющие входы которых соединены соответственно с выходами элементов 19 и 20, а выходы - с входами элемента ИЛИ 21, Счетные входы счетчиков 17 и 18 подключены к генератору 22, а выход элемента ИЖ 21 соединен с входом триггера 14, Входной сигнал f подается одновременно на вход триггера
15и на один из входов элемента ИЖ 20, Второй вход элемента 20 соединен с выходом элемента ИЖ 16 (первым выходом блока управления) и одним из входов элемента ИЖ 19, второй вход которого соединен с выходом датчика 2 скорости. Выход триггера 14 (второй выход блока управления) подключается к одному из входов индикатора 9,
Индикатор 9 предназначен для индикации (световой, звуковой) остановки привода и выхода системы из рабочего состояния.
Электропривод работает следующим образом.
Перед началом работы с помощью задатчика 5 на цифровом входе управляемого делит еля 7 частоты устанавливается код К, При включении на выходе триггера 14 появляется напряжение уровня 0,° а на выходе триггера 15 и элемента ИЖ
16- напряжение уровня 1, Сигнал частотой частотного вькода задатчика поступает на частотные входы управляемого делителя 7 частоты и блока 4 вьщеления управляющего сигнала. При этом на входе цифрового делителя 6 частот появляются импульсы частотой fy, , Далее с помощью задатчика 5 входные импульсы частотой начинают поступать на первые
входы цифрового делителя 6 частот и блока 10 управления.
При появлении первого импульса чатотой fg триггер 15 блока 10 управ- ления (фиг. 3) изменяет свое состояние - переходит из состояния 1 в . состояние О. При этом на первом выходе блока 10 управления формируется сигнал Пуск (схема ИЛИ 16 пере- ходит из состояния 1 в состояние О), по которому на цифровом выходе цифрового делителя 6 частот устанав- лива.ется начальный код N, а блок 4 начинает формировать управляющий
сигнал, подаваемый через усилитель 3 мощности на электродвигатель 1. Вал двигателя начинает вращаться, и сигналы от датчика 2 скорости вращения с частотой, пропорциональной скорости вращения, начинают поступать на информационный вход блока 4 вьщеления управляющего сигнала и на второй вход (один из входов элемента ИЛИ 19) блока 10 управления. При появлении вто- рого импульса входного сигнала f цифровой делитель 6 частот вычисляет значение кода N, поступающего на цифровой вход блока 4 вьщеления управляющего сигнала: N . В даль нейшем смена информации на цифровом входе блока 4 происходит с -частотой « Через некоторое время, зависящее от постоянной времени привода, частота дц вращения вала электродви- гателя устанавливается равной: дц аК-f цу , что следует из соотношений:
АЬ
a-f. N- ;
f r/K;
N
ex
где а - коэффициент пропорциональ- ности, зависящий от параметров двигателя; ;
f-P - частота тактовых импульсов, К - входной код управляемого делителя 7 частоты; fg - частота входного сигнала
электроприводаJ
N - код на цифровом входе блока 4.
Таким образом, в установившемся режиме частота дц прямо пропорциональна частоте fg входного сигнала и цифровому коду К. Одним из достоинств данного технического решения
с(. 1015
20 , 25-зоЁ
40
45 gQ
gg
является отсутствие зависимости скорости вращения двигателя от опорной частоты f , поскольку при этом нестабильность частоты f не оказывает влияния на точность регулирования,
В процессе работы сигналы частотой f.g и fg поступают на входы блока 10 управления и, проходя через элементы 19 и 20, периодически обнуляют счетчики 17 и 18, на счетные входы которых поступают импульсы от генератора 22. При отсутствии в течение заданного вр емени ( 5 , з ) входных импульсов (или импульсов от датчика 2 скорости) на выходе счетчика 18 (17) появляется сигнал уровня 1, который через элемент ИЛИ 21 поступает ha вход триггера 14 и переводит последний в состояние 1. Сигнал с выхода триггера 14 (второго, выхода блока управления) поступает на индикатор для индикации (световой, звуковой) факта отсутствия импульсов частотой fgj( или де. Изменение состояния триггера 14 вызывает появление на выходе элемента ИЛИ 16 напряжения уровня 1, которое поступает на управляющий вход блока 4/ вьщеления управляющего сигнала. При этом на выходе блока 4 формируется управляющий сигнал, который через усилитель 3 мощности подается на электродвигатель 1, вы- зьгаая остановку последнего.
