Изобретение относится к замкнутым те- тевизионным системам и может быть использовано для автоматического управления положением рабочего инструмента в электро- импульсных технологиях
Цель изобретения - повышение быстродействия
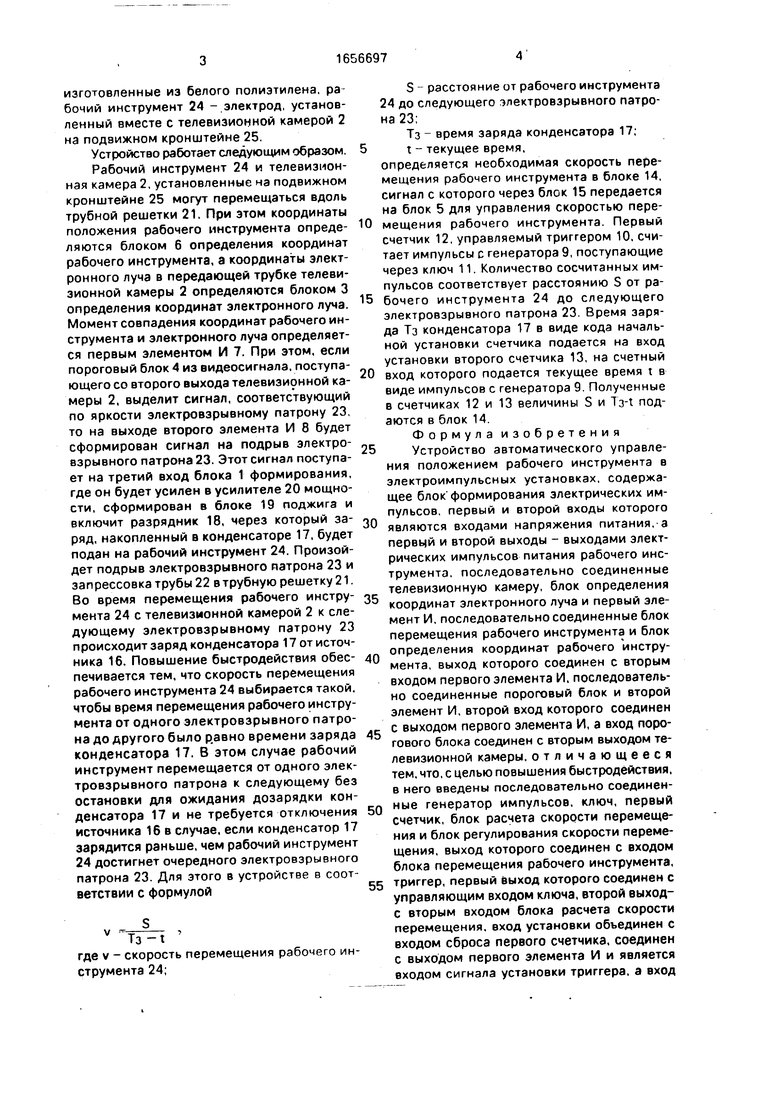
На чертеже показана электрическая структурная схема устройства автоматического управления положением рабочего инструмента в электроимпульсных установках.
Устройство содержит блок 1 формирования электрических импульсов, телевизионную камеру 2, блок 3 определения координат электронного луча, пороговый блок 4, блок 5
перемещения рабочего инструмента блок 6 определения координат рабочего инструмента, первый элемент и 7 второй элемент И 8, генератор9 импульсов триггер 10 ключ 11, первый счетчик 12 второй счетчик 13, блок 14 расчета скорости перемещения и блок 15 регулирования скорости перемещения
Блок 1 формирования электрических импульсов содержит источник 16 постоянного напряжения, накопительный конденсатор 17, управляемый разрядник 18, блок 19 поджига и усилитель 20 мощности
Кроме того, на чертеже показаны трубная решетка 21 со вставленными в нее трубами 22, электровзрывные патроны 23,
Р4
ел о о чэ
VI
изготовленные из белого полиэтилена, рабочий инструмент 24 - электрод, установленный вместе с телевизионной камерой 2 на подвижном кронштейне 25.
Устройство работает следующим образом.
