Изобретение относится к автоматизации производственных процессов и может быть использовано в производстве изделий микроэлектроники для перемещения миниатюрных изделий, например полупроводниковых кристаллов при загрузке их в кассету после снятия с липкого носителя
Цель изобретения - повышение надежности работы механизма за счет точной настройки скорости перемещения исполнительного органа и ее стабилизации
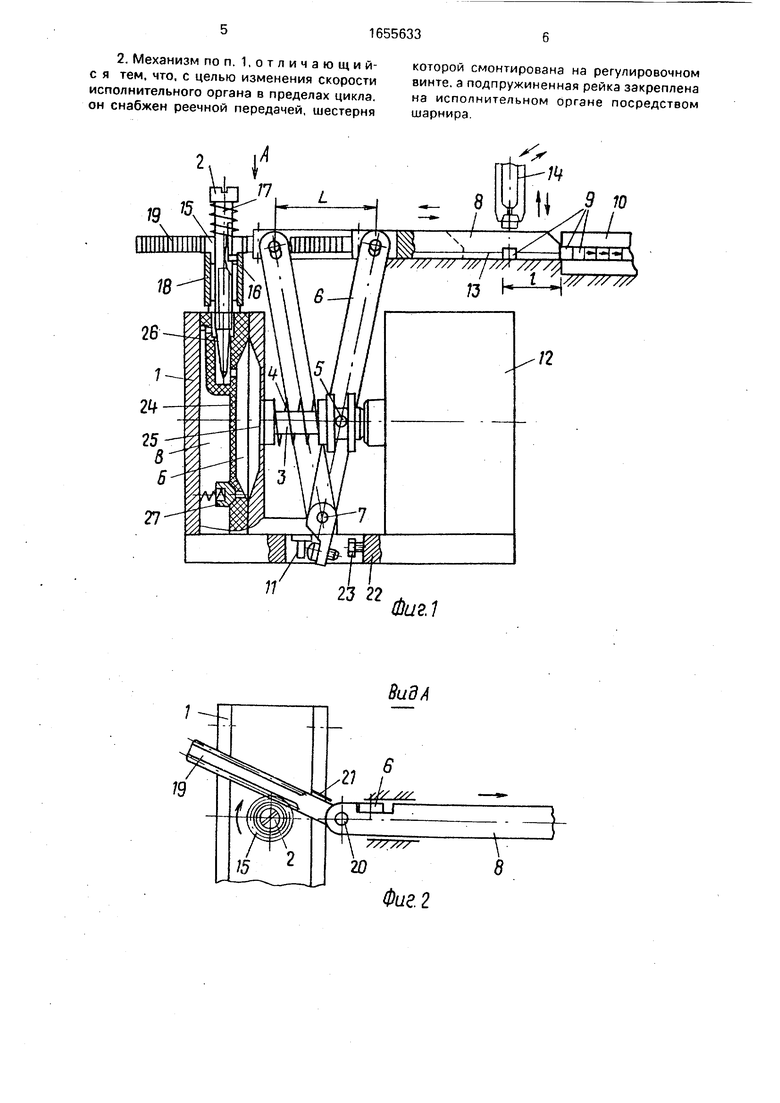
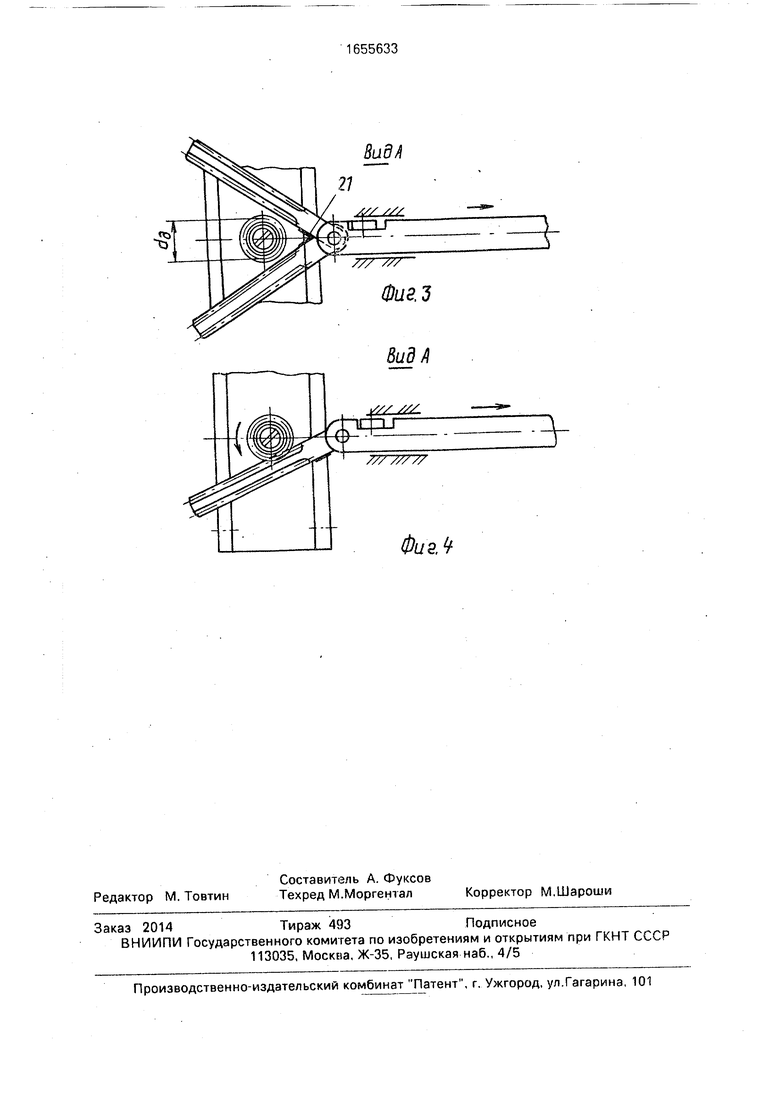
На фиг 1 изображен механизм перемещения в позиции перемещения полупроводниковых кристаллов общий вид, на фиг 2 вид А на фиг 1 в случае повышения скорости в процессе цикла перемещения, на фиг
3- то же при постоянной скорости, на фиг.
4- то же, при понижении скорости в процессе цикла перемещения
Механизм перемещения содержит привод перемещения, выполненный в виде пневматического реле времени, включающего пневмокамеру 1, с регулировочным винтом 2, которым регулируется скорость перемещения штока 3, подпружиненного пружиной 4 Со штоком 3 посредством кольца 5 шарнирно связано плечо рычага 6, поворачивающегося вокруг оси 7 служащей
О
ел ел о со со
точной опоры рычага. Рычаг 6 имеет два плеча: одно, соединенное со штоком реле, связано с шибером 8. служащим для перемещения полупроводниковых кристаллов 9 на расстояние I в кассету 10, а второе плечо взаимодействует с имеющейся в реле времени контактной группой 11,которая сигнализирует системе о положении рычага 6. Выводит в исходное положение рычага 6 - электромагнит 12, а выносит в исходное положение на приемный стол 13 кристалл 9 - присоска 14. На регулировочном винте 2 выполнен шпоночный паз и установлена шестерня 15. Шестерня 15 взаимодействует с винтом 2 при помощи шпоночного паза и штифта 16. Шестерня 15 служит