Интервалы времени t j и Г, задаются путем установки соответствующей частоты генератора- 22 и кодов м , М на счетчиках 17 и 18. Если подсчитанное счетчиком (17 или 18) число импульсов оказывается равным заданным значениям (М или М), на выходе .: счетчика появляется напряжение уровня 1.
Если в процессе работы значение цифрового кода N, вычисленного циф- ровым делителем 6 частот, достигает заданного максимального значения К,„, на выходе переполнения цифрового делителя 6 частот появляется напряжение уровня 1, поступающее на D-вход триггера 11, которьй, при проходе на С-вход очередного входного импульса частотой fцх, изменяет свое состояние с О на 1. При этом на ивди- каторе 9 появляется световой (зву- , ковой) сигнал с выхода системы за нижнюю границу диапазона регулирования, а на цифровом выходе цифрового делителя 6 частот формируется код
N N, при котором частота вращения электродвигателя поддерживается равной нижнему граничному значению
Ав.п;ц
В процессе работы электропривода импульсы с выхода широтно-импульс- ного преобразователя (положительной полярности длительностью См) поступают на D-вход триггера 12, а на С-вход .триггера 12 подаются импульсы (положительной полярности) частотой г m,j с Выхода генератора ШИП. При С и.сТщ,,, на .выходе триггера 12 сохраняется сигнал уровня О. Если же сГа%-Тщ,„ , то триггер 12 изменяет свое состояние с О на Г . При этом на индикаторе 9 появляется сигнал о том, что система вышла за верхнюю границу диапазона регулирования.
Регулироваьше скорости вращения в электроприводе может производится по двум входам - цифровому и частотному благодаря чему расширяются- функциональные возможности устройства, в частности обеспечивается возможность регулирования частоты fig вращения электродвигателя пропорционально изменению частоты .fgj входного сигнала с регулируемьм при помощи цифрового кода отношением частот ДВ/ЕВХ
Повьшение точности регулирования достигается за счет оперативного контроля нахождения электропривода в ра- бочем состоянии.:При выходе системы из рабочего состояния фактическое значение частоты дц вращения электродвигателя отютоняется от расчетного (предписанного) значения fдво Появляющаяся при этом ошибка в десятки раз превышает ошибку регулирования, имеющую место при нахождении электропривода в рабочем состоянии. Благодаря контролю рабочего состояния появляется возможность предотвратить выход системы из р-абочего состояния и, следовательно, повысить точность регулирования частоты вращения электропривода .
Повышение надежности-работы достигается за счет автоматической остановки электропривода при аварийных ситуациях (например, при заклинивании вала электродвигателя и т.п.), а также за сче.т поддержания частоты вращения электродвигателя, равной нижнему граничному значению N N, что позволяет обеспечить устойчивую работу электропривода при
выходе системы за нижнюю границу рабочего диапазона.
Кроме того, в предлагаемом элект- роприводе изменение частоты -вращения электродвигателя прямо пропорционально входному коду и отсутствует зависимость частоты вращения электродвй-- гателя от частоты тактовых импульсов, т .е. нестабильность частоты f не
оказьшает влияния на точность регулирования, а следовательно, нет необходимости в использовании кварцевого генератора.
Формула изобретения
1. Электропривод, содержащий электродвигатель постоянного тока с установленным на его валу датчиком скорости, якорная обмотка электродвигателя подключена к выходу усилителя мощности, входом соединенного с выходом блока вьщеления управляющего сигнала, выход датчика скорости подключен к информационному входу блока вьщеления управляющего сигнала, частотный вход которого соединен с частотным выходом задатчика, отличающ и и с я тем, что, с целью расширения функциональных возможностей за счет обеспечения как цифрового, так и частотного регулирования скорости вращения, в него введены цифровой
делитель частот, цифровым выходом .подключенный к цифровому входу блока выделения управляющего сигнала, и управляемый делитель частоты, цифро-, вой и частотный входы которого соедийены с соответствующими выходами задатчика, информационным выходом подг ключенного к первому входу цифрового де 1ителя частот, второй вход которого соединен с выходом управляемого делителя частоты.
I .
2. Электропривод по п. 1, о т л ичающийся тем, что, с целью повышения точности регулирования, в него введены блок контроля состояния, первый информационньй вход которого соединен с первым выходом усилителя мощности, а второй информационный вход - с выходом переполнения цифро- вого делителя частот, и индикатор, один из входов которого подключ ен к выходу блока контроля состояния, причем первый синхронизирующий вход блока контроля состояния соединен с вторым выходом усилителя мощности, а второй синхронизирующий вход - с информационным выходом задатчика.
