1
Изобретение относится к измерителной технике и может быть использовано для измерения угловой скорости вращающихся валов механизмов и машин в электромеханических системах автоматического регулирования.
Известен датчик угловой скорости, содержащий линейные измерители углового положения с последующим включением линейных дифференцирующих цепей 1 .
Однако такой датчик очень чувствителен к помехам и имеет низкую разрешающую способность.
Известен также датчик угловой CKQрости, содержащий синусно-косйнусный вращающийся трансформатор, к синусной и косинусной обмоткам .которого подключены амплитудные демодуляторы, линейный фильтр, подключенный через интегратор к входам нелинейных элементов соответственно с синусоидальной характеристиками 2.
Недостатком этого датчика является ограниченная точность, обусловленная трудностью обеспечения высокой идентичности характеристик входящих в состав датчика двух множительных устройств.
Целью изобретения является повышение точности датчика.
Поставленная цель достигается тем, что в датчик введены генератор так товых импульсов, три кo 1мyтaтopa, последовательно соединенные,сумматор, нелинейный элемент с квадратичной характеристикой, инвертор, при этом выход генератора тактовых им0пуЛьсов подключен к управляющим входам коь- мутат6ров, сигнальные входы первого коммутатора подключены к выходам амплитудных демодуляторов, а выход - к первому входу сумматора,
5 сигнальные входы второго коммутатора подключены к выходам нелинейных элементов с синусоидальной и косинусоидальной характеристиками, а выход ко второму входу сумматора, первый
0 сигнальный вход третьего коммутатора подключен к выходу нелинейного элемента с квадратичной характеристикой, второй сигнальный вход - к выходу инвертора, а выход - ко входу
5 линейного фильтра.
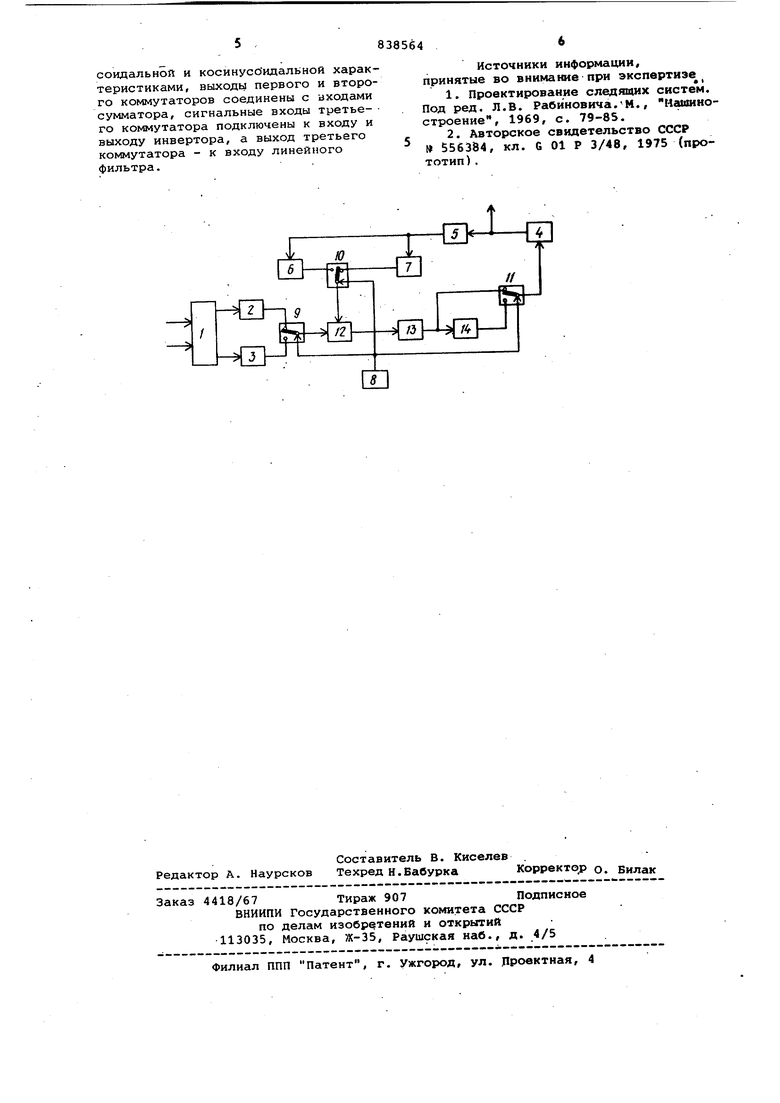
На чертеже приведена структурная схема датчика угловой скорости.
