1
Изобретение относится к области обработки материалов давлением, в частности к оборудованию для производства цилиндрических пружин малого индекса с 3,5.
Известен автомат для навивки пружин, содержащий смонтированные на станине с направляюа1ими бухтодержатель, механизм подачи проволоки, механизм формообразования спирали с шагообразующим устройством, выполненный в виде фигурной оправки, размещенной консольно во втулке 1.
Недостаток известного автомата заключается в том, что его технологические возможности ограничены.
Наиболее близким является автомат для навивки пружин, содержащий смонтированные на станине с направляющими бухтодержатель, роликовый механизм подачи проволоки, механизм формообразования спирали с шагозадающим устройством, приводное устройство для резки спирали, механизм блокировки останова, программный командоаппарат с кулачками и регулировочные упоры 2.
Недостаток известного автомата заключается в том, что его технологические возможности ограничены.
Целью изобретения является расщирение технологических возможностей.
Указанная цель достигается тем. что 5 известный автомат для навивки пружин, содержащий смонтированные на станине с направляющими бухтодержагсль. po.inковый механизм подачи проволоки, механизм формообразования спирали с щагообразующим устройством, приводное устройство для резки спирали, механизм блокировки автоматического останова, программный командоаппарат с кулачками и регулировочные упоры, снабжен силовым цилиндром, щток которого щарнирно закреплен на станине, а корпус имеет кронщтейн с кулачком, зубчатую рейку и поворотный фигурный копир и смонтирован с возможностью возвратно-поступательного перемещения, механизм подачи проволоки имеет ведомые валы и ведущий центральный
20 вал с щестернями, одна из которых взаимодействует с зубчатой рейкой силового цилиндра, а другая - с щестернями ведомых валов, снабженных муфтами свободного
хода. Шагообразующее устройство механизма формообразования спирали состоит из шагообразующего ролика, подпружиненных звена и ползуна, двух шарнирно закрепленных на станине двуплечих рычагов, один из которых взаимодействует с подпружиненным ползуном, а другой посредством смонтированного на нем винта настройки - с первым рычагом и с поворотным фигурным копиром посредством подпружиненного звена. Приводное устройство для резки спирали состоит из шарнирно закрепленных на станине рычага с регулировочным винтом, двуплечего рычага, одно плечо которого выполнено телескопическим и имеет кулачок, установленный с возможностью взаимодействия с кулачком силового цилиндра, а другое плечо контактирует с регулировочным винтом, подпружиненной призмы, каркаса с зубчатой рейкой и с плоскими пружинами, смонтированного в каркасе приводного шпинделя с абразивными отрезными кругами и шестеренчатого механизма.
Кроме того, между отрезными кругами размещены плоские пружины, а устройство для резки спирали установлено с возможностью перемещения вдоль навиваемой пружины по направляющим станины посредством шестеренчатого механизма, имеющего маховик.
