- фиг.1
о ел о
Јь О О
Изобретение относится к измерительной технике и может быть использовано для измерения угловой скорости вращающихся валов механизмов и машин в электромеханических системах автоматического регулирования.
Целью изобретения является упрощение и повышение точности и надежности датчика.
На фиг.1 приведена структурная схема предлагаемого датчика; на фиг.2 - временные диаграммы сигналов на выходах блоков 2, 4 и 5 устройства.
Датчик угловой скорости содержит си- нусно-косинусный вращающийся трансформатор (СКВТ) 1, амплитудный демодулятор 2, перемножитель 3, фильтр 4, интегратор 5 и косинусный преобразователь 6. Первый вход перемножителя 3 соединен с выходом демодулятора 2, подключенного своим входом к синусной обмотке СКВТ 1, второй вход - с выходом преобразователя 6, подключенного своим входом к выходу интегратора 5, а выход - с входом фильтра 4, подключенного своим выходом к выходу датчика и к входу интегратора 5.
Датчик угловой скорости работает следующим образом.
Ротор СКВТ 1 вращается с угловой скоростью ш , подлежащей измерению, в его синусной обмотке наводится сигнал на частоте питания,амплитуда которого пропорциональна синусу угла а поворота ротора. Этот сигнал поступает на вход демодулятора 2. На выходе последнего формируется сигнал Da вида
1)2 АО sin a,
где АО - постоянный уровень, определяемый суммарным коэффициентом передачи СКВТ 1 и демодулятора 2.
Сигнал U2 (фиг,2) поступает на первый вход перемножителя 3.
На выходе преобразователя 6 формируется сигнал Us вида
Ue Ueocos/3,
где Ueo - постоянный уровень, определяемый суммарным коэффициентом передачи интегратора 5 и преобразователя 6;
ft- угол поворота ротора СКВТ 1, измеряемый интегратором 5.
Сигнал Ue поступает на второй вход перемножителя 3. На выходе перемножителя 3 формируется сигнал Уз, пропорциональный произведению сигналов на его входах:
Уз - K3U2Ue - Кз АО U6o sin a cos /5 К3 АО U60
sin (« -/J) +
+ ,n(a+)i
где Кз коэффициент передачи перемножителя 3.
Фильтр 4 представляет собой фильтр нижних частот. Сигнал 11з, проходя фильтр
4, усредняется и усиливается с одновременным подавлением шумов и высокочастотной
Кз АО U60 , , , а (а +р). Сиг
составляющей
нал Щ на выходе фильтра 4 имеет вид
U4 J lJ 3AoUeo s|p (
0
5
0
5
0
5
0
5
где Кз - коэффициент передачи фильтра 4.
Сигнал 1М поступает на вход интегратора 5. На выходе последнего формируется сигнал, равный измеренному значению /Зугла поворота ротора СКВТ 1.
В установившемся режиме скорости изменения углов аи/ уравниваются, а фазо- выйсдвигуэ а- становится постоянным, пропорциональным скорости изменения этих углов.
Таким образом, датчик представляет собой следящую систему, осуществляющую слежение за углом а поворота ротора СКВТ 1
Сигнал LM на входе интегратора 5 (на выходе фильтра 4 и датчика в целом) пропорционален производной угла (3 . Поскольку скорости изменения углов а. и /3 в установившемся режиме равны, этот сигнал пропорционален и угловой скорости ш, подлежащей измерению.