3.Электропривод поп. 1, отличающийся тем, что усилитель мощности выполнен в виде широтно-им- пульсного преобразователя.
4.Электропривод по п. 1, отличающийся тем что, с целью
повьппения надежности работы, в него введен блок управления, входы которого подключены к выходу датчика ско рости-и информационному выходу задатчика, первый выход блока управления соединен с третьим входом цифрового делителя частот и с управляющим дом блока вьщеления управляющего сигнала, а второй выход подключен к второму входу индикатора.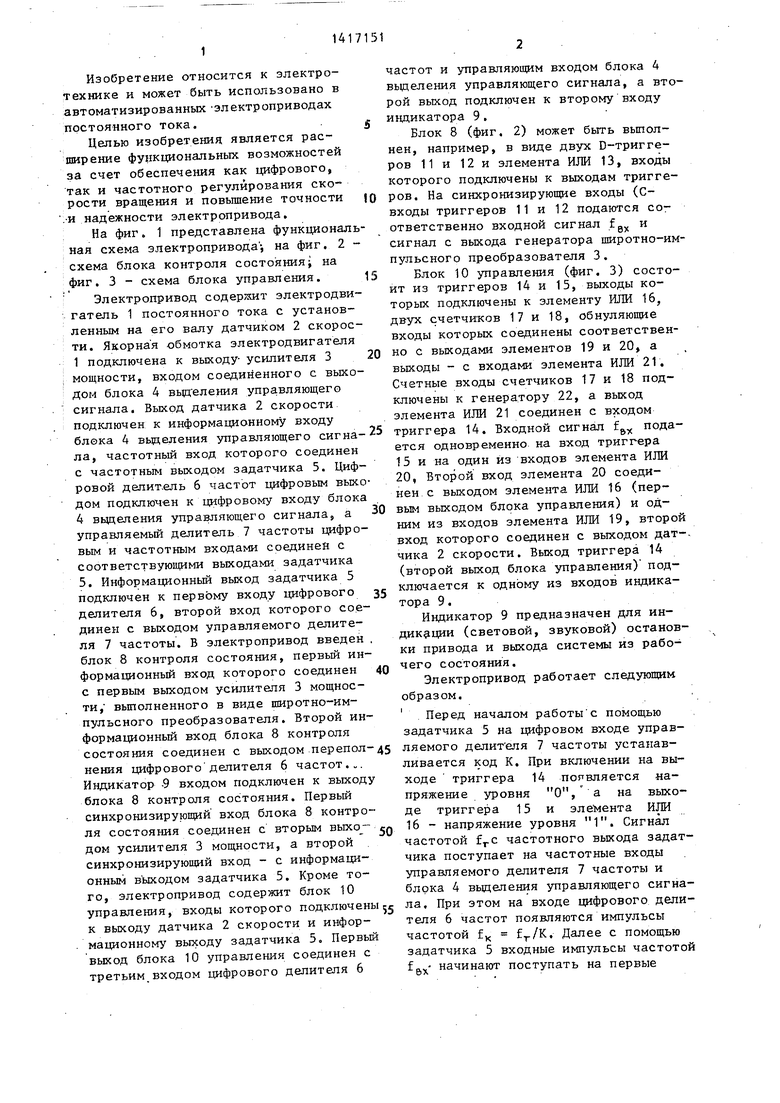
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозирующая система сельскохозяйственной распределительной машины | 1988 |
|
SU1655325A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Гистерезисный электропривод | 1984 |
|
SU1261078A1 |
| Дозирующая система сеялки | 1985 |
|
SU1329649A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Цифровая система регулирования частоты вращения двигателя постоянного тока | 1986 |
|
SU1386959A1 |
| Цифровой элетропривод | 1986 |
|
SU1399876A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Электропривод | 1987 |
|
SU1434532A1 |

Изойретение относится к элект- ротех1шке и м.б. использовано в автоматизированных электроприводах постоянного тока. Цель изобретения - расширение) функциональных возможное- , тей за счет обеспечения как цифрового, так и частотного регулирования и повьппение точности и надежности электропривода. Электропривод содержит последовательно соединенные датчик 2 скорости, электродвигатель 1 постоянного тока, усилитель 3 мощности, блок- 4 выделения управляющего сигнала, частотный вход которого подключен к задатчику 5, и снабжено цифровым де.