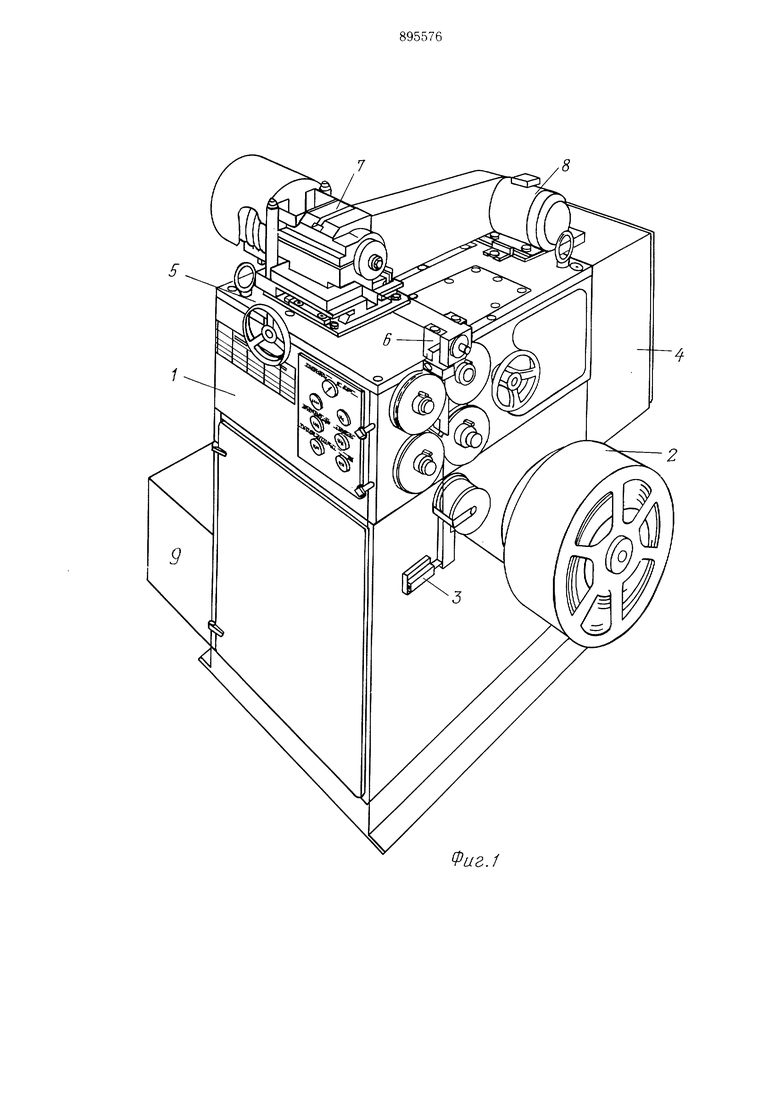
На фиг. 1 изображен общий вид автомата,
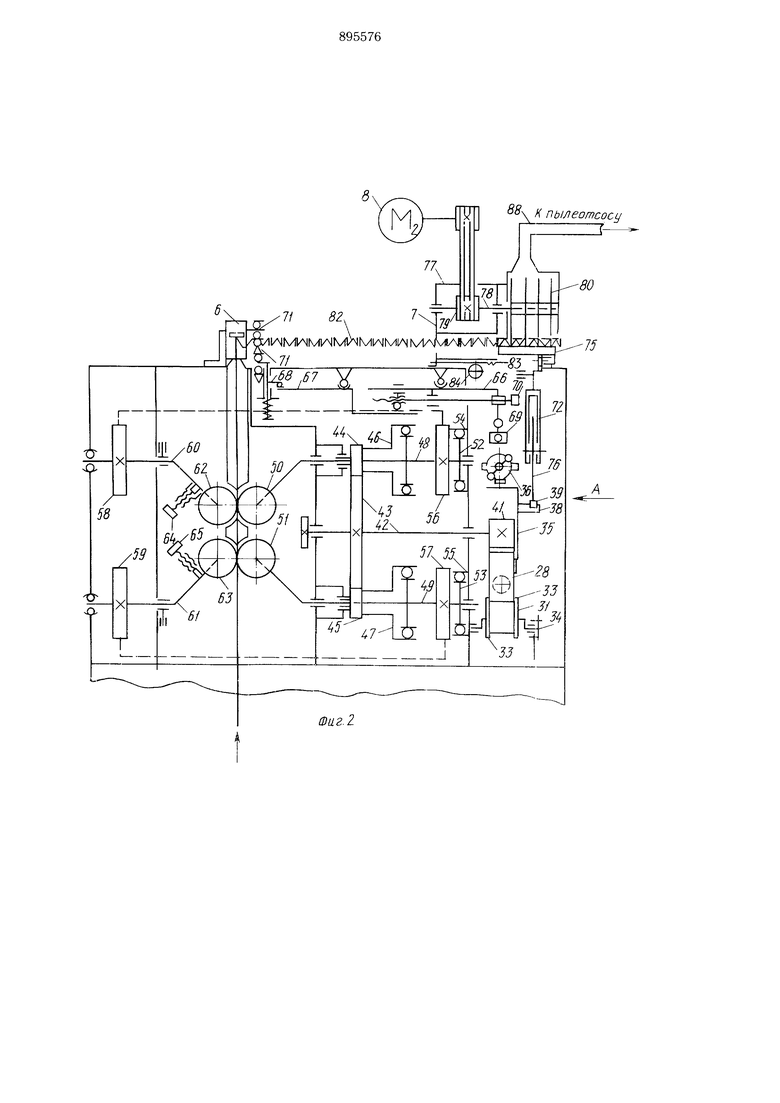
на фиг. 2 - часть кинематической схемы
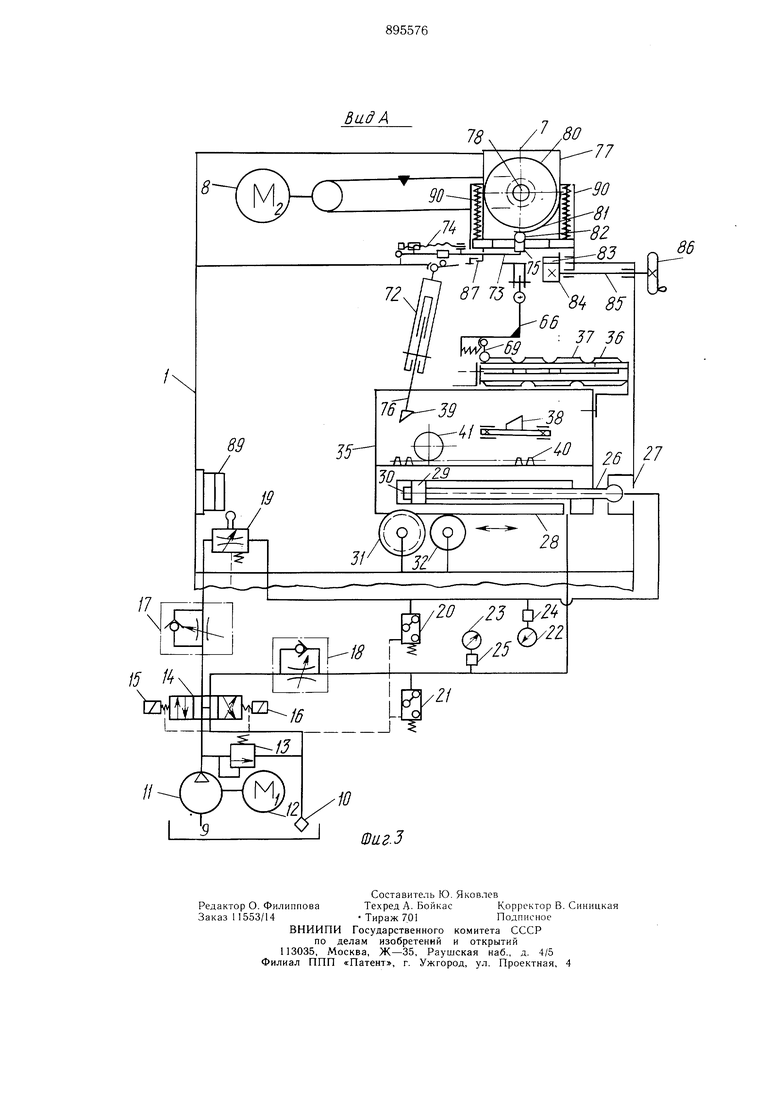
автомата; на фиг. 3 - вид по стрелке А.
Автомат для навивки пружин содержит станину , на которой смонтирован бухтодержатель проволоки 2, механизм блокировки 3 автоматического останова и электрошкаф 4. На станине 1 имеется стол 5, на котором расположено приводное устройство формообразования пружины б и отрезная бабка 7 с приводом от электродвигателя 8.
Внутри станины 1 расгюлагается гидраЕзлический привод, состоящий из гидростанции, а также механизм подачи проволоки, узел координации, механизм шагообразования пружин и механизм отрезки.