Формула изобретения Датчик угловой скорости, содержащий синусно-косинусный вращающийся трансформатор, амплитудный демодулятор, вход которого подключен к синусной обмотке си- нусно-косинусного вращающегося трансформатора, перемножитель, первый вход которого подключен к выходу амплитудного демодулятора, а последовательно соединенные фильтр, выход которого является выходом датчика, интегратор и косинусный преобразователь, выход которого подключен к второму входу перемножителя, отличающийся тем, что, с целью упрощения и повышения точности и надежности датчика, в нем вход фильтра соединен с выходом перемножителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловой скорости | 1988 |
|
SU1624328A1 |
| Датчик угловой скорости | 1979 |
|
SU838564A1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1649665A1 |
| Датчик угловой скорости | 1975 |
|
SU556384A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| Функциональный преобразователь угла поворота вала в код | 1978 |
|
SU748480A1 |
| Функциональный преобразователь угла поворота вала в код | 1988 |
|
SU1589394A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1690198A2 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2580153C1 |
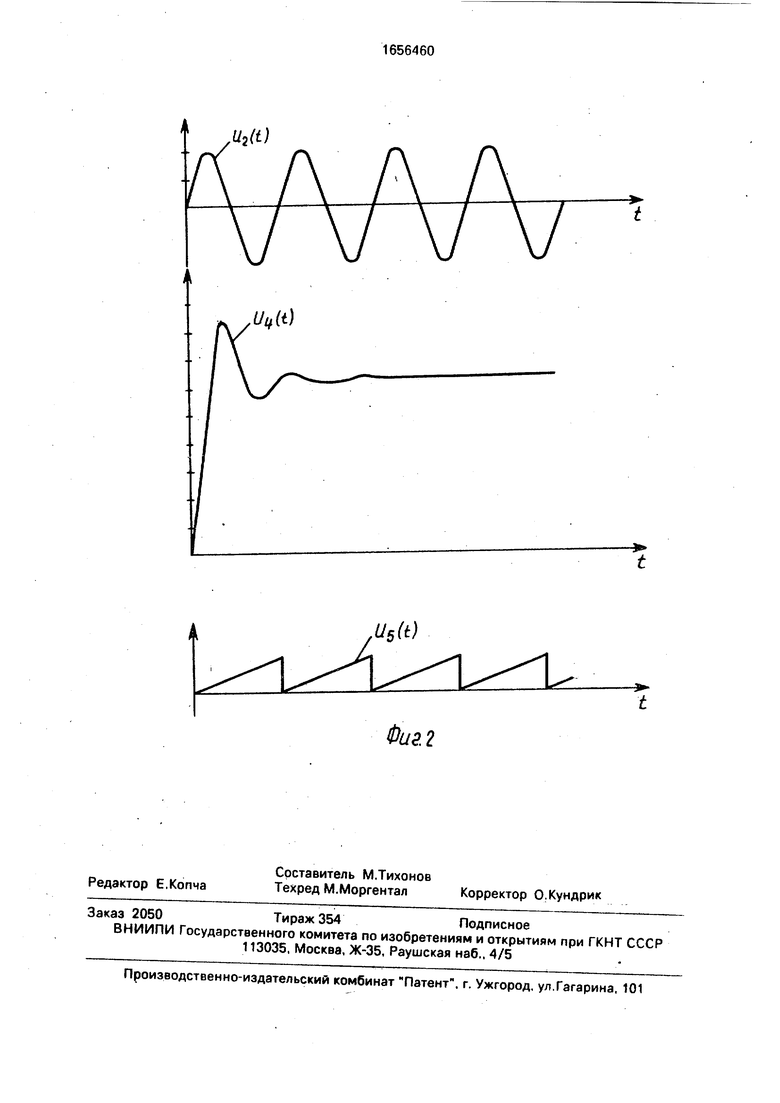
Изобретение относится к измерительной технике и может быть использовано в системах регулирования в качестве датчика угловой скорости. Целью изобретения является повышение точности и надежности датчика. Ротор синусно-косинусного вращающегося трансформатора 1, связанный с измеряемым валом, вращается с угловой скоростью, подлежащей измерению. Сигнал, наводимый в его синусной обмотке, демодулируется в амплитудном демодуляторе 2 и поступает на один из входов перемножителя 3, на другой вход которого подключен выход контура обратной связи, образованного фильтром 4, интегратором 5 и косинусным преобразователем 6. В устройстве осуществляется слежение за выход- ным сигналом демодулятора 2, пропорциональным углу поворота вала, Сигнал на входе интегратора 5 следящего контура пропорционален измеряемой угловой скорости,2 ил.
Фиг 2
| Датчик угловой скорости | 1975 |
|
SU556384A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