лителем 6 частот и управляемым делителем 7 частот. При появлении первого импульса частотой fg от задатчика 5 на выходе блока 10 управления фор-;, мируется сигнал Пуск. Блок 4 формирует управляющий сигнал, к-рый через усилитель 3 подается на электро- двигатель 1. Сигналы от датчика 2 скорости поступают на информационный вход блока 4 и на второй вход блока 9 управления. Цифровой делитель 6 частот вычисляет значение кода N,поступающего на цифровой вход блока 4, смена информации на к-ром происходит с частотой f ex В электроприводе предусмотрен контроль рабочего состоя Н1 1Я с помощью блока 8, что повьш1ает точность электропривода. Повышение надежности достигается за счет автоматической остановки электропривода при аварийных ситуациях и поддержания частоты вращения электродвигателя, равной нижнему граничному значению, что позволяет обеспечить устойчивую работу при выходе системы за нижнюю границу рабочего диапазона, 3 з.п. ф-лы, 3 ил. - о (Л :л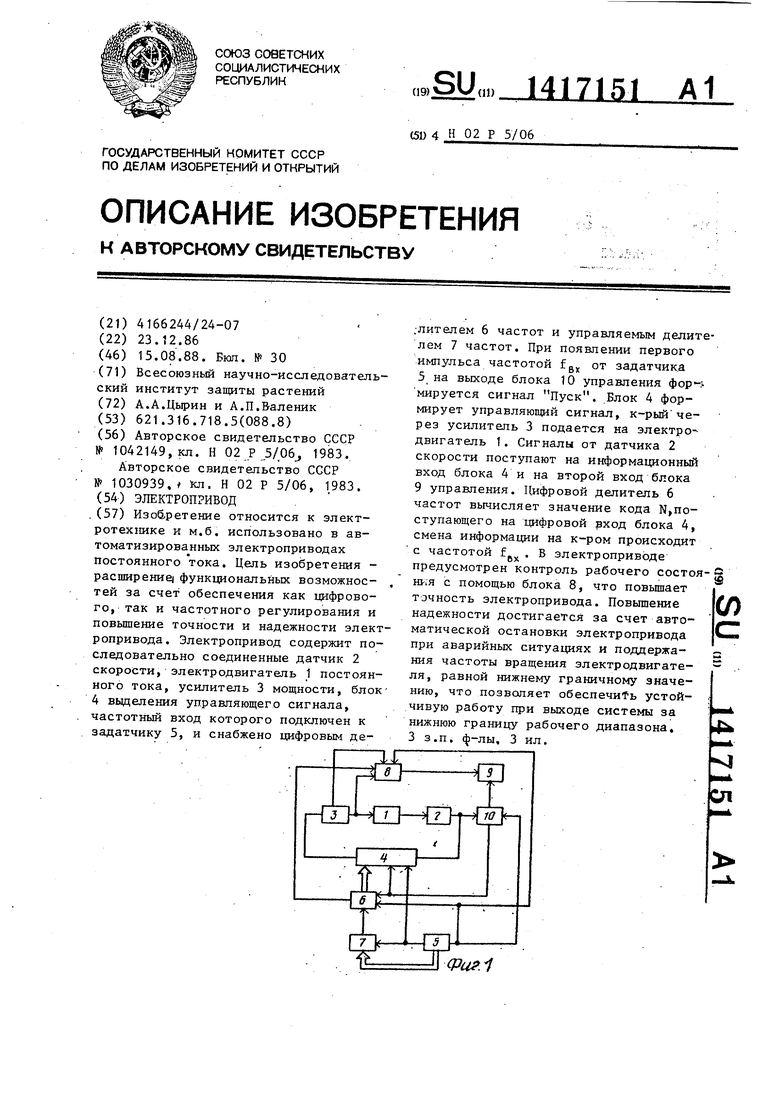
B)roffl
V /ЛЛ/6//7
иг,2
7S
iT
V/Л.
f dlr/XG f
Составитель Т.Рожкова Редактор А.Лежнина Техред М.Ходанич
Заказ 4076/55
Тираж 583
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раувхская наб., д. 4/5
20
16
г
Корректор Н.Король
Подписное
| Цифровой электропривод | 1981 |
|
SU1042149A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровой электропривод постоянного тока | 1982 |
|
SU1030939A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