Гидростанция состоит из гидробака 9, фильтра 10, насоса 11, связанного с электродвигателем 12, предохранительного клапана 13, распределителя 14 с двумя электромагнитами 15 и 16, магистральных дросселей 17 и 18, осевого дросселя 19, реле давлений 2G и 21, манометров 22 и 23 с демпферами 24 и 25, а также из гидроцилиндра, содержащего неподвижный шток 26, шарнирно закрепленный в опоре 27 станины 1, и силовой цилиндр 28. Поршень 29 штока 26 имеет демпфирующий выступ 30, служащий для плавного начала и торможения хода цилиндра 28 в конце своего пути.
Силовой цилиндр 28 опирается на опорные ролики 31 и 32.
Опорный ролик 31 выполнен с буртиками 33 и является направляющим роликом.
Кроме того, он имеет эксцентриковую ось 34, позволяющую осуществлять вертикальную настройку цилиндра 28.
Программный командоаппарат состоит из закрепленного на цилиндре 28 кронштейна 35, на котором расположен поворотнь1Й копир 36 с кулачковой сменной планкой 37, связанной с рычажной системой механизма щагообразования.
На кронштейне 35 закреплен кулачок 38, взаимодействующий с кулачком 39 механизма отрезки пружин.
Механизм подачи проволоки состоит из закрепленной на силовом цилиндре 28 зубчатой рейки 40, связанной с шестерней 41, установленной на приводном валу 42. Ведущий вал 42 через лестерни 43-45 и муфты свободного хода 46 и 47 связан с ведомыми валами подачи 48 и 49 при передаче вращения в одном направлении. Ведомые валы подачи 48 и 49 с одной стороны связаны с подающими проволоку роликами 50 и 51, а с другой - с муфтами свободного хода 52 и 53, у которых наружные обоймы 54 и 55 закреплены на станине 1 и служат для устранения «от/.ачи после остановки подачи проволоки.
Валы подачи 48 и 49 имеют шестерни 56 и 57, которые связаны с шестернями 58 и 59, передающими крутяший момент на «плавающие валы лодачи 60 и 61, предназначенные для осуществления через ролики 62 и 63 зажима проволоки с помощью
винтов 64 и 65 и передачи на нее усилия подачи.
Механизм шагообоазования пружин обеспечивает двойное функциональное назначение - величину шага и количество заданJ ных шагов.
Этот механизм г.остоит из рычажной системы: двуплечего рычага 66, связанного с двуплечим рычагом 67, который взаимодействует с подпру.жиноинь-,1к ползуном 68.
0 Рычаг 66 на одном fLj;:4e и:леет по.акащивающееся в сторону обратного хода цилиндра 28 звено 69, связанное с кулачковой сменной планкой 37 эычага 66. Длина другого плеча регулируется винтом 70. Ползун 68 на верхнем конце имеет шагообрз5 зующ.ий ролик 71.
Механизм отрезк/i состоит кз отрезной бабки 7 с приводом от электродвит-ателя 8 и рычажной системы. Рычажная система включает телескопический :;,вулле1ий рьQ чаг 72, связанный с рычагом второго рода 73 плечи которого регулируются 74 и который взаимодейстзует с тюдггруя-нненной призмой 75. Длинное плечо телескопического рычага 72 имеет скользящее вдоль плеча звено 76, оканчивающееся кулачком 39.