Датчик угловой скорости содержит синусно-косйнусный вращающийся трансформатор 1, амплитудные демодуляторы 2 и 3, подключенные соответственно к синусной и косинусной обмоткам синусно-косинусного вращающегося трансформатора 1, линейный фильтр 4, выход которого через интегратор 5 соединен с входами нелинейных элементов 6 и 7 соответственно с синусоидальной и косинусоидальной характеристиками, генератор 8 тактовых импульсов , подключенный к управляющим входам коммутаторов 9, 10 и 11, последовательно соединенные сумматор 12 нелинейный элемент 13 с квадратичной характеристикой, инвертор 14, сигналные входы коммутатора 9 подключены соответственно к выходам амплитуд- ных демодуляторов 2 и 3, а выход коммутатора 9 подключен к первому входу сумматора 12, сигнальные входы коммутатора 10 подключены к выходам соответствующих нелинейных элементов -6 и 7 соответственно с синусоидальной и косинусоидальной харатеристиками, а выход коммутатора 10 ко второму входу сумматора 12, первый сигнальный вход коммутатора 11 подключен к выходу нелинейного элемента с квадратичной характеристикой 13, а второй сигнальный вход к выходу инвертора 14, выход коммутатора 11 подключен к линейному . фильтру 4. .
Устройство работает следующим образом.
При повороте ротора синусно-косинусного вращающегося трансформатора (.СКВТ 1 на произвольный угол ot, на выходах амплитудных Демодуляторов 2 и 3 будут сигналы виДа
V AoSind. V2 AoCOS(X
где V - сигнал на выходе амплитудного демодулятора 2; V/ji - сигнал на выходе амплитудного демодулятора 3; АО - амплитуда сигнала. На выходах нелинейных элементов соответственно с синусной и косинусной характеристиками 6 и 7 будем иметь сигналы
V AOS i np V4 Aocos P) ,
где p - угол поворота ротора СКВТ, измеряемый интегратором 5; V - сигнал на выходе нелинейного элемента 6,
V4 - сигнал на выходе нелинейного элемента 7,
В первом положении коммутаторов 9 10 и 11, как показано на чертеже, сигналы V и Vg, пройдя через сумматор 12, нелинейный элемент 13 с квадратичной характеристикой образуют на входе линейного фильтра 4 сигнал положительной полярности, равный по величине 5 o(sino - -cosp)J.
В другом положении коммутаторов 9 10 и 11 сигналы V. и V.3 пройдя чере сумматор 12, нелинейный элемент 13 с квадратичной характеристикой и инвертор 14, образуют на входе линейного фильтра 4 сигнал отрицательной полярности, равный по величине (cosa +sinp)J.
Генератор 8 тактовых импульсов, управляя коммутаторами 9, 10 и 11, позволяет получить на входе лин йного фильтра 4. переменный сигнал, имеющий форму меандра, амплитуда положительных импульсов которого равна Vj-, а отрицательных - V.
Этот переменный сигнал, проходя через линейный фильтр 4, усредняется и усиливается с одновременным подавлением шумов, и при на выходе линейного фильтра 4 будем иметь сигнал
() , где cL угловая скорость;
Кф - коэффициент передачи линейного фильтра 4.
Сигнал /7 интегрируется интегратором 5 до тех пор, пока истинное значение угла d не будет близким к измеренному р , т.е. датчик представляет следующую систему за углом.
С выхода интегратора 5 снимается сигнал, равный измеренному значению угла р. Следовательно на входе интегратора 5 или на выходе, датчика получен сигнал, пропорциональный производной от угла о поворота ротора СКВТ 1.
Достижение высокой точности измерения обусловлено тем, что промежуточное преобразование сигналов производится одним нелинейным элементом, имеющим квадратичную характеристику.
Формула изобретения
5 Датчик угловой скорости, содержащий синусно-косинусный врсодающийся трансформатор, к синусной и косинусной обмоткам которого подключены амплитудные демодуляторы, линейный фильтр, подключенный через интегратор к входам нелинейных элементов с синусоидальной и косинусоидальной характеристиками, отличающийс я тем, что, с целью повьошения точности, в него введены Генератор тактовых импульсов, три коммутатора, управляющие входы которых подключены к выходу генератора тактовых импульсов, и последовательно соединенные сумматор, нелинейный элемент с квадратичной характеристикой и инвертор, при -этом сигнальные входы первого коммутатора подключены к выходам амплитудных демодуляторов, сигнальные входы второго коммутатора подключены
5 к выходам нелинейных элементов с синусоидальной и косинусоидальной характеристиками, выходы первого и второго коммутаторов соединены с входами сумматора, сигнальные входы третье- го коммутатора подключены к входу и выходу инвертора, а выход третьего коммутатора - к входу линейного фильтра.
-41
hИсточники информации, принятые во внимание при экспертизе
1.Проектирование следящих систем. Под ред. Л.В. Рабиновича.М., Иашиностроение, 1969, с. 79-85.
2.Авторское свидетельство СССР
556384, кл. G 01 Р 3/48, 1975 (прототип) .
J-гт
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловой скорости | 1975 |
|
SU556384A1 |
| Датчик угловой скорости | 1988 |
|
SU1624328A1 |
| Датчик угловой скорости | 1988 |
|
SU1656460A1 |
| Функциональный преобразователь угла поворота вала в код | 1978 |
|
SU748480A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угол-код | 1973 |
|
SU444232A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2580153C1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Датчик угловой скорости | 1981 |
|
SU1010566A1 |