Рабочий инструмент 24 и телевизионная камера 2, установленные на подвижном кронштейне 25 могут перемещаться вдоль трубной решетки 21. При этом координаты положения рабочего инструмента определяются блоком б определения координат рабочего инструмента, а координаты электронного луча в передающей трубке телевизионной камеры 2 определяются блоком 3 определения координат электронного луча. Момент совпадения координат рабочего инструмента и электронного луча определяется первым элементом И 7. При этом, если пороговый блок 4 из видеосигнала, поступающего со второго выхода телевизионной камеры 2, выделит сигнал, соответствующий по яркости электровзрывному патрону 23, то на выходе второго элемента И 8 будет сформирован сигнал на подрыв электровзрывного патрона 23. Этот сигнал поступает на третий вход блока 1 формирования, где он будет усилен в усилителе 20 мощности, сформирован в блоке 19 поджига и включит разрядник 18, через который заряд, накопленный в конденсаторе 17, будет подан на рабочий инструмент 24. Произойдет подрыв электровзрывного патрона 23 и запрессовка трубы 22 в трубную решетку 21. Во время перемещения рабочего инструмента 24 с телевизионной камерой 2 к следующему электровзрывному патрону 23 происходит заряд конденсатора 17 от источника 16. Повышение быстродействия обеспечивается тем, что скорость перемещения рабочего инструмента 24 выбирается такой, чтобы время перемещения рабочего инструмента от одного электровзрывного патрона до другого было р.авно времени заряда конденсатора 17. В этом случае рабочий инструмент перемещается от одного электровзрывного патрона к следующему без остановки для ожидания дозарядки конденсатора 17 и не требуется отключения источника 16 в случае, если конденсатор 17 зарядится раньше, чем рабочий инструмент 24 достигнет очередного электровзрывного патрона 23. Для этого в устройстве в соответствии с формулой
v
Тз-t 7
где v - скорость перемещения рабочего инструмента 24;
0
5
0
5
0
5
0
5
0
5
S - расстояние от рабочего инструмента 24 до следующего электровзрывного патрона 23;
Тз - время заряда конденсатора 17;
t - текущее время,
определяется необходимая скорость перемещения рабочего инструмента в блоке 14, сигнал с которого через блок 15 передается на блок 5 для управления скоростью перемещения рабочего инструмента. Первый счетчик 12, управляемый триггером 10, считает импульсы с генератора 9, поступающие через ключ 11. Количество сосчитанных импульсов соответствует расстоянию S от рабочего инструмента 24 до следующего электровзрывного патрона 23. Время заряда Тз конденсатора 17 в виде кода начальной установки счетчика подается на вход установки второго счетчика 13, на счетный вход которого подается текущее время t в виде импульсов с генератора 9. Полученные в счетчиках 12 и 13 величины S и Тз-t подаются в блок 14.
Формула изобретения
Устройство автоматического управления положением рабочего инструмента в электроимпульсных установках, содержащее блок формирования электрических импульсов, первый и второй входы которого являются входами напряжения питания, а первый и второй выходы - выходами электрических импульсов питания рабочего инструмента, последовательно соединенные телевизионную камеру, блок определения координат электронного луча и первый элемент И, последовательно соединенные блок перемещения рабочего инструмента и блок определения координат рабочего инструмента, выход которого соединен с вторым входом первого элемента И. последовательно соединенные пороговый блок и второй элемент И, второй вход которого соединен с выходом первого элемента И, а вход порогового блока соединен с вторым выходом телевизионной камеры, отличающееся тем. что, с целью повышения быстродействия, в него введены последовательно соединенные генератор импульсов, ключ, первый счетчик, блок расчета скорости перемещения и блок регулирования скорости перемещения, выход которого соединен с входом блока перемещения рабочего инструмента, триггер, первый выход которого соединен с управляющим входом ключа, второй выход- с вторым входом блока расчета скорости перемещения, вход установки объединен с входом сброса первого счетчика, соединен с выходом первого элемента И и является входом сигнала установки триггера, а вход
сброса соединен с выходом порогового блока, второй счетчик, счетный вход которого соединен с выходом генератора импульсов, вход установки является входом кода начальной установки счетчика, вход записи является входом сигнала записи кода
начальной установки счетчика, объединен с третьим входом блока формирования электрических импульсов и соединен с выходом второго элемента И, выход второго счетчика соединен с третьим входом блока расчета скорости перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления положением рабочего инструмента в электроимпульсных установках | 1987 |
|
SU1533016A1 |
| Устройство автоматического управления положением рабочего инструмента в электроимпульсных установках | 1988 |
|
SU1699012A1 |
| Устройство для определения взаимного расположения электрода и трубы с патроном при электрогидроимпульсной запрессовке | 1985 |
|
SU1418662A1 |
| Устройство для управления электроимпульсной установкой для запрессовки труб | 1988 |
|
SU1665337A2 |
| Способ контроля качества запрессовки труб и устройство для его осуществления | 1990 |
|
SU1839120A1 |
| Устройство для управления электроимпульсной установкой для запрессовки труб | 1984 |
|
SU1327058A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ЗАПРЕССОВКИ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
SU1600104A1 |
| Телевизионная система для измерения координат объектов | 1983 |
|
SU1107341A1 |
| Устройство управления взрывом при электроимпульсной запрессовке | 1987 |
|
SU1566322A1 |

Изобретение относится к замкнутым системам телевидения и может быть использо- вано для автоматического управления положением рабочего инструмента в элек троимпульсных технологиях Цель изобре тения - повышение быстродействия Координаты рабочего инструмента 24 электрода, установленного вместе с телеви зионной камерой 2 на подвижном кронш теине 25 определяются в блоке 6 и срав и ваются с координатами электронного луча При выделении пороговым блоком 4 сигнала яркости соответствующего белому электро взрывному патрону 23 блок 1 формирования электрических импульсов обеспечивает подрыв электровзрывного патрона 23 по еле чего рабочий инструмент 24 перемеща ется к следующему 9neKTpoB.ipb(BHOMv патрону 23 Быстродействие устройства обеспечивается тем что время перемещения рабочего инструмента 24 от одного электровзрывного патрона 23 до другого устанавливается равным времени заряда накопительного конденсатора 17 в блоке 1 Это позволяет не останавливать рабочий инструмент 24 перед каждым элекгровзрыв- ным патроном 23 и не отключать источник 16 постоянного напряжения при преждевременной зарядкр конденсатора 17 1 ил СП с
| Устройство автоматического управления положением рабочего инструмента в электроимпульсных установках | 1987 |
|
SU1533016A1 |