5 Отрезная бабка 7 сост(;ит n.i каркаса 77, шпинделя 78, на котором расположен шкив 79, передающий движение на хонсольную часть шпинделя, где закреплены с заданным шагом абразивные отрезные круги 80. Под абразивными кругами 80 и между ними расположены плоские пружины 81, прикрепленные одним концом к каркасу 77. Пружины 81 служат для поджима навиваемой пружины 82 к призме 75 и обеспечивают перпендикулярность торцов отрезанных пружин к их оси. Каркас 77 снабжен зубчатой рейкой 83, связанной с шестерней 84, сидящей на валу 85, и маховиком 86. С помощью маховика 86 обеспечивается установка абразивных кругов 80 напротив середины поджатых участков витков образованной пружины 82 перемещением всей отрезной бабки 7 вдоль оси пружины 82 по направляющим 87. Абразивные круги 80 закрыты кожухом 88. Из условия перпендикулярности торцов отрезанных пружин к их оси отрезная бабка 7 расположена от механизма формообразования пружины 6 на некотором расстоянии, обеспечивающем достаточно упругую деформацию образованной пружины 82 и надежный ее поджим плоскими пружинами 81 в момент ее подачи призмой 75 на разрезку. На внутренней стенке станины 1 закреплен сменный упор 89, служащий ограничителем хода гидроцилиндра 28, заданного навиваемой длиной пружины. В каркасе 77 отрезной бабки установлены пружины 90, взаимодействующие с призмой 75. Принцип работы автомата. При включении электродвигателя 12 и связанного с ним насоса 11 рабочая жидкость гидросистемы подается через распределитель 14 на слив в бак. Одновременно с включением электродвигателя 12 включается электродвигатель 8. При включении электромагнита 15 распределителя 14 рабочая жидкость нагнетается через дроссели 17 и 19 во внещтоковую полость силового цилиндра 28, вызывая его движение и движение связанных с ним механизма подачи проволоки и механизма шагообразования. Скорость перемещения цилиндра 28 настраивается дросселем 17. Проволока при помощи роликов 50, 51, 62 и 63 механизма подачи подается в механизм формообразования 6, где она приобретает кривизну и кручение, присущее винтовой линии навивки с прижатыми витками. При выходе из механизма формообразования 6 прижатые витки навиваемой пружины периодически разводятся шаговым роликом 71 механизма шагообразования. При этом барабан 36 передает колебательное движение рычагу 66 через звено 69. Поворачиваясь, рычаг 66 своим регулируемым плечом передает движение рычагу 67, который через ползун 68 внедряет ролик 71 между витками навиваемой пружины 82, обеспечивая определенный шаг в зависимости от длины настройки регулируемого плеча рычага 66 посредством винта 70. Время внедрения ролика 71 зависит от длины верхних прямых участков кулачков 37. При обратном ходе цилиндра 28 звено 69 подкашивается и качательного движения рычаг 66 не передает. В конце хода цилиндра 28 кулачок 38 входит в зацепление с кулачком 39 механизма отрезки пружин и цилиндр 28 взаимодействует со щтоком осевого дросселя 19, который уменьшает расход рабочей жидкости в полость цилиндра, вызывая торможение его хода. Дойдя до упора 89, цилиндр 28 останавливается, что вызывает рост давления в гидросистеме и срабатывание реле давления 20, которое отключает электромагнит 15 и включает электромагнит 16. Электромагнит 16 переводит золотник распределителя 14 в другое положение, и тем самым рабочая жидкость нагнетается через дроссель 18 в штоковую полость цилиндра 28. Совершая обратный ход, силовой цилиндр 28 приводит в действие устройство для отрезки через сцепленные кулачки 38 и 39, а механизмы подачи и шагообразования отключаются из-за разрыва кинематической цепи. Муфты свободного хода 46 и 47 отключают подачу проволоки при обратном вращении ведущего вала 42, а подкашивающееся звено 69 под действием обратного хода копира 36 отключает механизм шагообразования спирали. Скорость обратного .хода цилиндра 28 настраивается дросселем 18. При обратном ходе цилиндра 28 кулачок 38 начинает поворачивать телескопический двуплечий рычаг 72, который своим коротким плечом поднимает рычаг 73 и вместе с ним призму 75 с пружиной 82 на вращающиеся отрезные круги 80. В конце обратного .хода цилиндра 28 кулачки 38 и 39 расцепляются, призма 75 ПОД действием пружин 90 опускается и приводит рычажную систему 73. 72 и 76 в исходное положение, а ход цилиндра 28 плавно затормаживается до полной остановки за счет дросселирования рабочей жидкости через кольцевой зазор, образованный проточкой в головке цилиндра 34 и плунжером штока 26. При остановке силового цилиндра 28 происходит рост давления в гидросистеме и срабатывает реле давления 21, которое через электромагнит перемещает золотник распределителя 14, меняя линию нагнетания Цикл движения цилиндра 28 повторяется. При настройке копир 36 поворачивается вручную, обеспечивая взаимодействие кулачков 38, соответствующих определенному типу навиваемых пружин, с роликом звена 69. Затем устанавливается сменный упор 89.