для регулирования скорости (повышения или снижения) шибера 8 в процессе его перемещения в одном цикле. Шестерня 15 подпружинена пружиной 17 к втулке 18. На конце шибера 8 имеется рейка 19, подсоединенная к нему шарнирно при помощи оси 20. Рейка 19 подпружинена пружиной 21 к шестерне 15, если требуется изменение скорости в процессе перемещения шибера 8, или к опорному элементу 8 - если скорость должна быть постоянной. В этом случае пружина 21 переставляется и действует в обратном направлении.
Все элементы механизма смонтированы на основании 22. Для изменения хода L шибера 8 служит регулировочный винт 23.
Пневмокамера 1 включает диафрагму 24 и мембрану 25. Диафрагма 24 делит пнев- мокамеру 1 на две полости Б и В, а мембрана 25 соединена со штоком 3. В диафрагме 24 выполнено сопло 26, которое перекрывает винт-игла 2 и образует дроссель. В диафрагме смонтирован обратный клапан 27.
Механизм перемещения работает следующим образом.
Вначале производят настройку механизма на один из трех возможных режимов работы. Постоянная скорость перемещения в процессе цикла Vn, настраивается винтом 2, и рейка 19 в этом случае выводится из зацепления с шестерней 15 (фиг. 3). При переменной, увеличивающейся скорости от Vi до V2 винтом 2 механизм настраивается на скорость Vi, входом L или делительным диаметром г1д шестерни 15 настраивается скорость /2. Рейка 19 в этом случае вводится в зацепление с шестерней 15с той стороны, чтобы винт 2 вывинчивался из корпуса пневмоцилиндра 1. При уменьшающейся скорости от /2 до Vi, винтом 2 механизм настраивается на скорость V2, а ходом L или подбором делительного диаметра йд шестерни 15 добиваются скорости VL При этом рейку 19 вводят в зацепление с шестерней
15 с той стороны, чтобы винт 2 ввинчивался в корпус пневмоцилиндра.