Вначале навиваемая пружина 82 с чередующимися зонами прижатых витков навивается без отрезки до тех пор, пока она не пройдет по призме 75. Отрезная бабка 7 перемещается маховиком 86 так, чтобы отрезные круги 8 находились напротив середины зоны прижатых витков навитой пружины 82.
Далее включается механизм отрезки и в автоматическом режиме движущаяся навиваемая пружина 82 сбрасывает отрезные заготовки пружины с призмы 75. Такое конструктивное решение автомата для навивки пружин существенно расширяет его технологические возможности.
Формула изобретения
1. Автомат для навивки пружин, содержащий смонтированные на станине с направляющими бухтодержатель, роликовый механизм подачи проволоки, механизм формообразования спирали с щагообразующим устройством, приводное устройство для резки спирали, механизм блокировки автоматического останова, программный командоаппарат с кулачками и регулировочные упоры, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен силовым цилиндром, шток которого шарнирно закреплен на станине, а корпус смонтирован с возможностью возвратнопоступательного перемещения посредством направляющих роликов и имеет кронштейн с кулачком, зубчатую рейку и поворотный фигурный копир, механизм подачи проволоки имеет валы и ведущий центральный вал с шестернями, одна из которых взаимодействует с зубчатой рейкой силового цилиндра, а другая - с шестернями ведомых валов.
снабженных муфтами свободного хода, шагообразующее устройство механизма формообразования спирали состоит из шагообразующего ролика, подпружиненных звена и ползуна, двух щарнирно закрепленных на
станине двуплечих рычагов, один из которых взаимодействует с подпружиненным ползуном, а другой посредством смонтированного на нем винта настройки - с первым рычагом и с поворотным фигурным копиром посредством подпружиненного звена,
приводное устройство для резки спирали состоит из шарнирно закрепленных на станине рычага с регулировочным винтом, двуплечего рычага, одно плечо которого выполнено телескопическим и имеет кулачок, установ..г|енный с возможностью взаимодействия с кулачком силового цилиндра, а другое плечо контактирует с регулировочным винтом, подпружиненной призмы, каркаса с зубчатой рейкой и с плоскими пружинами, при этом в каркасе с зубчатой рейкой смонтирован каркас приводного шпинделя с абразивными отрезными кругами.
2.Автомат по п. 1, отличающийся тем, что между отрезными кругами размещены
плоские пружины.
3.Автомат по пп. 1 и 2, отличающийся тем, что устройство для резки спирали установлено с возможностью перемещения вдоль навиваемой пружины по направляющим станины посредством шестеренчатого механизма, имеющего маховик.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1076065, кл. В 21 F3/02 1954.
2.Авторское свидетельство СССР
№ 599896, кл- В 21 F35/00, 1975 (прототип).
Фиг./

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Автомат для изготовления пружинных шайб | 1983 |
|
SU1161217A1 |
| Автомат для изготовления пружин кручения | 1987 |
|
SU1416250A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИН С ДВУХСТОРОННЕЙ НАВИВКОЙ И ИЗГИБОМ В СРЕДНЕЙ ЧАСТИ | 2001 |
|
RU2197356C1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Шагозадающее устройство к пружинонавивочному автомату | 1976 |
|
SU578145A1 |
| Устройство для изготовления резьбовых спиральных вставок | 1987 |
|
SU1447503A1 |
| Автомат для навивки пружин | 1975 |
|
SU599896A1 |
| Автомат для изготовления пружин кручения | 1987 |
|
SU1416249A1 |
| Устройство для навивки пружин на токарных станках, преимущественно с ЧПУ | 1990 |
|
SU1796327A1 |