Перед укладкой и перемещением кристалла 9 в нужное положение вакуумной
присоской 14 на стол 13 происходит установление шибера 8 в исходное положение. Для этого на электромагнит 12 подается напряжение, сердечник электромагнита 12 давит на шток 3, сжимая пружину 4, Мембрана
25 мгновенно перемещается влево (фиг. 1), так как открывается обратный клапан 27. После этого присоска 14 укладывает на приемный стол 13 кристалл 9. подлежащий кас- сетированию, и убирается вверх. Затем с
электромагнита 12 снимается напряжение, и сердечник мгновенно освобождает шток 3. Пружина 4 перемещает шток 3 вправо (фиг. 1). Возникший перепад давления снаружи пневмокэмеры 1 и в полости Б заставит воздух, находящийся в полости В, через дроссель (винт-иглу 2 и сопло 26) поступать в полость Б. После чего шибер 8 перемещается при помощи рычага 6 под действием пружины 4 с определенной скоростью. Поеле прохождения шибером 8 расстояния (L- I) начинает перемещаться кристалл 9 по каналу приемного стола 13 в кассету 10. После подачи кристалла 9 в кассету 10 контактная группа 11 дает об этом подтверждение и выдает очередной сигнал.
Формула изобретения
1. Механизм перемещения деталей,
преимущественно миниатюрных изделий, содержащий исполнительный орган с приводом его перемещения, связанные между собой соединительным элементом, отличающийся тем, что, с целью повышения
надежности механизма путем точной настройки скорости перемещения исполнительного органа и ее стабилизации, он снабжен средством для регулирования скорости перемещения исполнительного орга5 на, выполненным в виде пневмокамеры, на которой установлены регулировочный винт настройки скорости перемещения исполнительного органа, контактные элементы системы управления и подпружиненный шток,
0 смонтированный с возможностью взаимодействия с приводом перемещения исполнительного органа, при этом последний выполнен в виде электромагнита, а соединительный элемент выполнен в виде за5 крепленного посредством шарнира на упомянутом штоке двуплечего рычага, одно плечо которого установлено с возможностью взаимодействия с контактными элементами системы управления, а другое закреплено на исполнительном органе,
2. Механизм по п. 1.отличающий- с я тем, что, с целью изменения скорости исполнительного органа в пределах цикла. он снабжен реечной передачей, шестерня
которой смонтирована на регулировочном винте, а подпружиненная рейка закреплена на исполнительном органе посредством шарнира
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения дизеля | 1989 |
|
SU1668715A1 |
| Система управления тяговым энергетическим средством | 1990 |
|
SU1770165A1 |
| Устройство для группового дозирования кормов в зависимости от надоя молока | 1976 |
|
SU650581A1 |
| Устройство Кривовязюка для отделения нижнего листа от стопы | 1980 |
|
SU937088A1 |
| Станок для монтажа золотника в стебель вентиля пневмокамеры и для наполнения воздухом последней | 1981 |
|
SU1002168A1 |
| Автомат для насекания круглых надфилей | 1991 |
|
SU1816573A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Люнет для круглошлифовальных станков | 1987 |
|
SU1567349A1 |
| Устройство а.с.кривовязюка длязАгРузКи лиСТОВОгО МАТЕРиАлА НАКАРЕТКу | 1979 |
|
SU837499A1 |
| Механизм сжатия машин для контактной точечной сварки | 1981 |
|
SU975281A1 |
Изобретение относится к автоматизации производственных процессов Оно м б использовано в производстве изделий микроэл строники для перемещения миниатюрных изделий, например полупроводниковых кристаллов при загрузке их в кассету после снятия с липкого носителя Цель изобретения - повышение надежности работы путем оптимизации скорости перемещения. Механизм перемещения содержит пневматическое реле времени включающее пнев- мокамеру со штоком и регулировочным винтом которым регулируется скорость перемещения штока контактную группу и электромагнит который возвращает шток в исходное положение, исполнительный орган в виде шибера и соединительный элемент который связывает шток пневмокамеры с исполнительным органом и взаимодействует с контактной группой пневматического реле На регулировочный винт пневмокамеры установлена шестерня, а на исполнительный орган-рейка, подпружиненная к шестерне и взаимодействующая с ней Механизм перемещения позволяет обеспечить перемещение изделий с минимальными отклонениями скорости от заданных параметров и с изменением скорости в пределах цикла 1зп ф-лы,4ил Ё
23 22
S
S
14
8
И 9 Ю
ли.
Фиг.1
ВидА
8
Фиг. 2
//
Bad A
Вид А
У
// /SZ////////
Фид.
| Кожевников С Н , Есипенко Л И Рас- кинЛ.М Механизмы М Машиностроение, 1976, с 771,рис 13 59 |
